(仅供参考)电动葫芦电气原理图
- 格式:pdf
- 大小:4.80 MB
- 文档页数:8


二个电动机的电动葫芦电气控制图第一,控制回路没有接地和短路保护。
第二,在电动葫芦的上下控制中,仅仅依靠控制回路的限位保护好象还不完善,当限位保护的接点发生粘连时,保护就很难起作用了。
建议在葫芦的上下控制的一次回路中在串进一种限位保护,直接就可以断开它(上下)的一次回路。
第三,如果大车的行走距离较远,或者是电机功率较大,还是建议加入热继电器。
1起重电动葫芦使用接触碰撞式行程开关目前,水泥企业电动葫芦多用于包装段吊装大袋成品水泥和设备动力部门吊装相关机械设备。
基本电路见图1所示。
实际使用中我们发现接触式行程开关存在响应速度低、精度差及寿命短等缺陷,需要经常停机更换,给生产带来很多不便。
其损坏的原因归纳起来大致有以下几点:1.1开关密封性差行程动作使得开关无法做到完全密封,撞杆与壳体之间配合缝隙容易进入粉尘使磨损加剧。
特别是在高粉尘环境下。
粉尘会进入开关内部,使开关触点接触不良或卡死。
还有在高湿度(雨天、雾天)和酸碱(酸碱盐气雾)环境下容易造成触点腐蚀或短路。
1.2冲击损伤每一次机械碰撞都将使行程开关承受一次冲击,动作的频繁将会损伤其机械部件,行程开关灵敏度变得越来越差。
1.3温升变形高温环境下,行程开关内部绝缘材料较易变形,变质,由于动、静触点间距离较近,导电材料变形引起触点误动作,安全性能差。
图1电动葫芦基本原理图注意事项:(1)新安装的电动葫芦接三相电源必须严格核对相序,确保是正相序方可合上空气开关。
(2)使用中,当某一功能失效后,使用或维修人员严禁将供电电源接反相来应急操作。
(3)当更换提升/下放或前移/后移电动机后需调换转向时,必须在接触器下方调换电动机电缆中任意两相,或者在电动机接线盒内调相,否则限位开关失去限位保护。
从电动葫芦基本原理图可看出,改变供电相序后,控制回路的KMl变为下放,KM2变为提升,KM3变为后移。
KM4变为前移。
假如这时按下SB2按钮,KM2得电吸合,电动葫芦开始提升,到限位位置后行程开关SQl动作,但此时断开的是下放回路(KMl回路),而非提升回路(KM2回路),这种结果直接导致提升铁索拉断威胁设备及人身安全事故。


电动葫芦电气控制安装与设计一、实训目的1、了解电动葫芦电气控制电路的控制原理。
2、熟悉电动葫芦电气控制电路的控制过程。
3、掌握电动葫芦电气控制电路的接线技能。
4、熟悉电气控制柜及采用线槽布线的布线工艺。
5、熟悉各控制元器件的工作原理及构造。
6、掌握PLC程序编写方法。
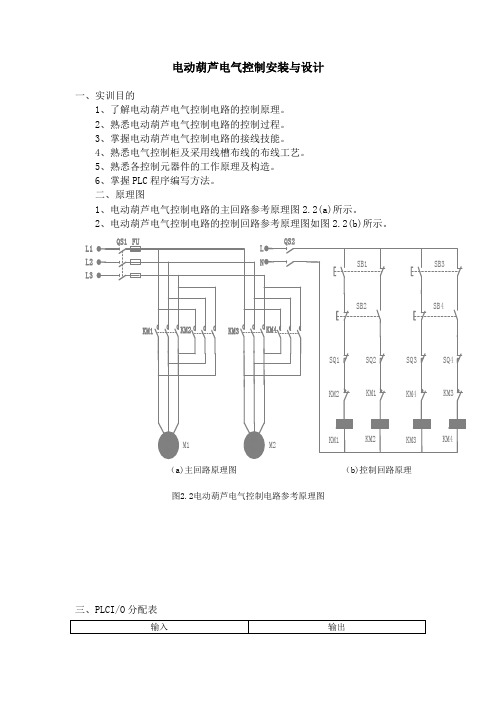
二、原理图1、电动葫芦电气控制电路的主回路参考原理图2.2(a)所示。
2、电动葫芦电气控制电路的控制回路参考原理图如图2.2(b)所示。
L1QS1FUL2L3KM1KM2M 3~M1KM3KM4M3~M2KM1KM2KM2KM1SQ1SQ2SB2SB1KM3KM4KM4KM3SQ3SQ4SB4SB3LQS2N(a)主回路原理图(b)控制回路原理图2.2电动葫芦电气控制电路参考原理图三、PLCI/O分配表输入输出输入继电器输入按钮 作用 输出继电器 输出按钮 作用 X0 SQ4 行程开关 Y0 KM1M1正转X1 SB1 吊钩提升 X2 SB2 吊钩下降 Y1 KM2M1反转X3 SB3 向前移动 X4 SB4 向后移动 Y2 KM3M2正转X5 SQ1 行程开关 X6 SQ2 行程开关 Y3 KM4M2反转X7 SQ3行程开关四、PLC 梯形图五、PLC 硬件接线图X 2X 1X 0X 3X 4X 5X 6X 7C O MY 1Y 2Y 3Y 4C O MS Q 4S B 1S B 2S B 3S B 4S Q 1S Q 2S Q 324VK M 1K M 2K M 3K M 4220V六、实训器材三相异步电动机2台,按钮开关4个,交流接触器4个,熔断器3个,行程开关4个,小型三相断路器2个,连接导线及相关工具若干,FX2N 型三菱PLC 一个。
七、工作原理电动机M1为吊钩升降电动机,用来提升货物,由接触器KM1、KM2进行正反转控制,以实现吊钩升降。
SB1、SB2为吊钩电动机M1的正反向复合启动按钮,正反向接触器KM1、KM2线圈电路间采用复合按钮和接触器双重连锁。

第 章 起重机械电气控制电路6QM 2-5→QM 1-7→SB 5(动断触点)→KM 1线圈→KM 5辅助动断触点→FU 4→L 13),KM 1主触点[4]闭合,总电源通过KM 1主触点[4]给电动机M 1~M 4供电,则可以通过QM 1、QM 2、QM 4来控制电动机M 1、M 2、M 3以及M 4的工作状态,并且此时由于KM 1的动断触点[24]断开,接触器KM 5不能得电,实现连锁,使变幅电动机M 5不能工作。
若是回转电动机M 4工作,不论电动机是正转还是反转,将QM 4由“0”位置于“1”、“2”位,则KM 41或KM 42得电吸合,电动机M 4正转或反转,同时KM 41、KM 42的辅助动断触点[19]断开,确保KM 44[19]不能得电,使YB 4[9]不能得电,确保制动器松闸。
若使M 4停转,则将QM 4由“1”、“2”位置于“0”位,则KM 41、KM 42[20、21]失电释放,其辅助动断触点[19]复位闭合,为KM 44[19]得电做准备,按下点动按钮SB 2[19],则KM 44[19]得电吸合,其主触点[9]闭合,YB 4[9]得电,制动器紧闸,使M 4迅速停转。
关于QM 1对M 1的控制,见图6.2.7。
② 若需要进行变幅操作,首先将QM 5置于“0”位,然后按下启动按钮SB 5[23、24],则接触器KM 5[24]得电吸合并自锁,其主触点[2]闭合,总电源通过KM 5的主触点[2]给变幅电动机M 5供电,则可以通过QM 5来控制M 5的工作状态,并且此时KM 1不能得电,实现连锁,使电动机M 1~M 4不能工作。
YB 5[3]为M 5的电磁制动器,M 5得电时松闸,M 5失电时抱闸。
6.2 起重运输机械的电气控制电路起重运输机械是一种起吊和运输重物的设备,在车间、仓库和流水加工线上得到广泛的应用,对减轻劳动强度,提高生产效率有着重要的作用,是现代化生产中不可缺少的机械设备之一。
用生命经营泉林让泉林造福社会电动葫芦的电气线路图
CD1型电动葫芦的电缆引入器,按原设计共有两种装置,一种是软缆式引入器,另一种是滑轨式引入器,我厂(新乡矿山)只按软缆式一种进行生产,如果使用单位需要滑轨式引入器,可自行改制。
每台电动葫芦带有一个电器控制箱(开关箱),箱内装有两种型号的交流接触器,如
0."5T电动葫芦箱内只有JK
3-05,接线板件2电源直接输。
如控制2T起升电机有CJ0-20B接触器2只、控制运行电机的CJ10-10A接触器2只,控制5T起升电机的是CJ0-40B接触器2只、控制运行电机的CJ0-10A接触器2只,操纵上下升降及左右移动由AK
4控纽控制,如果与单梁起重机配套使用时可控AK
3控制按钮。
电动葫芦的电气线路图
1/ 1。