双重联锁正反转原理
- 格式:ppt
- 大小:2.58 MB
- 文档页数:29

双重联锁正反转控制电路的工作原理一、引言双重联锁正反转控制电路是一种常见的电气控制电路,它可以实现对电机的正反转控制,并且具有很高的安全性。
本文将详细介绍双重联锁正反转控制电路的工作原理。
二、双重联锁正反转控制电路的组成双重联锁正反转控制电路由以下几部分组成:1. 电源:提供电流给整个电路。
2. 控制开关:用于控制电机的正反转,通常采用交流接触器或直流继电器。
3. 限位开关:用于检测机械运动位置,通常采用微动开关或行程开关。
4. 联锁装置:用于保证在某种情况下只有一个方向能够启动,通常采用多级连锁装置。
5. 保护装置:用于保护设备和人员安全,通常采用熔断器、断路器等。
三、双重联锁正反转控制电路的工作原理1. 正转过程当需要使电机正向旋转时,先按下“前进”按钮,此时K1接点闭合,K2接点断开。
然后通过K1接点和限位开关S1接通电源,电机开始正向旋转。
同时,K3接点闭合,K4接点断开,联锁装置起作用,使得“后退”按钮无法按下。
2. 反转过程当需要使电机反向旋转时,先按下“后退”按钮,此时K2接点闭合,K1接点断开。
然后通过K2接点和限位开关S2接通电源,电机开始反向旋转。
同时,K4接点闭合,K3接点断开,联锁装置起作用,使得“前进”按钮无法按下。
3. 停止过程当需要停止电机运行时,在任何状态下按下“停止”按钮即可。
此时所有的控制开关都会打开,并且所有的联锁装置都失效。
四、双重联锁正反转控制电路的特点1. 安全性高:双重联锁正反转控制电路具有多级连锁保护装置,在某种情况下只有一个方向能够启动,从而保证了设备和人员的安全。
2. 操作简便:双重联锁正反转控制电路只需要按下相应的按钮即可实现对电机的正反转控制,并且操作简单易懂。
3. 可靠性高:双重联锁正反转控制电路采用多级联锁装置,从而保证了电路的可靠性和稳定性。
五、总结双重联锁正反转控制电路是一种常见的电气控制电路,它具有安全性高、操作简便、可靠性高等特点。

双重联锁正反转工作原理双重联锁正反转是一种常用于安全控制系统中的工作原理,它能够确保设备在正常运行过程中不发生意外损坏或人员伤害。
本文将详细介绍双重联锁正反转的工作原理及其应用。
一、双重联锁正反转的定义双重联锁正反转是指在设备运行过程中,通过两组联锁装置对设备的正向和反向运动进行控制,从而确保设备的安全性。
它通过对设备的两个方向进行监控和控制,避免了设备在运行过程中发生意外情况。
二、双重联锁正反转的工作原理双重联锁正反转的工作原理可以分为以下几个步骤:1. 设备正向运动:当设备需要正向运动时,首先需要解除反向运动的联锁,确保设备能够正常运行。
在正向运动的过程中,设备的反向运动联锁将被锁定,防止误操作导致设备反向运动。
2. 设备停止:当设备达到预定位置或需要停止时,联锁装置会将设备的电源切断,停止设备的运动。
3. 设备反向运动:当设备需要反向运动时,与正向运动类似,首先需要解除正向运动的联锁,确保设备能够正常运行。
在反向运动的过程中,设备的正向运动联锁将被锁定,防止误操作导致设备正向运动。
4. 设备停止:当设备达到预定位置或需要停止时,联锁装置会将设备的电源切断,停止设备的运动。
通过以上步骤,双重联锁正反转能够确保设备在运行过程中的安全性,有效避免了误操作或设备故障导致的意外情况。
三、双重联锁正反转的应用双重联锁正反转在工业生产中广泛应用于各种设备的控制系统中,特别是对于要求高安全性的设备。
以下是双重联锁正反转的几个具体应用场景:1. 电梯控制系统:电梯是人们日常生活中常见的设备之一,其安全性至关重要。
双重联锁正反转可以确保电梯在运行过程中不会出现故障或意外情况,保证乘客的安全。
2. 输送带系统:在物流行业中,输送带系统用于货物的运输和分拣。
双重联锁正反转可以确保输送带在正常运行过程中不会发生卡滞、断裂等情况,保证物流运输的连续性和安全性。
3. 机械臂系统:机械臂广泛应用于工业生产中,用于自动化生产和加工。

双重联锁的正反转电气控制线路(1)电路组成:主电路、控制电路(2)主要元器件:按钮、低压断路器、交流接触器(3)原理分析正转控制:按下正转按钮SB1→接触器KM1线圈得电→KM1主触头闭合→电动机正转,同时KM1的自锁触头闭合,KM1的互锁触头断开。
反转控制:按下反转按钮SB2→接触器KM1线圈失电→KM1的互锁触头闭合→接触器KM2线圈得电→从而KM2主触头闭合,电动机开始反转,同时KM2的自锁触头闭合,KM2的互锁触头断开。
接触器互锁:为了避免正转和反转两个接触器同时动作造成相间短路,在两个接触器线圈所在的控制电路上加了电气联锁。
即将正转接触器KM1的常闭辅助触头与反转接触器KM2的线圈串联;又将反转接触器KM2的常闭辅助触头与正转接触器KM1的线圈串联。
这样,两个接触器互相制约,使得任何情况下不会出现两个线圈同时得电的状况,起到保护作用。
按钮互锁:复合启动按钮SB1,SB2也具有电气互锁作用。
SB1的常闭触头串接在KM2线圈的供电线路上,SB2的常闭触头串接在KM1线圈的供电线路上,这种互锁关系能保证一个接触器断电释放后,另一个接触器才能通电动作,从而避免因操作失误造成电源相间短路。
按钮和接触器的复合互锁使电路更安全可靠。
1、双重联锁的正反转控制线路原理图:由于电机正反转的实现是通过改变电源相序来实现的。
因此,我们采用两个交流接触器来进行换相,以达到控制电机的正转和反转的目的。
用两个按钮分别实现正转和反转的控制,并把它们的常闭触点分别放在对方的控制回路里,达到联锁的目的。
线路工作原理图如下:2、分析双重联锁的正反转控制的工作原理:合上电源开关正转启动:按下启动按钮SB1,KM1线圈得电,KM1主触头闭合,电机正转转动,同时KM1辅助触点自锁,继续线圈供电。
同时联锁触点KM1常闭触点断开(禁止KM2 线圈得电,对反转进行联锁),电机继续正转转动。
线路启动回路:L1→QS→FU2→FR→SB3→SB1→KM2常闭→KM1线圈→L2反转启动:按下启动按钮SB2,KM1线圈断电,KM1主触头断开,同时KM1自锁触点也断开,电机正转停止转动。

双重联锁正反转控制电路原理引言:在工业自动化控制系统中,正反转控制电路被广泛应用于电机的启停和正反转操作。
为了确保操作安全可靠,人们发展了一种双重联锁正反转控制电路,该电路能够在电机正反转操作中实现双重保护,避免出现不安全的情况。
一、双重联锁正反转控制电路的工作原理双重联锁正反转控制电路的工作原理是基于电路中的两组联锁开关,分别用于正转和反转操作。
在正转操作时,反转联锁开关断开,而在反转操作时,正转联锁开关断开。
这样一来,无论是正转还是反转操作,都会将另一组联锁开关断开,从而实现双重保护。
二、具体电路原理双重联锁正反转控制电路由电源、电机、正转联锁开关、反转联锁开关和控制继电器组成。
其工作原理如下:1. 正转操作:当需要进行正转操作时,正转联锁开关闭合,电流从电源经过正转联锁开关流向电机,电机开始正转运行。
同时,反转联锁开关断开,防止反转操作同时进行。
2. 反转操作:当需要进行反转操作时,反转联锁开关闭合,电流从电源经过反转联锁开关流向电机,电机开始反转运行。
同时,正转联锁开关断开,防止正转操作同时进行。
3. 停止操作:当需要停止电机运行时,正转联锁开关和反转联锁开关同时断开,电流无法通过联锁开关流向电机,电机停止运行。
双重联锁正反转控制电路实现了正转和反转操作的双重保护。
无论是正转还是反转操作,只有一组联锁开关闭合,另一组联锁开关必然断开,从而保证了电机不会同时进行正反转操作。
三、双重联锁正反转控制电路的应用双重联锁正反转控制电路广泛应用于需要实现电机正反转操作的场合,如电动机械、输送带、风机等。
通过使用双重联锁正反转控制电路,可以有效避免因误操作或故障引起的意外事故,保障人员和设备的安全。
四、总结双重联锁正反转控制电路是一种可靠的电机控制方案。
通过使用两组联锁开关,可以实现对电机正反转操作的双重保护,确保操作安全可靠。
该电路已广泛应用于工业自动化控制系统中,对于电机正反转操作起到了重要作用。

电机的正反转双重互锁原理电机的正反转双重互锁原理是通过控制电机的运行方向,实现对电机的正反转的控制和互锁保护。
该原理通常应用于一些需要正反转操作且对电机运行状态有较高要求的领域,如工业生产线、机械设备等。
电机的正反转双重互锁原理主要包括以下几个方面:1. 控制回路:电机的正反转控制通常由一个控制回路实现,该回路包括控制器、电动机、电源等组成。
控制器通过电路中的开关、继电器等元器件来控制电机的正反转。
当需要使电机正转时,控制器发送正转信号,通过将正转回路切入电源,断开反转回路,使电机正转;反之,当需要使电机反转时,控制器发送反转信号,切入反转回路,断开正转回路,使电机反转。
2. 互锁电路:为了确保电机的正反转操作的安全性和稳定性,通常会在控制回路中增加互锁电路,实现对电机运行状态的监测。
互锁电路常常通过位置、速度、电流等参数来监测电机的运行状态。
在电机正转时,互锁电路会实时检测电机的位置、速度等参数,如果电机达到某个设定的条件,互锁电路将会触发,将控制回路中的正转信号切断,从而防止电机反转时发生冲突;同样,当电机反转时,互锁电路也会实时检测电机的参数,触发反转信号切断,以避免电机正转时发生意外。
3. 双重监控:除了互锁电路的监测,现代电机控制系统通常也会增加另一种监控方式,即编程控制。
编程控制是通过预设程序来控制电机的运行,通过编程可以自定义电机的运行模式、速度、时间等参数。
编程控制通常由控制器的人机界面进行操作,并通过控制器、编程器等设备将程序上传至电机的控制器中。
编程控制可以在互锁电路的基础上更细致地对电机的运行状态进行监测,并在需要时作出相应的操作,例如当电机运行超时时,程序可以预设停止电机的运行,并通过提示方式通知操作人员。
总结而言,电机的正反转双重互锁原理是通过控制回路、互锁电路和双重监控来实现对电机正反转的控制和保护。
这种原理在电机控制系统中广泛应用,可以确保电机的安全运行,并满足不同应用领域对电机运行状态的要求。
电机双重联锁正反转控制
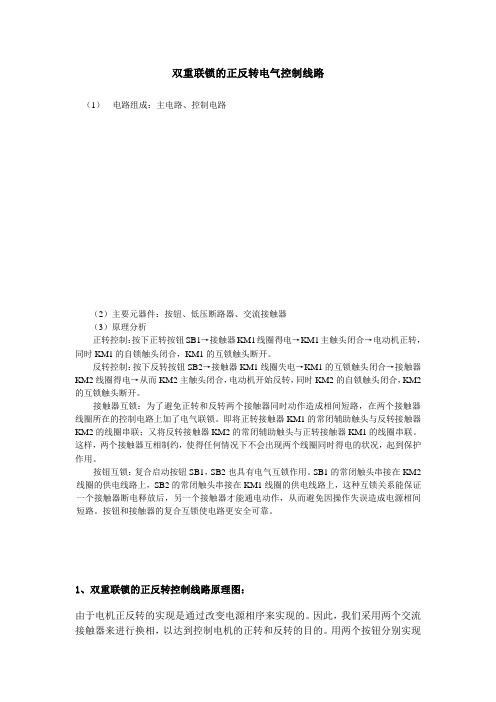
图三、双重联锁(按钮、接触器)正反转控制电路原理图
QS
L1 L2 L3
U11
V11
W11
FU1
FR
3~
PE
M
U
V
W
U12
U13
V12
V13
W13
W13
KM1
KM2
FU2
1
2
3
FR
SB3
KM2
KM1
KM1
KM2
KM1
KM2
SB1
SB2
4
5
6
7
8
9
紧急停止
一、元器件清单
变压器、交流断路器、接触式继电器、热过载继电器、按钮开关、三相交流电动机、导线若干
二、工作原理分析:
A、正转控制:
按下SB1 SB1常闭触头先断开(对KM2实现联锁)
SB1常开触头闭合KM1线圈得电
KM1自锁触头闭合(实现自锁)电机M启动连续正转工作
KM1主触头闭合
KM1联锁触头断开(对KM2实现联锁)
B、反转控制:
KM1自锁触头断开(解除自锁)M失电,停止正转SB2KM1线圈失电KM1主触头断开
按下SB2 KM1联锁触头闭合KM2线圈得电
SB2
KM2自锁触头闭合(实现自锁)电机M启动连续反转工作
KM2主触头闭合
KM2联锁触头断开(对KM1实现联锁)
C、停止控制:
按下SB3,整个控制电路失电,接触器各触头复位,电机M失电停转;。
双重联锁的正反转电气控制线路(1) 电路组成:主电路、控制电路≡ I双重莊锁的正反转电气控制⅛⅛路(2)主要元器件:按钮、低压断路器、交流接触器(3)原理分析正转控制:按下正转按钮SB1 →接触器KM1线圈得电→ KM1主触头闭合→电动机正转,同时KM1的自锁触头闭合,KM1的互锁触头断开。
反转控制:按下反转按钮SB2→接触器KM1线圈失电→ KM1的互锁触头闭合→接触器 KM2线圈得电→从而 KM2主触头闭合,电动机开始反转,同时KM2的自锁触头闭合,KM2 的互锁触头断开。
接触器互锁:为了避免正转和反转两个接触器同时动作造成相间短路,在两个接触器线圈所在的控制电路上加了电气联锁。
即将正转接触器KM1的常闭辅助触头与反转接触器KM2的线圈串联;又将反转接触器 KM2的常闭辅助触头与正转接触器 KM1的线圈串联。
这样,两个接触器互相制约,使得任何情况下不会出现两个线圈同时得电的状况,起到保护作用。
按钮互锁:复合启动按钮SB1 , SB2也具有电气互锁作用。
SB1的常闭触头串接在 KM2 线圈的供电线路上,SB2的常闭触头串接在 KM1线圈的供电线路上,这种互锁关系能保证一个接触器断电释放后,另一个接触器才能通电动作,从而避免因操作失误造成电源相间短路。
按钮和接触器的复合互锁使电路更安全可靠。
1、双重联锁的正反转控制线路原理图:由于电机正反转的实现是通过改变电源相序来实现的。
因此,我们采用两个交流 接触器来进行换相,以达到控制电机的正转和反转的目的。
用两个按钮分别实现 正转和反转的控制,并把它们的常闭触点分别放在对方的控制回路里, 达到联锁 的目的。
线路工作原理图如下:FU22、分析双重联锁的正反转控制的工作原理: 合上电源开关正转启动:按下启动按钮SB1, KM1线圈得电,KM1主触头闭合,电机正转转动, 同时KM1辅助触点自锁,继续线圈供电。
同时联锁触点KM1常闭触点断开(禁止 KM2线圈得电,对反转进行联锁),电机继续正转转动。
双重联锁正反转原理双重联锁正反转的原理基于两个条件的同时满足。
首先,机械系统必须处于一种特定的状态,例如停止状态、断电状态或者其他需要进行正反转前的特定准备状态。
其次,必须满足特定的操作序列,也就是一系列预定的动作,才能进行正反转。
在实现双重联锁正反转的原理中,通常会使用以下几种组合元件:1.继电器:继电器是一种控制电流的开关设备。
在双重联锁正反转中,继电器可以通过控制电流的通断,实现切换机械系统的运动状态。
2.限位开关:限位开关是一种机械触发器,当机械系统达到特定的位置时,限位开关会触发,触发的信号可以通过继电器来控制机械系统的状态。
3.传感器:传感器通常用来检测一些特定的条件,例如机械系统的位置、速度、温度等。
通过传感器的信号,可以判断机械系统是否满足进行正反转的条件。
基于以上组合元件,下面是双重联锁正反转的实现原理:1.确定初始状态:首先要确定机械系统的初始状态,例如停止状态、断电状态等。
2.检测条件:通过传感器或限位开关检测机械系统的状态,确保其满足进行正反转的条件。
3.控制信号:根据检测到的条件,继电器产生相应的控制信号,控制机械系统的状态。
4.合理的时间延迟:为了确保机械系统在进行正反转时的安全性,通常会加入一定的时间延迟,防止误操作。
5.正反转操作:在满足条件和时间延迟的情况下,机械系统可以按照预定的操作序列进行正反转。
6.监测机械系统状态:在机械系统正反转之后,通过传感器或限位开关持续监测机械系统的状态,确保其达到预期的正反转状态。
通过双重联锁正反转原理的应用,可以确保机械系统在特定情况下不会发生意外的正反转,从而提高了机械系统的安全性和可靠性。
这种安全装置在许多行业中都得到了广泛的应用,例如电梯、机床、加工设备等。