电气控制-双重连锁的正反转控制线路(原理分析)
- 格式:doc
- 大小:48.00 KB
- 文档页数:1
电动机双重联锁正反转电路能源管理服务中心石如东2015年6月26日一、电路特点电动机双重联锁正反转控制电路,电动机双重联锁正反转控制电路,由按钮联锁和接触器联锁综合组成。
是正反转控制电路中,电气安全系数最高的控制电路。
可以直接完成电动机正反转换向,不用先按停止按钮SB3。
电路中:KM1---正转接触器;KM2---反转接触器;SB1---正转启动按钮;SB2---反转启动按钮;SB3---停止按钮;FR----热继电器;QS----空气断路器。
二、电路功能简述启动停止:按下正转启动按钮SB1时,电动机正向启动;按下反转启动按钮SB2时,电动机反向启动;按下停止按钮SB3时,电动机停止运行;过载保护:热继电器FR。
短路保护:空气开关QS。
失压欠压保护:接触器线圈KM。
正反转误动作短路保护:SB1、KM1和SB2、KM2组成双重联锁保护电路。
三、工作原理简述正转时:按下正转启动按钮SB1→SB1常闭触点断开反转接触器KM2线圈回路完成互锁→常开触点接通正转接触器KM1线圈回路→KM1得电吸合→找 黑 驴 绘 图KM1常闭辅助触点切断KM2线圈回路完成互锁→KM1常开辅助触点自锁→KM1主触头接通电动机正转供电回路→电动机M 正向运转。
反转时:按下反转启动按钮SB2→SB2常闭触点断开正转接触器KM1线圈回路完成互锁→常开触点接通反转接触器KM2线圈回路→KM2得电吸合→KM2常闭辅助触点切断KM1线圈回路完成互锁→KM2常开辅助触点自锁→KM2主触头接通电动机反转供电回路→电动机M 反向运转。
停止时:按下停止按钮SB3→控制回路断电→接触器释放→切墩电动机主回路→电动机停止运转。
过载保护:热继电器FR 受热元件串接于主回路中,常闭触点串接于控制回路中,当电动机过载电流增大时,热元件变形推动常闭触点断开控制回路。
短路保护:短路电流触发空气开关QS 内部的感应器件,空开自动跳闸。
失压欠压保护:电源电压突然断电或电压不足时,接触器KM 线圈磁力消失或不足,接触器释放。
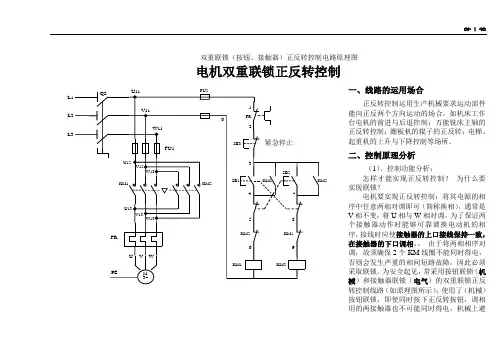
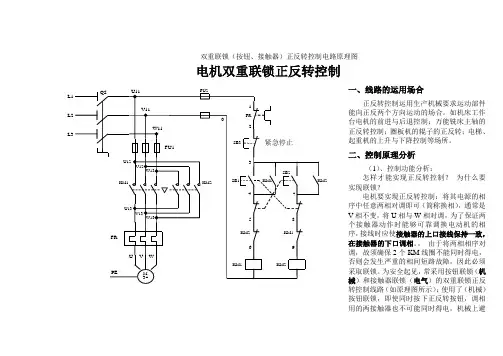
双重联锁(按钮、接触器)正反转控制电路原理图电机双重联锁正反转控制一、线路的运用场合Array正反转控制运用生产机械要求运动部件能向正反两个方向运动的场合。
如机床工作台电机的前进与后退控制;万能铣床主轴的正反转控制;圈板机的辊子的正反转;电梯、起重机的上升与下降控制等场所。
二、控制原理分析(1)、控制功能分析:怎样才能实现正反转控制?为什么要实现联锁?电机要实现正反转控制:将其电源的相序中任意两相对调即可(简称换相),通常是V相不变,将U相与W相对调,为了保证两个接触器动作时能够可靠调换电动机的相序,接线时应使接触器的上口接线保持一致,在接触器的下口调相。
由于将两相相序对调,故须确保2个KM线圈不能同时得电,否则会发生严重的相间短路故障,因此必须采取联锁。
为安全起见,常采用按钮联锁(机械)和接触器联锁(电气)的双重联锁正反转控制线路(如原理图所示);使用了(机械)按钮联锁,即使同时按下正反转按钮,调相用的两接触器也不可能同时得电,机械上避免了相间短路。
另外,由于应用的(电气)接触器间的联锁,所以只要其中一个接触器得电,其长闭触点(串接在对方线圈的控制线路中)就不会闭合,这样在机械、电气双重联锁的应用下,电机的供电系统不可能相间短路,有效地保护的电机,同时也避免在调相时相间短路造成事故,烧坏接触器。
(2)、工作原理分析:A、正转控制:按下SB1常闭触头先断开(对KM2实现联锁)SB1常开触头闭合KM1线圈得电KM1电机M启动连续正转工作KM1KM1联锁触头断开(对KM2实现联锁)B、反转控制:M失电,停止正转SB2按下线圈得电SB2KM2电机M启动连续反转工作KM2主触头闭合KM2联锁触头断开(对KM1实现联锁)C、停止控制:按下SB3,整个控制电路失电,接触器各触头复位,电机M失电停转;三、双重联锁正反转控制线路的优点接触器联锁正反转控制线路虽工作安全可靠但操作不方便;而按钮联锁正反转控制线路虽操作方便但容易产生电源两相短路故障。
三相异步电动机双重联锁正反转工作原理三相异步电动机是一种常见的电动机类型,它通常用于工业生产中的驱动设备。
双重联锁正反转是一种常见的控制方式,能够有效地实现电动机的正反转操作并确保其安全运行。
下面将详细介绍三相异步电动机双重联锁正反转的工作原理。
一、三相异步电动机的基本原理三相异步电动机是由三个相互连接的线圈组成的,当这些线圈连接到三相电源上时,会产生旋转磁场。
在电动机转子中也有线圈,当旋转磁场通过转子线圈时,会在转子中产生感应电动势,从而产生转矩使电动机转动。
这就是三相异步电动机的基本原理。
二、双重联锁正反转的实现1. 正转控制在进行正转操作时,需要同时满足以下两个条件:- 使电动机的两相交叉点接通- 使电动机的另一相与两相交叉点不接通实现这一目的通常需要使用接触器或继电器来进行控制,通过控制接点的通断状态来实现不同相之间的连接。
2. 反转控制在进行反转操作时,需要满足以下两个条件:- 使电动机的两相交叉点接通- 使电动机的另一相与两相交叉点不接通与正转控制类似,反转控制也需要使用接触器或继电器来实现不同相之间的连接和断开。
三、双重联锁的设计原则在实际的工程设计中,双重联锁正反转控制需要满足以下设计原则:- 保证正反转过程中,电动机不会出现同时通电的情况,避免损坏电机和负载设备。
- 确保在切换正反转时不会产生意外的启动或停止动作,保证操作人员的安全。
四、双重联锁的意义和应用双重联锁正反转控制系统能够确保电动机在进行正反转操作时稳定、可靠地工作,并且能够确保操作人员的安全。
在需要频繁进行正反转操作的设备中,双重联锁控制系统应用广泛,如起重设备、提升机、输送机等。
五、双重联锁正反转工作原理分析双重联锁正反转控制系统能够有效地避免电动机同时通电或在切换方向时产生意外运行的现象。
通过控制接触器或继电器的通断状态,可以实现对电动机不同相之间的电气连接和断开,从而实现正反转控制。
双重联锁原理能够保证控制系统的稳定性和可靠性,确保电动机能够安全地进行正反转操作。
双重联锁正反转控制电路的工作原理一、引言双重联锁正反转控制电路是一种常见的电气控制电路,它可以实现对电机的正反转控制,并且具有很高的安全性。
本文将详细介绍双重联锁正反转控制电路的工作原理。
二、双重联锁正反转控制电路的组成双重联锁正反转控制电路由以下几部分组成:1. 电源:提供电流给整个电路。
2. 控制开关:用于控制电机的正反转,通常采用交流接触器或直流继电器。
3. 限位开关:用于检测机械运动位置,通常采用微动开关或行程开关。
4. 联锁装置:用于保证在某种情况下只有一个方向能够启动,通常采用多级连锁装置。
5. 保护装置:用于保护设备和人员安全,通常采用熔断器、断路器等。
三、双重联锁正反转控制电路的工作原理1. 正转过程当需要使电机正向旋转时,先按下“前进”按钮,此时K1接点闭合,K2接点断开。
然后通过K1接点和限位开关S1接通电源,电机开始正向旋转。
同时,K3接点闭合,K4接点断开,联锁装置起作用,使得“后退”按钮无法按下。
2. 反转过程当需要使电机反向旋转时,先按下“后退”按钮,此时K2接点闭合,K1接点断开。
然后通过K2接点和限位开关S2接通电源,电机开始反向旋转。
同时,K4接点闭合,K3接点断开,联锁装置起作用,使得“前进”按钮无法按下。
3. 停止过程当需要停止电机运行时,在任何状态下按下“停止”按钮即可。
此时所有的控制开关都会打开,并且所有的联锁装置都失效。
四、双重联锁正反转控制电路的特点1. 安全性高:双重联锁正反转控制电路具有多级连锁保护装置,在某种情况下只有一个方向能够启动,从而保证了设备和人员的安全。
2. 操作简便:双重联锁正反转控制电路只需要按下相应的按钮即可实现对电机的正反转控制,并且操作简单易懂。
3. 可靠性高:双重联锁正反转控制电路采用多级联锁装置,从而保证了电路的可靠性和稳定性。
五、总结双重联锁正反转控制电路是一种常见的电气控制电路,它具有安全性高、操作简便、可靠性高等特点。
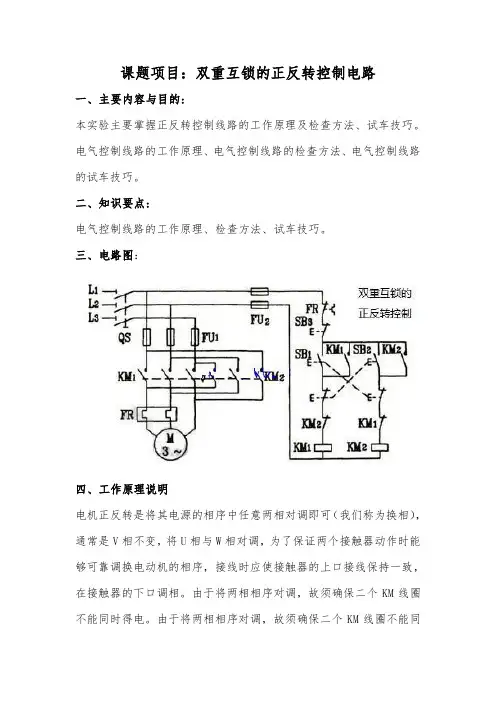
课题项目:双重互锁的正反转控制电路一、主要内容与目的:本实验主要掌握正反转控制线路的工作原理及检查方法、试车技巧。
电气控制线路的工作原理、电气控制线路的检查方法、电气控制线路的试车技巧。
二、知识要点:电气控制线路的工作原理、检查方法、试车技巧。
三、电路图:四、工作原理说明电机正反转是将其电源的相序中任意两相对调即可(我们称为换相),通常是V相不变,将U相与W相对调,为了保证两个接触器动作时能够可靠调换电动机的相序,接线时应使接触器的上口接线保持一致,在接触器的下口调相。
由于将两相相序对调,故须确保二个KM线圈不能同时得电。
由于将两相相序对调,故须确保二个KM线圈不能同时得电,否则会发生严重的相间短路故障,因此必须采取联锁。
为安全起见,常采用按钮联锁(机械)与接触器联锁(电气)的双重联锁正反转控制线路五、工具准备:1、电拖实训台及电动机2、数字万用表3、十字螺丝刀及剥线钳4、导线若干六、操作步骤及数据分析Ⅰ、常用的电动机正反转控制电路一、倒顺转换开关控制的电动机正反转控制电路二、电气互锁的正反转控制电路三、按钮电气双重联锁的正反转控制电路Ⅱ、照图接线在按钮电气双重互锁的正反转控制电路的原理图上,按规定标好线号,画出互联接线图,接线时应注意以下几个问题:一、主电路从QS到接线端子板之间的走线方式与单向启动线路完全相同。
两只接触器主触点端子之间的连线可以直接在主触点高度的平面内走线,不必向下贴近安装底板,以减少导线的弯折。
二、做辅助电路接线时,可先接好两只接触器的自锁线路,然后做按钮联锁线,核查无误后,最后做辅助触头联锁线。
每做一条线,就在图上标一个记号,随做随核查,反复核对,避免漏接、错接和重复接线。
Ⅲ、检查线路首先对照原理图、接线图逐线核查。
重点检查主电路两只接触器之间的换相线,辅助电路的自锁、按钮互锁及接触器辅助触点的互锁线路,特别注意自锁触点用接触器自身的常开触点,互锁触点是将自身的常闭触点串入对方的线圈回路。
双重联锁(按钮、接触器)正反转控制电路原理图电机双重联锁正反转控制一、线路的运用场合Array正反转控制运用生产机械要求运动部件能向正反两个方向运动的场合。
如机床工作台电机的前进与后退控制;万能铣床主轴的正反转控制;圈板机的辊子的正反转;电梯、起重机的上升与下降控制等场所。
二、控制原理分析(1)、控制功能分析:怎样才能实现正反转控制?为什么要实现联锁?电机要实现正反转控制:将其电源的相序中任意两相对调即可(简称换相),通常是V相不变,将U相与W相对调,为了保证两个接触器动作时能够可靠调换电动机的相序,接线时应使接触器的上口接线保持一致,在接触器的下口调相。
由于将两相相序对调,故须确保2个KM线圈不能同时得电,否则会发生严重的相间短路故障,因此必须采取联锁。
为安全起见,常采用按钮联锁(机械)和接触器联锁(电气)的双重联锁正反转控制线路(如原理图所示);使用了(机械)按钮联锁,即使同时按下正反转按钮,调相用的两接触器也不可能同时得电,机械上避免了相间短路。
另外,由于应用的(电气)接触器间的联锁,所以只要其中一个接触器得电,其长闭触点(串接在对方线圈的控制线路中)就不会闭合,这样在机械、电气双重联锁的应用下,电机的供电系统不可能相间短路,有效地保护的电机,同时也避免在调相时相间短路造成事故,烧坏接触器。
(2)、工作原理分析:A、正转控制:按下SB1常闭触头先断开(对KM2实现联锁)SB1常开触头闭合KM1线圈得电KM1电机M启动连续正转工作KM1KM1联锁触头断开(对KM2实现联锁)B、反转控制:M失电,停止正转SB2按下线圈得电SB2KM2电机M启动连续反转工作KM2主触头闭合KM2联锁触头断开(对KM1实现联锁)C、停止控制:按下SB3,整个控制电路失电,接触器各触头复位,电机M失电停转;三、双重联锁正反转控制线路的优点接触器联锁正反转控制线路虽工作安全可靠但操作不方便;而按钮联锁正反转控制线路虽操作方便但容易产生电源两相短路故障。
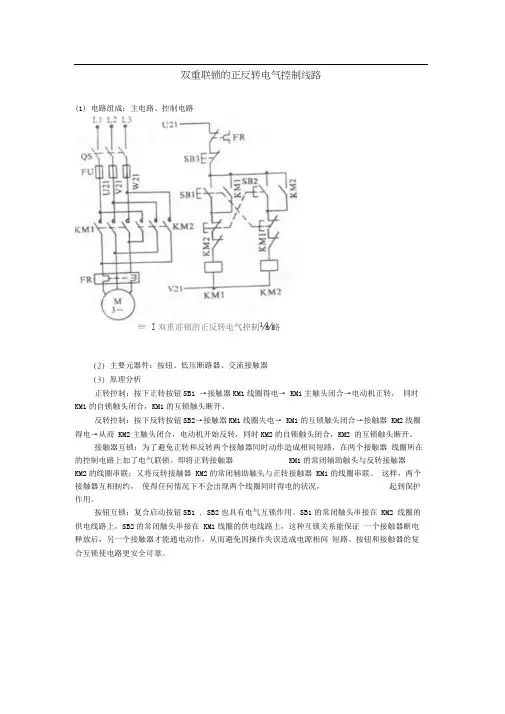
双重联锁的正反转电气控制线路(1) 电路组成:主电路、控制电路≡ I双重莊锁的正反转电气控制⅛⅛路(2)主要元器件:按钮、低压断路器、交流接触器(3)原理分析正转控制:按下正转按钮SB1 →接触器KM1线圈得电→ KM1主触头闭合→电动机正转,同时KM1的自锁触头闭合,KM1的互锁触头断开。
反转控制:按下反转按钮SB2→接触器KM1线圈失电→ KM1的互锁触头闭合→接触器 KM2线圈得电→从而 KM2主触头闭合,电动机开始反转,同时KM2的自锁触头闭合,KM2 的互锁触头断开。
接触器互锁:为了避免正转和反转两个接触器同时动作造成相间短路,在两个接触器线圈所在的控制电路上加了电气联锁。
即将正转接触器KM1的常闭辅助触头与反转接触器KM2的线圈串联;又将反转接触器 KM2的常闭辅助触头与正转接触器 KM1的线圈串联。
这样,两个接触器互相制约,使得任何情况下不会出现两个线圈同时得电的状况,起到保护作用。
按钮互锁:复合启动按钮SB1 , SB2也具有电气互锁作用。
SB1的常闭触头串接在 KM2 线圈的供电线路上,SB2的常闭触头串接在 KM1线圈的供电线路上,这种互锁关系能保证一个接触器断电释放后,另一个接触器才能通电动作,从而避免因操作失误造成电源相间短路。
按钮和接触器的复合互锁使电路更安全可靠。
1、双重联锁的正反转控制线路原理图:由于电机正反转的实现是通过改变电源相序来实现的。
因此,我们采用两个交流 接触器来进行换相,以达到控制电机的正转和反转的目的。
用两个按钮分别实现 正转和反转的控制,并把它们的常闭触点分别放在对方的控制回路里, 达到联锁 的目的。
线路工作原理图如下:FU22、分析双重联锁的正反转控制的工作原理: 合上电源开关正转启动:按下启动按钮SB1, KM1线圈得电,KM1主触头闭合,电机正转转动, 同时KM1辅助触点自锁,继续线圈供电。
同时联锁触点KM1常闭触点断开(禁止 KM2线圈得电,对反转进行联锁),电机继续正转转动。
双重联锁正反转原理双重联锁正反转的原理基于两个条件的同时满足。
首先,机械系统必须处于一种特定的状态,例如停止状态、断电状态或者其他需要进行正反转前的特定准备状态。
其次,必须满足特定的操作序列,也就是一系列预定的动作,才能进行正反转。
在实现双重联锁正反转的原理中,通常会使用以下几种组合元件:1.继电器:继电器是一种控制电流的开关设备。
在双重联锁正反转中,继电器可以通过控制电流的通断,实现切换机械系统的运动状态。
2.限位开关:限位开关是一种机械触发器,当机械系统达到特定的位置时,限位开关会触发,触发的信号可以通过继电器来控制机械系统的状态。
3.传感器:传感器通常用来检测一些特定的条件,例如机械系统的位置、速度、温度等。
通过传感器的信号,可以判断机械系统是否满足进行正反转的条件。
基于以上组合元件,下面是双重联锁正反转的实现原理:1.确定初始状态:首先要确定机械系统的初始状态,例如停止状态、断电状态等。
2.检测条件:通过传感器或限位开关检测机械系统的状态,确保其满足进行正反转的条件。
3.控制信号:根据检测到的条件,继电器产生相应的控制信号,控制机械系统的状态。
4.合理的时间延迟:为了确保机械系统在进行正反转时的安全性,通常会加入一定的时间延迟,防止误操作。
5.正反转操作:在满足条件和时间延迟的情况下,机械系统可以按照预定的操作序列进行正反转。
6.监测机械系统状态:在机械系统正反转之后,通过传感器或限位开关持续监测机械系统的状态,确保其达到预期的正反转状态。
通过双重联锁正反转原理的应用,可以确保机械系统在特定情况下不会发生意外的正反转,从而提高了机械系统的安全性和可靠性。
这种安全装置在许多行业中都得到了广泛的应用,例如电梯、机床、加工设备等。
电动机双重互锁正反转控制电路图文详解今天学习三相异步电动机双重互锁正反转控制电路。
互锁是实际运行中经常使用的功能,有时也叫联锁。
共有三个任务:掌握实现电动机反转的方法;掌握双重互锁正反转控制电路组成;理解接触器、按钮双重互锁正反转控制电路工作原理。
在实际生产中,有的设备需要生产机械的运动部件能向正反两个方向运动,就要求电动机能实现正反转控制,如何实现电动机反转呢?在三相运转时,L1接入电动机U相,L2接入电动机V相,L3接入电动机W相,当改变通入电动机定子绕组的三相电源相序,即把接入电动机三相电源中的任意两相对调接线时,电动机就可以反转。
因此,我们把L1接入W相,L3接入U相,L2不变,L1和L3两相对调接线,实现了电动机反转。
正反转控制使电动机朝两个方向转动,需要两个交流接触器进行控制。
因此在连续运行控制电路上,增加控制反向运转交流接触器KM2。
三相电源通过KM2把L1、L3两相对调接入电动机,L1接入W相,L2接入V相,L3接入U相,通过控制KM1和KM2交替工作,改变电源接入电动机的相序来实现电动机的正反转控制。
实际接线时需要注意,KM1和KM2在进线侧和出线侧换相的接线顺序。
如何控制KM1和KM2交替工作来实现正反转呢?可以把两个连续运行控制电路合并起来控制KM1、KM2,分别按下SB1和SB2可以实现电动机正转和反转,按下SB3停止。
但如果操作失误,同时按下SB1和SB2,由于KM1、KM2主触点同时闭合,主电路会出现短路故障。
因此,电路需要互锁控制,互锁是指两个及以上对象之间相互制约的关系。
如果其中一个对象动作了,那么另外一个对象就不能够动作。
例如,电动机的正反转。
当电动机正转的时候,若误操作按下反转按钮,电动机仍然不能反转。
因此,在此电路上增加了按钮互锁和接触器互锁。
按钮互锁就是把SB1、SB2复合按钮的动断触点分别串接到对方的控制电路中,其中虚线表示复合按钮的电气互锁,接触器互锁,就是把KM1、KM2的动断辅助触点分别串接到对方的线圈线路中,起到了双重互锁的作用。
实验四 三相异步电动机按钮接触器双重联锁正反转控制线路一.概述生产过程中,生产机械的运动部件往往要求能进行正反方向的运动,这就是拖动惦记能作正反向旋转。
由电机原理可知,将接至电机的三相电源进线中的任意两相对调,即可改变电机的旋转方向。
但为了避免误动作引起电源相间短路,往往在这两个相反方向的单相运行线路中加设必要的机械及电气互锁。
按照电机正反转操作顺序的不同,分别有“正—停—反”和“正—反—停”两种控制线路。
对于“正—停—反”控制线路,要实现电机有“正转—反转”或“反转—正转”的控制,都必须按下停止按钮,再进行方向起动。
然而对于生产过程中要求频繁的实现正反转的电机,为提高生产效率,减少辅助工时,往往要求能直接实现电机正反转控制。
图6是接触器和按钮双重联锁的三相异步电动机正反转控制线路。
起动时,合上漏电断路器及空气开关QF ,引入三相电源。
按下起动按钮SB2,接触器KM1的线圈通电,主触头KM1闭合且线圈KM1通过与开关SB2常开触点并联的辅助常开触点KM1实现自锁,同时通过按钮和接触器形成双重互锁。
电动机正转运行。
当按下按钮开关SB3时,接触器KM2的线圈通电,其主触头KM2闭合且线圈KM2通过与开关SB3的常开触点并联的辅助常开触点KM2实现自锁。
同时与接触器KM1互锁的常闭触点都断开,使接触器KM1断电释放。
电动机反转运行。
要使电动机停止运行,按下开关SB1即可。
FR1KM1KM2KM1KM2KM1NL3L2L1QFKM2L KM2FU2FU2SB1SB2SB2SB3SB3图6二.实验目的1.掌握三相鼠笼式异步电动机正反转的工作原理、接线方式及操作方法。
2.掌握机械及电气互锁的连接方法及其在控制线路中所起的作用。
3.掌握按钮和接触器双重互锁控制的三相异步电动机正反转的控制线路。
三.实验设备四.实验内容双重联锁控制的三相异步电机正反转控制。
五.实验步骤1.检查各实验设备外观及质量是否良好。
2.按图6三相鼠笼异步电动机接触器和按钮开关双重互锁控制正反转控制线路进行正确接线,先接主回路,再接控制回路。