LHB03有线电子手轮说明书
- 格式:pdf
- 大小:2.15 MB
- 文档页数:15

手簿X3操作1开机按电源键打开手簿X3。
2手簿蓝牙连接主机点击window窗口进入窗口界面工程菜单击上下找到蓝牙管理进入蓝牙管理界面搜索主机编码选择要连接主机的编码点击连接(主机蓝牙灯已亮)。
3手簿遥控主机工作模式点击仪器设置进入仪器设置界面(移动站设置、基准站设置、主机模式设置)点击主机模式设置进入主机模式设置界面(主机工作模式、主机静态设置、主机数据链设置)移动站设置选择主机工作模式【移动站】点击确定,返回主机模式设置界面移动站电台设置主机模式设置界面选择电台点击确定,然后返回工程菜单点击配置选择电台设置将电台的通道改为相应的通道点击切换退出进入工程菜单界面(查看电台通道、电台信号)移动站网络设置主机模式设置界面选择网络然后返回工程菜单点击配置进入网络设置点击增加(或点击编辑因为该网络参数已经设置好了)进入网络参数设置界面点击获取接入点直到界面出现(获取源列表成功)点击确定返回网络参数设置界面选择相应的接点击确定进入网络读取界面(等到成功)点击链接等所有的灯变绿之后点击确定点击确定(返回工程菜单界面查看网络及网络信号)基准站设置在主机模式设置界面点选【基站】点击确定,返回主机模式设置界面基准站内置电台设置主机模式设置界面选择电台点击确定,返回仪器设置界面点击基准站设置进入基准站设置界面填写相关参数然点击配置将电台的通道改为相应的通道点击切换退出进入工程菜单界面基准站外挂电台设置选择主机数据链设置返回主机模式设置界面,退出进入工程菜单界面。
4新建工程在工程菜单界面点击工程选择SD卡、输入工程名(一般以日期)确定;返回工程菜单界面点击配置选择工程设置在工程设置界面输入天线高、选择杆高点击确定;返回工程菜单界面点击配置坐标系统配置坐标系统选择编辑界面点击增加(或点击编辑、或点选已有的坐标文件再确定)输入参数系统名称、椭球名、中央子午线、以及四参数和七参数5求参数单点校正在工程菜单界面选择校正向导选择基站架在未知点上(如果基站在已知点上则选择基站架在已知点上下一步再输入基站的坐标与高程)下一步改点的坐标与高程(或从文件中调用)使水泡居中确定求参数选择求转换参数进入求转换参数的界面,点击增加输入点名及坐标、高程(或从坐标管理库调用选择需要选择的点再点击确定)点击确定如果是从坐标库选点(点选坐标管理选点在坐标管理库中选择所需的点再点击确定)如果是读取当前点坐标(也就是采集当下该点的坐标设置好天线高)如果是直接直接输入大地坐标(就是在手簿上输入相应的经度、纬度、高程、天线高)6测量测量:在工程菜单界面点击测量点测量:点击点测量撑好对中杆至水泡居中则按ent 键输入点名杆高再按ent键控制测量:点击控制测量点击设置输入相关参数点击确定其它如点测量点放样:点击点放样点击目标从坐标管理库中选择相应的点点击确定之后在手簿屏幕显示相应的距离再按照屏幕上的显示查找目标点线放样:点击点放样点击目标在直线放样库界面点击增加输入线名起点坐标与终点坐标和起点里程再点击确定在直线放样库中选择需要放样的直线再点击确认之后看屏幕上显示的方位及距离再按照屏幕上的显示查找目标线。

机械手操作说明书一、简介机械手是一种自动化设备,通常用于重复、高精度的工业操控。
它由多个关节和执行器组成,可以模拟人手的动作,并在工业生产线上完成多种任务。
本操作说明书将为您提供机械手的基本操作步骤和注意事项。
二、安全操作1. 在操作机械手之前,请确保您已经接受过相关培训,并理解机械手的工作原理和操作规程。
2. 在操作机械手时,请穿戴好防护设备,如手套、护目镜等,以确保自身的安全。
3. 请确保机械手所处的工作环境符合安全要求,如地面干燥、通风良好等。
4. 不要尝试修理机械手的内部零部件,如果出现故障,请及时联系维修人员。
三、机械手操作步骤1. 开启机械手的电源,并确保电源指示灯已亮。
2. 操作控制器,选择合适的程序或模式,以实现所需的操作。
3. 通过控制器上的按钮或摇杆,控制机械手的关节和执行器进行动作。
4. 监视机械手的运动过程,确保它能够准确地执行所需的任务。
5. 在操作完成后,关闭机械手的电源,并将控制器放置在适当的位置,以防止损坏或误操作。
6. 定期清洁机械手的表面,确保其正常运行,并使用合适的润滑剂,保持关节的灵活性。
7. 如遇到故障或异常情况,请及时报告给上级或维修人员,不要擅自进行修理。
四、操作注意事项1. 避免将手或其他物体靠近机械手的活动部件,以避免夹伤或划伤。
2. 不要超过机械手的工作负荷范围,过载可能会导致机械手的损坏或事故发生。
3. 在移动机械手时,要先确保周围没有人员或障碍物,以免发生意外碰撞。
4. 当机械手执行任务时,请远离其工作范围,以免受伤。
5. 勿将机械手用于不适合的环境或任务,以免造成损坏或安全风险。
五、维护和保养1. 定期检查机械手的零部件,包括关节、执行器、传感器等,如有损坏或磨损,请及时更换。
2. 确保机械手的电气系统正常工作,如有异常,请及时检修或更换电气元件。
3. 定期清洁机械手的内部和周围的工作区域,以去除积尘、油污等物质。
4. 根据生产计划和实际使用情况,对机械手进行定期保养,包括润滑、调整等工作。
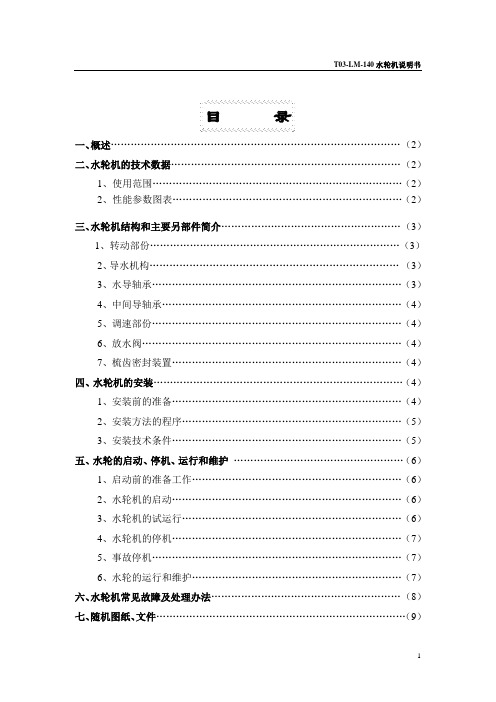
目录一、概述 (2)二、水轮机的技术数据 (2)1、使用范围 (2)2、性能参数图表 (2)三、水轮机结构和主要另部件简介 (3)1、转动部份 (3)2、导水机构 (3)3、水导轴承 (3)4、中间导轴承 (4)5、调速部份 (4)6、放水阀 (4)7、梳齿密封装置 (4)四、水轮机的安装 (4)1、安装前的准备 (4)2、安装方法的程序 (5)3、安装技术条件 (5)五、水轮的启动、停机、运行和维护 (6)1、启动前的准备工作 (6)2、水轮机的启动 (6)3、水轮机的试运行 (6)4、水轮机的停机 (7)5、事故停机 (7)6、水轮的运行和维护 (7)六、水轮机常见故障及处理办法 (8)七、随机图纸、文件 (9)一、概述水轮机是将水能转换为机械能的水力原动机。
其出力大小主要取决于工作时的水头和流量。
本机为ZDT03—LM—140型立轴轴流定浆式水轮机,具有结构合理、运行可靠、使用维护方便等到优点。
1、型号说明ZDT03—LM—140型水轮机ZD——轴流定浆式T03——新转轮型号L——主轴布置为立式M——明槽引水室140——转轮公称直径为140厘米2、本机与发电机采用法兰联接结构,用圆柱横销传递扭矩。
主轴旋转方向从发电机端看为顺时针方向。
3、本机配用YT—600、YT—1000型机械液压自动调速器及YWT—600、YWT—1000微机液压自动调速器。
配套范围见表一。
4、空蚀性能根据T03转轮的研究部门(天津电气传动设计研究所)介绍,ZDT03转轮空蚀性能好于ZD760转轮,为保守起见ZDT03转轮空蚀系数σm值选取方法为:用ZDT03设计点的值(n1ˊ,Q1ˊ),对应ZD760相同值(n1ˊ,Q1ˊ相同)所对应的空蚀系数σm值就作为T03转轮该设计点的空蚀系数σm值。
二、水轮机的技术数据1、使用范围适用水头Hp (m) 3.5 ~ 6.5流量Q (m3/ s) 4.8 ~ 8.87出力N (kw) 146 ~ 436转速n (r/min) 250 ~ 3752、性能参数图表1) 运转综合特性曲线(图一~ 图七)2)飞逸特性曲线(图八)3)轴向水推力曲线(图九)4)ZDT03—LM—140型水轮机性能参数配套表(表一)三、水轮机结构和主要部件简介本机为轴流定浆式水轮机。

1、找到电柜里的分线器(FX-FANUC /3D-LJ-A)将0V\+5V\B\A\1-12接的线对应到新面板的几个插头。
FX-FANUC /3D-LJ-A说明书
正面图示:
一、使用说明
该分线器为FANUC系统配合MK-3D-LJ-A面板使用的分线器,CB107插头接I/O插头,可以接CB107或CE57用户自定义;N-F-E 为IDC26需和面板相连;PLUG1接控制面板;OUT1(F+M)是单排端子,B08-B13为多余的I/O点,用户自定义,0V、5V、B、A 为手轮的接入端子需和系统相连;N-F-E-SYS为POWER ON、POWER OFF、EMG的接入端子需和相关控制继电器相连,1-12做如下分配:
1-4对应POWER ON的D-、D+、NO、C
5-8对应POWER OFF的D-、D+、NC、C
9-12对应EMG的NC2、C2、NC1、C1
其中NC端视用户具体要求可更改为NO端。
新面板的外接端子说明对应分线器(FX-FANUC /3D-LJ-A)端子号1、PWR ON:
K:常开触点3
K24:24V电源公共端4
L24:开机指示灯信号2
L0V:0V公共端1
2、PWR OFF:
K:常闭触点7
K24:24V电源公共端8
L24:关机指示灯信号 6
L0V:0V公共端5
3、EMG:
E1:急停1号触点1 12
E1:急停1号触点2 11
E2:急停2号触点1 10
E2:急停2号触点2 9
4、HANDLE:
V+:手轮电源正+5V
HA:手轮脉冲A A
HB:手轮脉冲B B
0V:手轮电源0V 0V。
LS-B 系列手册Rev.2水平多关节型机器人LS-B系列手册Rev.2Copyright 2021 SEIKO EPSON CORPORATION. All rights reserved. LS-B 系列 Rev.2 i前言感谢您购买本公司的机器人系统。
本手册记载了正确使用机器人所需的事项。
安装该机器人系统前,请仔细阅读本手册与其他相关手册。
阅读之后,请妥善保管,以便随时取阅。
本公司的产品均通过严格的测试和检查,以确保机器人系统的性能符合本公司的标准。
但是如果在超出本手册所描述的环境中使用本产品,则可能会影响产品的基本性能。
本手册阐述了本公司可以预见的危险和问题。
请务必遵守本手册中的安全注意事项,安全正确地使用机器人系统。
商标Microsoft、Windows及Windows标识为美国Microsoft Corporation在美国或其它国家的注册商标或商标。
其它品牌与产品名称均为各公司的注册商标或商标。
关于标记Microsoft® Windows® 8 Operating systemMicrosoft® Windows® 10 Operating system本使用说明书将上述操作系统分别标记为Windows 8, Windows 10。
另外,有时可能将Windows 8, Windows 10统一标记为Windows。
注意事项禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
如您发现本手册的内容有误或需要改进之处,请不吝斧正。
制造商Array联系方式有关咨询处的详细内容,请参阅下记手册序言中的“销售商”。
机器人系统安全手册请先阅读本手册ii LS-B 系列 Rev.2报废报废本产品时,请根据各国或各地区的法律法规进行报废处置。
关于电池处理产品上贴有“crossed out wheeled bin”(打叉的带轮垃圾桶)标签,表示该产品及其所含电池不得作为正常的生活垃圾处理。
https://
可在/global/cadexapproved上找到CADEX
1.
2.
3.
01
组装第一步骤
1.
2.
3.
4.
请参见组装第二步骤
5.
请参见组装第三步骤
6.
0203
0405
组装第二步骤
将轮胎第一侧胎唇完全置于★hook底部 (整轮轮圈的中心底部)。
组装第三步骤
第二侧安装也由气嘴对向处开始,依序往气嘴处进行 (如下图所示)。
将轮胎第二侧胎唇装入★hook底部,必要时调整第一侧胎唇使第二侧胎唇有更多的空间进入
6.
1.
11 1.。
公路车轮组: 负载总重量不可超过285 lbs / 129kg
2.。
碳纤维-铝合金复合轮组的碳纤维部分非轮圈的主体结构,于运送或收纳时特别注意 12
3.
4.
5.6.
1.
2.
1.
2.。
在异常、竞赛、与/或商业活动中或非依本产品设计目的而使用本产品。
因参与竞赛、跳跃、下坡(downhill)活动/比赛,或此类活动/比赛之训练,或因本产品暴露于或
08。