手轮接线方法1
- 格式:doc
- 大小:4.09 MB
- 文档页数:4

电动门的控制原理、调试步骤及常见故障处理我厂使用的电动门和执行结构有扬州、常州、ROTORK、SIPOS、AUMA、瑞基、EMG等系列;一、概述电动装置是电动阀门的驱动装置,用以控制阀门的开启和关闭;适用于闸阀、截止阀、节流阀、隔膜阀、其派生产品可适用于球阀、碟阀和风门等,它可以准确地按控制指令动作,是对阀门实现远控和自动控制的必不可少的驱动装置.二、电动门的控制原理一电动装置的结构阀门电动装置由六个部分组成:即电机,减速器,控制机构,手--自动切换手轮及电气部分.1、控制机构由转矩控制结构,行程控制机构及可调试开度指示器组成.用以控制阀门的开启和关闭及阀位指示.1转矩控制机构由曲拐、碰块、凸轮、分度盘、支板和微动开关组成.当输出轴受到一定的阻转矩后,蜗杆除旋转外还产生轴向位移,带动曲拐旋转,同时使碰块也产生一角位移,从而压迫凸轮,使支板上抬.当输出轴上的转矩增大到预定值时,则支板上抬直至微动开关动作,切断电源,电机停转,以实现电动装置输出转矩的控制.2行程控制机构由十进位齿轮组,顶杆,凸轮和微动开关组成,简称计数器.其工作原理是由减速箱内的主动小齿轮Z=8带动计数器工作.如果计数器已经按阀门开或关的位置已调好,当计数器随输出轴转到预先调整好的位置时,则凸轮将被转动90度,压迫微动开关动作,切断电源,电机停转,以实现对电动装置的控制.2、手自动切换机构为半自动切换,电动转变为手动需要扳动切换手柄,而由手动变为电动时系自动进行;由电动变为手动时,即用人工把切换手柄向手动方向推动,使输出轴上的中间离合器向上移动,压迫压簧;当手柄推到一定位置时,中间离合器脱离蜗轮与手动轴爪啮合,则可使手轮上的作用力通过中间离合器传到输出轴上,即成为手动状态;手动变为电动为自动切换,当电机旋转带动蜗轮转动时,直立杆立即倒下,在压簧作用下中间离合器迅速向蜗轮方向移动,与手轮轴脱开,与蜗轮啮合,则成为电动状态;二传动原理:电动机输出动力,通过蜗杆传至蜗轮及离合器 ,最终传至输出轴;由于蝶簧组件的预紧力使蜗杆处于蜗轮的中心位置;当作用于输出轴上的负载大于蝶簧预紧力时,蜗杆将会做轴向移动,并偏离位置;此时曲拐将摆动,传递位移至转矩控制机构,若此时超过设定的转矩将会使开关动作,切断电源,电动执行机构停止运行;见下图三电气原理如上图所示电气原理图:1、按下控制盘上开按钮SO1,则开过程开始控制回路经A1a----A1b----A11----A12----A13----N开接触器KMO线圈吸合;其常开触点KMO闭合,构成自保持,其主接点KMO闭合,接通电机回路,电机正转,阀门开启,当阀门达到全开位置时,开行程开关LSO动作,切断控制回路,KMO掉点复位,电机失电停转,同时行程开关LSO 动作,CRT上状态变红,阀门开到位;2、按下控制盘上关按钮SC1,则开过程开始控制回路经A1a----A1b----A41----A42----A43----N关接触器KMC线圈吸合;其常开触点KMC闭合,构成自保持,其主接点KMC闭合,接通电机回路,电机反转,阀门开启,当阀门达到全关位置时,开行程开关LSC动作,切断控制回路,KMC掉点复位,电机失电停转,同时行程开关LSC 动作,CRT上状态变绿,阀门关到位;三、调试步骤关方向的调整:1用手动将阀门关严.2脱开行程控制机构,即用螺丝刀将行程控制机构中顶杆推进并转90度,使主动小齿轮与计数器个位齿轮组脱开.3用螺丝刀旋转“关”向调整轴,按箭头方向旋转直到凸轮压住弹性压板使微动开关动作为止,则关向行程初步调好.4松开顶杆使主动齿轮与两边个位小齿轮正确啮合,为保证其正确啮合,在松开顶杆后,必须用螺丝刀稍许左右转动调整轴或用手摇手轮,此时可以电动打开几圈,而后关闭,看关方向行程是否符合要求,如不符合要求,则应从新调整.二·开方向的调整:在关方向调整好以后,用手将阀门开到所需位置.然后脱开行程控制机构,旋转开向调整轴,按箭头方向调整直到凸轮压住弹性板,使微动开关动作.行程控制结构调完后,可以重复操作几次.一般阀门开位置在全行程的百分之90左右.特殊情况的除外如:送、引风机挡板;它们的开位置必须在百分之100;“开”方向调整轴;按箭头方向旋转直到凸轮压住弹性板,使微动开关动作为止;再使行程机构与主动小齿轮啮合,则开向行程调完;行程机构调好后,可反复试操几次,一般开阀门控制在全行程90℅左右;即行程已动作,但门还可以手动盘几圈在调整时,很容易出现行程调大或调小的问题,此时,如果是行程大了即门已开或关到位,但行程开关还未动作,则按反箭头方向调小;相反,如果是行程小了即门还未到位行程开关已动作,则按箭头方向调大;9、完成上述设置后,对阀门进行开-关、关-开操作使用控制器上的开关按钮,同时检查开/关指示灯的指示是否符合要求;四、常见故障处理1、故障现象:电机旋转,但没有驱动阀门分析原因:1手--自动切换损坏,将手自动切换更换即可2电机的齿轮脱落或磨损,与涡杆上的转动齿轮未啮合;将齿轮按上或更换;3阀门转动爪之间间隙过大或损坏,阀门传动轴套丝口损坏;4涡轮与涡杆之间齿轮磨损严重或损坏,间隙过大;2、故障现象:就地可以操作,但是远控不可以操作;分析原因:1反馈线接反,将反馈线接对即可;2远控切换开关损坏,更换新的转换开关;3有一定的闭锁条件;如液位、流量、压力等;4继电器损坏,更换新的继电器;3、故障现象:阀门能正确开启和关闭,但是CRT没有反馈;分析原因: 1端子排接线松动,紧固一下接线即可;2卡件损坏,更换相应的卡件;3提供反馈的行程开关未动作或者行程开关损坏,重新调整行程或者更换行程开关;4、故障现象:电动装置电动机不能启动分析原因:1电源故障 ;检查空开是否已经合闸;2按钮失灵;检查按钮是否损坏;3电源电压过低;查出电源电压过低的原因;4力矩开关动作;检查力矩开关是否动作,重新进行调整;5、故障现象:电动门开关到位后,交流接触器COK或CQG不释放分析原因:1行程开关损坏,在阀门到位后不能断开控制回路,使接触器不能正确释放;2就地控制回路存在短路或绝缘不良的情况,使行程开关不起作用;交流接触器存在剩磁现象,迟延释放;。

24vplc电子手轮
24V-PLC电子手轮说明书
适用系统:三菱、发那科、西门子、广数、新代等
DC24V-PLC专用电子手轮,输出脉冲100个脉冲/每回转,相位输出为:A B;/A /B
适合系统:适合各品牌PLC系统
一、特点说明:
1、脉冲发生器核心采用德国技术生产的优质编码器;金属码盘,刻度准确、精度高、质感佳、手感好;直流24V电源系统。
2、提供100PPR脉波输出。
3、附电源指示灯(LED,DC12V~24V)。
4、后盖附强力磁铁装置(选项,标准版不带磁铁);标准版本包含5米弹簧电缆线,线材保证30万次拉伸寿命;简易安装,兼容性高。
1
二、竞争特点:
1、接受原厂委托设计制造 ODM
2、接受原厂委托代工制造 OEM
3、PLC电子手轮可以选择电压输出
4、脉冲幅度可以选择DC24V输出(光耦OC输出类型);配合PLC系统应用极为方便
5、轴选择/倍率选择开关根据客户要求可选择PTP点对点输出和BCD二进制编码输出,格雷码输出
三、手轮接线图
2
中科六合(厦门)电子科技有限公司3。
实验一螺栓联接实验、实验目的1.测试轴向工作载荷的紧螺栓联接的受力和变形的关系曲线(变形协调图);C12.求螺栓刚度C1、被联接件刚度C2、相对刚度C1C2 ;3•试验预紧力和相对刚度对应力幅的影响,以考察对螺栓疲劳的影响。
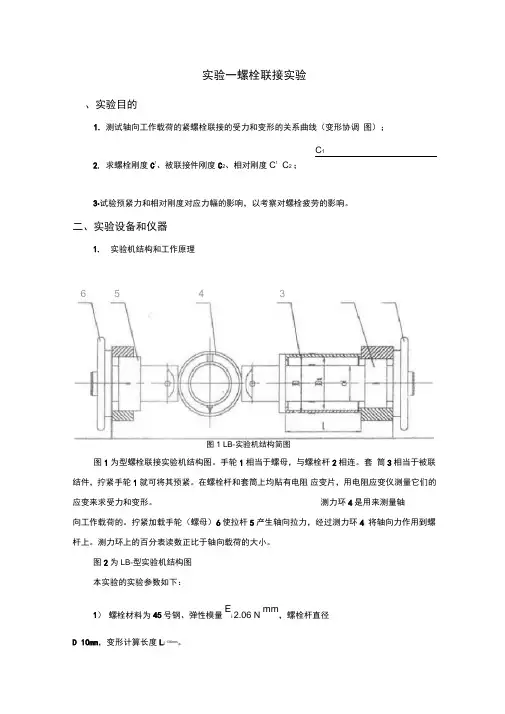
二、实验设备和仪器1.实验机结构和工作原理6 5 4 3图1 LB-实验机结构简图图1为型螺栓联接实验机结构图。
手轮1相当于螺母,与螺栓杆2相连。
套筒3相当于被联结件,拧紧手轮1就可将其预紧。
在螺栓杆和套筒上均贴有电阻应变片,用电阻应变仪测量它们的应变来求受力和变形。
测力环4是用来测量轴向工作载荷的。
拧紧加载手轮(螺母)6使拉杆5产生轴向拉力,经过测力环4 将轴向力作用到螺杆上。
测力环上的百分表读数正比于轴向载荷的大小。
图2为LB-型实验机结构图本实验的实验参数如下:1)螺栓材料为45号钢、弹性模量Ei 2.06 Nmm,螺栓杆直径D 10mm,变形计算长度L i 130mm。
5 , 22)套筒材料为45号钢,弹性模量E1 2.06 10 N mm,外直径 D 31mm 和32mm各一件,内直径D1 27-5mm,变形计算长度L2 130mm。
3)测力环刚度K N/百分表1格。
4)电阻应变片灵敏度系数_________。
2.仪器1)YJ 16型数字电阻应变仪2)YJ 18型数字电阻应变仪3)PR10 18型预调平衡箱1.背紧手轮2.螺栓3.套筒4.测力环5.拉杆6.加载手轮7.电阻应变片8.百分表9.预紧手轮图2型实验机结构简图三、实验原理1.力与变形协调关系在螺栓联接中,螺栓受拉力,产生拉伸变形;被联结件受压力,产生压缩变形。
根据螺栓和被联接件预紧力相等,可把二者的力和变形图线画在一个坐标系10中,如图3所示。
当螺栓受轴向工作载荷 F 作用时,其拉力由预紧力Q p增加到 总拉力Q 。
被联接件的压紧力Q P减少到剩余预紧力Q P。
这时,螺栓伸长变形 的增量 1,等于被联接件压缩变形的恢复2,即12,也就是说变形的关系是协调的。

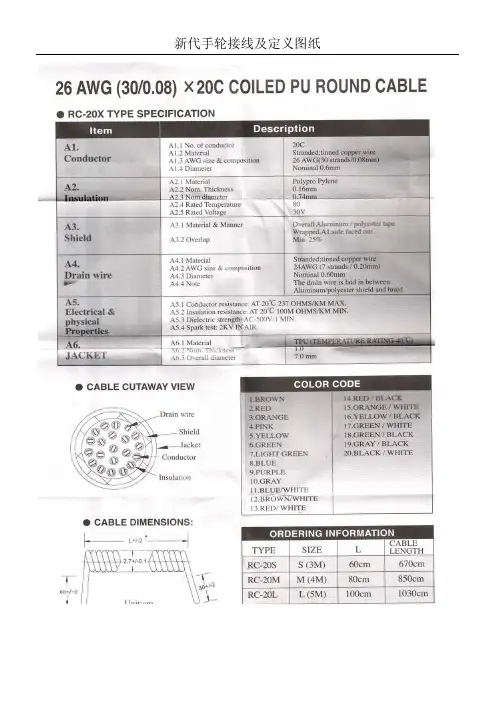
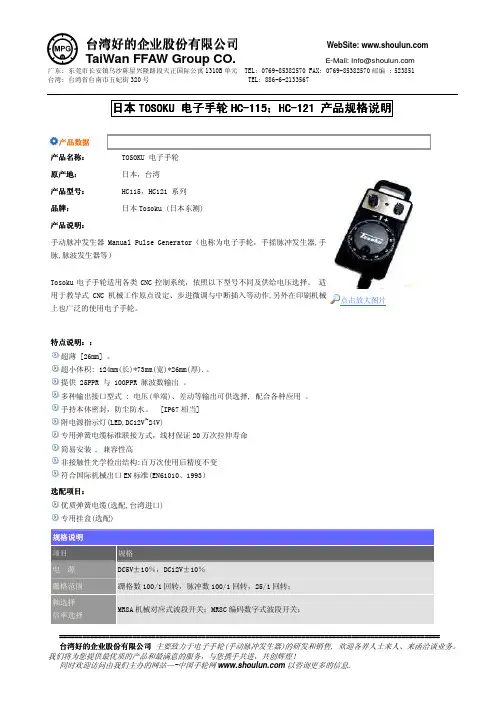
电子手轮维修电子手轮维修 (1)电子手轮概述 (1)电子手轮特点 (1)电子手轮规格 (1)生产电子手轮主要品牌及特点 (2)电子手轮在数控机床中的用途: (4)电子手轮主要作用原理 (5)电子手轮的用途 (6)电子手轮电路图 (7)航空插头图 (8)电子手轮概述电子手轮(既手摇脉冲发生器)即手摇脉冲发生器(Manual Pulse Generator,也称为手轮,手脉,手动脉波发生器等),用于教导式CNC 机械工作原点设定、步进微调与中断插入等动作,另外在印刷机械上也广泛的使用电子手轮.电子手轮特点1、超薄型,重量轻,手感极佳。
2、驱动器输出,抗干扰能力强,可长距离传输。
适用范围:用于数控机床、印刷机械等的零位补正和信号分割。
电子手轮规格电气特性 ELECTRICAL spec.输出波形Output Wave方波Square Wave供应电源Power Supply DC5-30V DC5V响应频率MAX.Response 0KHZ-100KHZ消耗电流Current consumption ≤60mA机械特性Mechanical spec.主体材质The main material铝合金Aluminum外壳材质Shell material铝合金Aluminum轴径the axis diameter 42mm.其他尺寸可定制轴负载Shaft loading轴向Axial:20N 径向Radial:30N起动转矩Starting torque ≤70克.厘米(+25℃)最高转速MAX.SPEED 4000rpm震动Vibration ≤100m/s(5~2000HZ)冲击Shock ≤1000m/s(11ms)重量weight ≤0.3kg环境特性Environmental spec工作温度 operating Temp -10℃-70℃(不结冰)工作湿度 operating Humidity 30~85%RH(无结露)储存温度 storage Temp -30℃-80℃防护等级protection grade IP50生产电子手轮主要品牌及特点三门湾HPG-003-A4:1.采用德国技术生产的优质编码器,金属码盘,刻度准确、精度高、质感佳、手感好2.直流 5V 或 12V 或24V电源系统可选3.提供 25PPR 或 100PPR 脉波数输出4.多种输出接口型式 : 电压(单端)、差动、开集电极输出(Open Collector)、以及光耦输出等多种输出可供选择, 配合各种应用 .5.支持多轴使用(最多 11 轴)6.附电源指示灯(LED,DC12V~24V)7.台湾弹簧线20万次拉伸寿命8.简易安装 , 兼容性高9.配有手轮挂钩,美观大气10.性价比高。
说明:
代表可由FANUC提供完整线缆或仅提供
注:1.根据线标K*可由后面章节查看该端口的管脚连接图
说明:
说明:
代表可由FANUC 提供完整线缆或仅提注:1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配
说明:
代表可由FANUC 提供完整线缆或仅提注:1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配
说明:
代表可由FANUC提供完整线缆或仅提供注: 1.根据线标K*可由后面章节查看该端口的管脚连接图
插头由MTB自行制作线缆
说明:
代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆
注: 1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配置),
说明:
代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆
注: 1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配置),DC24V
i
i i
position
coder
24V
24V
接
于
为制动插脚于,
为制动插脚
i
电源故障检测
i
电源故障检测
i
i i。
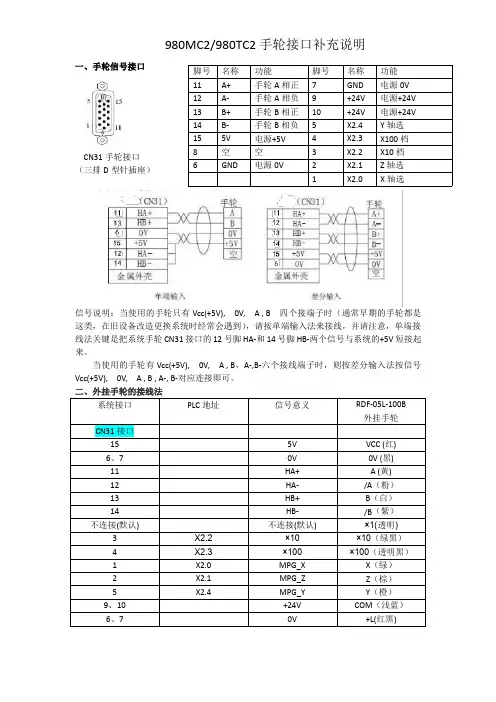
980MC2/980TC2手轮接口补充说明
一、手轮信号接口
CN31手轮接口(三排D
型针插座)
信号说明:当使用的手轮只有Vcc(+5V),0V,A ,B 四个接端子时(通常早期的手轮都是这类,在旧设备改造更换系统时经常会遇到),请按单端输入法来接线,并请注意,单端接线法关键是把系统手轮CN31接口的12号脚HA-和14号脚HB-两个信号与系统的+5V 短接起来。
当使用的手轮有Vcc(+5V),0V,A ,B ,A-,B-六个接线端子时,则按差分输入法按信号Vcc(+5V),0V,A ,B ,A-,B-对应连接即可。
二、外挂手轮的接线法
系统接口PLC 地址
信号意义
RDF-05L-100B 外挂手轮
CN31接口
155V VCC (红)6、70V 0V (黑)11HA+A (黄)12HA-/A (粉)13HB+B (白)14HB-/B (紫)不连接(默认)
不连接(默认)
×1(透明)3X2.2×10×10(绿黑)4X2.3×100×100(透明黑)
1X2.0MPG_X X (绿)2X2.1MPG_Z Z (棕)5X2.4
MPG_Y Y (橙)9、10+24V COM (浅蓝)6、7
0V
+L(红黑)
脚号名称功能脚号名称功能11A+手轮A 相正7GND 电源0V 12A-手轮A 相负9+24V 电源+24V 13B+手轮B 相正10+24V 电源+24V 14B-手轮B 相负5X2.4Y 轴选15
5V 电源+5V 4X2.3X100档8空空3X2.2X10档6
GND
电源0V
2X2.1Z 轴选1
X2.0
X 轴选。
常闭电热执行器接法全文共四篇示例,供读者参考第一篇示例:常闭电热执行器是一种常闭式的电动执行器,也叫电热执行器。
它主要用于控制管道系统中的阀门,通过控制执行器的开关来实现阀门的开启和关闭。
常闭电热执行器接法有多种,下面我们来详细介绍一下。
常闭电热执行器通常由执行器本体和控制板组成。
执行器本体上有一个驱动电机,用来控制阀门的开合;而控制板上则有控制电路,用来接收来自控制系统的信号,并控制执行器的动作。
常闭电热执行器的接法一般分为两种:串联接法和并联接法。
首先是串联接法。
在串联接法中,执行器和阀门串联连接。
也就是说,执行器的输出轴与阀门的阀杆连在一起,通过执行器的开合来控制阀门的开闭。
这种接法通常用于要求比较高的阀门,比如大口径的阀门或者需要大力矩的阀门。
除了串联和并联接法,常闭电热执行器还可以通过不同的接口来连接到控制系统。
常见的接口有信号输入接口、电源接口和手动控制接口。
信号输入接口用来接收来自控制系统的信号,通常是4-20mA模拟信号或者0-10V模拟信号。
这些信号会根据控制系统的要求控制执行器的开合动作。
电源接口用来提供执行器所需的电源,通常是220V交流电源或者24V直流电源。
电源接口还可以用来连接备用电源,以防止主电源故障时仍能正常工作。
手动控制接口用来手动操作执行器,通常是一个手动开关或者手轮。
在自动控制系统无法正常工作时,可以通过手动操作来控制执行器的动作。
常闭电热执行器的接法多样,可以根据实际情况选择合适的接法。
通过正确连接执行器和控制系统,可以实现对阀门的精确控制,提高系统的稳定性和可靠性。
希望以上介绍对您有所帮助,谢谢!第二篇示例:常闭电热执行器接法是指电热执行器在工作时保持关闭状态的接线方法。
常闭电热执行器在众多领域得到广泛应用,如暖通空调系统、供暖系统、给排水系统等。
接线正确与否不仅关系到设备的工作稳定性和性能,还关系到使用安全和能效。
以下将详细介绍常闭电热执行器的接法。
1. 常闭电热执行器的介绍常闭电热执行器是一种用来调节阀门开启和关闭的设备,它通过加热元件使活塞运动,驱动阀门的开启和关闭。
说明:
代表可由FANUC提供完整线缆或仅提供
注:1.根据线标K*可由后面章节查看该端口的管脚连接图
说明:
说明:
代表可由FANUC 提供完整线缆或仅提注:1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配
说明:
代表可由FANUC 提供完整线缆或仅提注:1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配
说明:
代表可由FANUC提供完整线缆或仅提供注: 1.根据线标K*可由后面章节查看该端口的管脚连接图
插头由MTB自行制作线缆
说明:
代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆
注: 1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配置),
说明:
代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆
注: 1.根据线标K*可由后面章节查看该端口的管脚连接图
2.电池是在使用绝对式编码器时使用(非标准配置),DC24V
i
i i
position
coder
24V
24V
接
于
为制动插脚于,
为制动插脚
i
电源故障检测
i
电源故障检测
i
i i。
说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注: 1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配综合接线图(i说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注: 1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注: 1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注:1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配DC24Vii ipositioncoder24V24V接近开关制动插脚,制动插脚i 电源i 电源traynis。
手持手脉电子手轮与佳门JNC-40M控制卡接线方法
手里有一个DC-5V-100PPR A B信号的手轮如下图
要用这个手轮接在佳门JNC-40M控制卡上我们需知道手轮的每一根线对应的功能如下图。
他是按照颜色区分的。
我们可以查看说明书或者从网上搜索对应型号的电子版说明书来获取如下接线要求。
(有些手轮淘宝卖家也会把如下接线要求贴在宝贝详情里面供买家参考)
另外需要知道控制卡控制卡与手轮连接接线情况
JNC-40M控制卡边上有一个16P接口端子是用来接手轮的如下图
JNC-40M控制卡与手轮连接接线要求如下
接线时我们用到下面第一张图片这个一头压好的FC-16P压线头。
我们会发现第一张图片压线头中间有一个凸起的部分,而第二张图片控制卡的手轮接口有个缺口的部分,这种巧妙的设计使其只有一种连接方法,有效的解决了误连接导致的器材损坏和意外的发生。
我们又会发现压线头的一面有一个三角形的图案。
如下图。
在压线的时候我们遵循一个原则:红色的线必须放在有三角形的图案那边。
保证接线时不会出错。
把压线头插到JNC-40M控制卡手轮接口上(如图11)我们又会发现红色的线(第一根线)
正好与手轮接口端子的1号脚(手轮脉冲A)连接
(根据控制卡与手轮连接的接线要求得知红色的线(第一根线)对应的是手轮脉冲A )从左至右如图11
那么第二根线对应2号脚(手轮脉冲B),
第三根线对应3号脚(+5V输出)
第四根线对应4号脚(GND)
以此类推。
(要根据控制卡与手轮连接的接线要求对应其功能否则会出错)
这样我们结合手轮和控制卡手轮接口的接线要求就可以清楚的明白
红线(第一根线)(手轮脉冲A)接黄色的线
第二根线对应2号脚(手轮脉冲B)接白色的线
第三根线对应3号脚(+5V输出) 接红色的线
第四根线对应4号脚(GND) 接黑色的线
以此类推。
这样我们就能快速的进行接线
我们把线剥开并剪掉一些不需要的线,套上热缩管,然后一一连接
连接好之后用电烙铁在连接部位上点锡使其牢固。
再用热吹风机吹热缩管,使其受热收缩牢牢贴在线的表面,起到一个绝缘的作用
然后连接到控制卡上,进行测试,测试无误后再用热吹风机吹大的热缩管,使其保持一个比较整洁的外形这样手脉电子手轮与佳门JNC-40M控制卡接线就大功告成了。