电子手轮电路图
- 格式:doc
- 大小:109.50 KB
- 文档页数:1
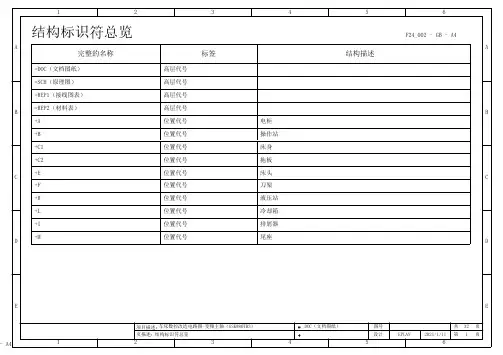
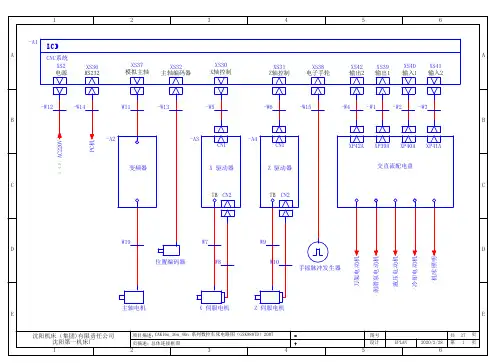
A B C D EABCDE标签完整的名称F24_002 - GB - A4结构描述结构标识符总览=DOC(文档图纸)高层代号=SCH(原理图)高层代号=REP1(接线图表)高层代号=REP2(材料表)高层代号+A电柜位置代号+B操作站位置代号+C1床身位置代号+C2拖板位置代号+E床头位置代号+F刀架位置代号+R液压站位置代号+L冷却箱位置代号+I排屑器位置代号+M尾座位置代号ABCDEABCDE开关电源电子手轮变频器主轴电机主轴编码器X 伺服电机X 驱动器Z 驱动器Z 伺服电机电动刀架AC/DC配电盘润滑油泵冷却泵机床照明GSK980TB3数控系统-XS2电源接口-XS30X 驱动接口-XS31Z 驱动接口-XS32主轴编码器-XS38手轮-XS34主轴接口-XS39输出1-XS40输入1-XS41输入2-XS42输出2A B C D EABCDE 端子图表F13_003 - GB-A4端子排功能文本线号线号目标代号目标代号短连接短连接内部目标外部目标放置=SCH(原理图)+A-X1L1L11电源L1-QF0:1+/1.1:C L2L22=L2-QF0:3+/1.1:C L3L33=L3-QF0:5+/1.1:C PE PE PE=A B C D EABCDE功能文本线号线号目标代号目标代号短连接短连接内部目标外部目标放置=SCH(原理图)+A-X2-FN1:121电柜风机2-QF7:2+/3.4:A2-X2:3+/3.5:C-FN1:202电柜风机-GD2:N+/3.3:C+B-A1-GD1:N+/4.3:C0-X2:4+/3.6:C-FN1:PE PE PE电柜风机-FN2:123=2-X2:1+/3.4:C-FN2:204=0-X2:2+/3.4:C-FN2:PE PE PE=+E-M2:U1U25主电机冷却风机U2-QM1:2+/9.2:B+E-M2:V1V26=V2-QM1:4+/9.2:BW2-QM1:6+/9.2:B+E-M2:W1W27=+E-M2:PE PE PE=U5-KM1:2+/14.1:C+F-M5:U1U58刀架电机U5-FV2+/14.1:CV5-KM1:4+/14.1:C+F-M5:V1V59刀架电机V5-FV2+/14.1:C+F-M5:W1W510刀架电机W5-KM1:6+/14.2:CW5-FV2+/14.1:CA B C D EABCDE功能文本线号线号目标代号目标代号短连接短连接内部目标外部目标放置=SCH(原理图)+A-X2+F-M5:PE PE PE刀架电机+L-M6:U1U611冷却泵电机U6-KM3:2+/16.2:B+L-M6:V1V612=V6-KM3:4+/16.2:B+L-M6:W1W613=W6-KM3:6+/16.2:B+L-M6:PE PE PE=+R-M7:114导轨润滑电机+R-M7:215=22-U3-X2:5C+/17.3:C+R-M7:PE PE=A B C D EABCDE功能文本线号线号目标代号目标代号短连接短连接内部目标外部目标放置=SCH(原理图)+A-X31系统上电L+-GD2:+24V+/3.3:C+B-SB1:21L+2=3+B-SB1:22+/4.1:A+B-SB2:1333=4+B-SB2:14+/4.1:C-KA0:14(+)44X 限位+24V-XS40A-X:11+/6.4:C+B-SB3:21+24V+24V-X3:4+/8.2:A+24V-X3:4+/7.2:A+B-SB5:13+24V4循环启动-X3:10+/8.3:A+24V+C2-SQ1-1:1175X 限位7+B-SB3:22+/7.2:B+B-SB4:137+C2-SQ1-3:32+/7.2:D6X 限位+C1-SQ2-3:3210*ESP+B-SB4:14+/7.5:C-XS40A-X:10*ESP7急停*ESP+C1-SQ2-1:11+/7.3:C8循环启动+B-SB5:14ST ST-XS40A-X:8+/8.2:D*SP-XS40A-X:7+/8.3:D9进给保持+B-SB6:22*SP+24V-X3:4+/8.2:A+C2-SQ1-2:21+24V10X 零点+24V-X3:12+/8.4:A*DECX-XS40A-X:1+/8.3:D+C2-SQ1-2:22*DECX11X 零点12Z 零点+C1-SQ2-2:21+24V+24V-X3:10+/8.3:A+C1-SQ2-2:22*DECZ13=*DECZ-XS40A-X:9+/8.4:DA B C D EABCDE功能文本线号线号目标代号目标代号短连接短连接内部目标外部目标放置=SCH(原理图)+A-X3+F-U5:+24V+24V14刀架电源+24V-XS40A-X:23+/15.2:D+F-U5:0V0V15=0V-XS40A-X:24+/15.2:D+F-U5:1T01161号刀T01-XS40A-X:6+/15.3:D+F-U5:2T02172号刀T02-XS40A-X:5+/15.4:D+F-U5:3T03183号刀T03-XS40A-X:4+/15.5:D+F-U5:4T04194号刀T04-XS40A-X:3+/15.5:D+C2-EL24V20机床照明24V-QF5:2+/2.5:D+C2-EL:x2021=0-TC2+/2.3:C-GD2:N+/3.3:CA B C D EABCDE符号地址设备标识符 PLC地址项目名称功能文本放置端子车床数控改造电路图-变频主轴(GSK980TB3)=SCH(原理图)+B-A1+/10.1:A主轴故障7+/10.2:A模拟电压10+/10.3:A0V11+/6.1:A13+/6.2:A18+/6.2:A19+/6.2:A20+/6.2:A21+/6.3:A22+/6.3:A23+/6.3:A24+/6.3:A25+/6.4:A11+/6.5:A14+/6.5:A15+/6.5:A16+/6.5:A17+/6.6:A18+/15.2:D电源23+/15.2:D0V24+/6.6:A25+/10.2:D电源11A B C D EABCDE符号地址设备标识符 PLC地址项目名称功能文本放置端子车床数控改造电路图-变频主轴(GSK980TB3)=SCH(原理图)+B-A1X1.0+/7.5:E急停10X1.1+/8.4:E Z 零点减速9X1.2+/8.2:E循环起动8X1.3+/8.3:E进给保持7X1.5+/8.3:E X 零点减速1X2.0+/15.3:D 1 号刀6X2.1+/15.4:D 2 号刀5X2.2+/15.5:D 3 号刀4X2.3+/15.5:D 4 号刀3X3.7+/10.1:D速度到达7Y5.0+/10.5:A主轴正转7Y5.1+/10.6:A主轴反转3Y5.3+/16.4:A冷却15Y5.4+/17.4:A润滑6Y6.6+/14.5:A刀架正转12Y6.7+/14.6:A刀架反转13A B C D EABCDE 元件汇总表元件代号型号描述制造商数量广州数控2伺服驱动器,20A模块,适配1~1.3kw伺服电机DA98A-20-A2广州数控2伺服驱动器,30A模块,适配1.5~1.88kw伺服电机DA98A-30-A3阿尔法2变频器,三相380V,7.5kw/11kw,17A/25A;ALPHA6000E-37R5GB/3011PB-A4广州数控1数控车床系统,横式,7寸液晶屏GSK980TB3-A11LED机床工作灯,长臂式,24V AC,12W。
CAK16n系列数控车床CAK32n系列数控车床CAK36n系列数控车床CAK40n系列数控车床机床控制参数表GSK 980TD沈阳机床(集团)有限责任公司沈阳第一机床厂CAK16_32_36_40n 系列 机床控制参数表沈阳第一机床厂 1 / 8参数号 参数值 标记 调整值001 00011001# 002 00100000 003 00011000 004 01001000 005 00010011 006 00000000 007 00000000 # 008 00000100 # 009 00100011 # 010 ******** 011 10010000 012 10101111 013 00000000 014 00000111015 1 016 1 017 1 018 1 019 5 020 0 021 0 # 022 4000 # 023 8000 # 024 50 # 025 50 # 026 200 # 027 8000 # 028 500 # 029 70 # 030 10 031 0 032 400 033 200 034 0 035 0 036 0 # 037 3000 # 038 10 # 039 10 # 040 10 # 041 200 042 10参数号 参数值 标记 调整值043 99 044 11520 045 +99999999 # 046 +99999999 # 047 -99999999 # 048 -99999999# 049 0 050 0 051 3500 052 500 053 1500 054 2500 055 3 056 500 057 1 058 0 059 0 060 0 061 0 062 0 063 0 064 0 065 0 066 1000 067 1000 068 0 069 0 070 1024 071 32 076 1000 077 0 078 15000 079 0 080 500 081 500 082 0 083 500 084 4 # 085 1000 086 0 087 50 088 0CAK16_32_36_40n 系列 机床控制参数表沈阳第一机床厂 2 / 8参数号 参数值 标记 调整值 089 50090 0 094 0 095 0 096 0 097 0 098 0 099 10 100 0 101 0 102 30000 103 20000 104 0 105 0 106 0 107 0 108 3000 109 40 110 1 111 1 112 0 119 3 164 11100110 168 00000000 172 00000100 # 173 ******** # 177 ********# 125 10 126 10 127 10 128 30 129 30 130 10参数号 参数值标记调整值诊断号DT00201500 DT0021 6000 DT0025 6000 DT0027 6000 DC00254800伺服参数 参数号 X 轴 Z 轴 12 5 5 13 4 3 *15 0 0注:1. 设曾参数时先将系统设定参数开关为开。
初中物理电学电路图大全(打印)一、基本电路图1. 串联电路:将电路元件依次连接,电流依次通过每个元件。
例如,将两个电阻依次连接,电流依次通过这两个电阻。
2. 并联电路:将电路元件并列连接,电流分别通过每个元件。
例如,将两个电阻并列连接,电流分别通过这两个电阻。
3. 串联与并联混合电路:将电路元件既有串联又有并联的连接方式。
例如,将两个电阻串联,再将这个串联电路与另一个电阻并联。
4. 开关电路:在电路中加入开关,可以控制电路的通断。
例如,在串联电路中加入一个开关,当开关闭合时,电路导通;当开关断开时,电路断开。
5. 短路电路:电路中某处电阻很小,导致电流过大。
例如,将两个电阻并联,其中一个电阻的阻值非常小,导致电流大部分通过这个电阻。
6. 断路电路:电路中某处断开,导致电流无法通过。
例如,将两个电阻串联,其中一个电阻被剪断,导致电流无法通过。
7. 电池电路:将电池与电路连接,提供电能。
例如,将一个电池与一个电阻串联,电池提供电能,电阻消耗电能。
8. 电压表电路:将电压表连接到电路中,测量电路两端的电压。
例如,将一个电压表并联到两个电阻之间,测量这两个电阻之间的电压。
9. 电流表电路:将电流表连接到电路中,测量电路中的电流。
例如,将一个电流表串联到电路中,测量电路中的电流。
10. 电功率电路:将电路元件与功率表连接,测量电路的功率。
例如,将一个电阻与功率表串联,测量电阻消耗的功率。
二、特殊电路图1. 限流电路:在电路中加入限流电阻,限制电路中的电流大小。
例如,在电池电路中加入一个限流电阻,限制电路中的电流不超过某个值。
2. 分压电路:将电路元件与电压表连接,测量电路中某点的电压。
例如,将一个电阻与电压表串联,测量电阻两端的电压。
3. 恒流源电路:使用恒流源提供稳定的电流。
例如,将一个恒流源与一个电阻串联,恒流源提供稳定的电流,电阻消耗电能。
4. 恒压源电路:使用恒压源提供稳定的电压。
例如,将一个恒压源与一个电阻并联,恒压源提供稳定的电压,电阻消耗电能。
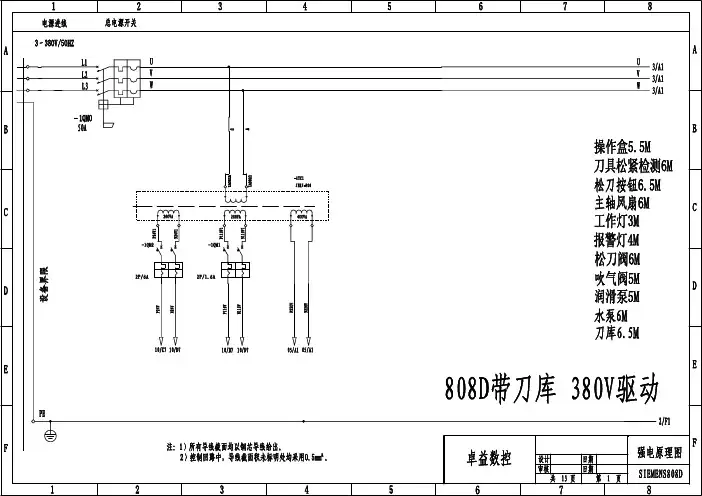
A B C D E FABCDEF -1QM03~380V/50HZ设备界限50A注:1)所有导线截面均以铜芯导线给出。
电源进线总电源开关L3L2L1PE强电原理图3/A13/A13/A12/F1 WVUWVU-1TC1JBK5-800P22VW380V1U380V1N22VP11V1P11VN11V10/B7-1QM12P/1.6AU WN11V105/A1P24V1P24VN24V-1QM22P/6AN24V1400VA200VA200VA05/A110/D710/C710/D7操作盒5.5M刀具松紧检测6M松刀按钮6.5M主轴风扇6M工作灯3M报警灯4M松刀阀6M吹气阀5M润滑泵5M水泵6M刀库6.5M808D带刀库380V驱动A B C D E FABCDEF直流24V电源DC24V电源1.5mm1/F82QM23/F1PE2QM3DC24VDC0VDC24V1DC0V1DC24V2DC0V26A6A04/C304/C3接系统电源部分接外围设备部分05/A505/E5机床上电控制部分5KA1DC24VDC0V+24V-+T3AC220VDC24V210ANLPE黄绿P220VN220V01/C801/D8N22VP22V2QM1(1.6A)1243P22V1N22V1P220VN220V05/A105/A1A B C D E FABCDEF三相380V电机1/A81/A81/A84/A64/A64/A63QM2W33V33U33KM33TB40223TB4022KM2V34U343M2PE0.2KWW34VU W1-1.60.6A5312465312465312460.75刀盘马达(选配)主轴电机风扇1A3M3PEW35U35V353QM3WU V531246WVU1/B20.6-120.75220.750.751/E3WVU3QM11/B2V32U323M1PE0.2KWW32VU W1.6-2.40.6A53124620.75刀臂马达(选配)KM13TB4022531V31U31W31冷却水泵KM43TB4022U V WW37V37U373M40.45KW1A PE5313QM45312461/B31-1.6W36V36U360.7522排屑机(选配)U V WW38V38U383M50.2KW0.6A PE3QM55312461/B31-1.60.752A B C D E FABCDEF驱动模块及电机主轴驱动单元模拟量给定+10VFV0VFC运转使能I1SCX54808DPE外壳5614报警L1L2L3U V WU V W3/A83/A83/A8主轴电机7.5KWMC02/C6M02/D602/D6DC24V1I211/D211/D3Q2.1Q2.SVDCV1定位I311/D4Q2.2DC24V2MA10/A3I3.编码器T5编码器反馈T4PPUX60攻丝I4Q.710脚Z11脚Z-N12脚B-N13脚B14脚A-N15脚A准停到位MOC02/C6DC24V2MOA09/C6I1.609/C3FEDCBAFEDCBAPE0.4A5M1P 51N 51P220VN220V01/C801/D8N 220VP 220V单相220V热交换器5QM1(0.5A)12mm1243N 220VP 220V5QM2(1A)Q 1.25M23421间歇润滑泵P 51N 5110/B 35S15S25KA15KA15453DC24V131434128125/B72/D5baDC0V上电按钮下电按钮上电按钮灯5KA155812断电按钮灯5355ba N 220VP 220VN 220V10/D310/B4上/下电控制B C D E FBCDEFX轴驱动器X9L1L2L3UVWM3GSINAMICS V70PE7/A27/A27/A2编码器电缆动力电缆UVWX10X11Drive Bus总线电缆Drive Bus总线电缆PEX7DC24V2DC0V22/D62/D6B+B-X6M+24VST01ST0+ST02UVWDCPR2FEDCBFEDCB6/A76/A76/A7U VWY/Z轴驱动器X 9L1L2L3U V W M3GSINAMICS V70PE 编码器电缆动力电缆X10X11Drive Bus总线电缆Drive Bus总线电缆PEX7DC24V2DC0V22/D62/D6B+B-X6M+24VST01ST0+ST02X 9L1L2L3U V W M3GSINAMICS V70PE 编码器电缆动力电缆X10X11Drive Bus总线电缆Drive Bus总线电缆PEX7DC24V2DC0V22/D62/D6B+B-抱闸电缆(黑)抱闸电缆(白)X6M+24VST01ST0+ST02DCP R2DCP R2B C D E FBCDEF PPUX1X126X60X10X21X100X101X102X200X201X301X302X30X10USB电缆X5424V DCDrive Bus总线接口G120主轴外置编码器手轮SP轴编码器手轮快速I/O数字量输入数字量输出扩展I/O备注:必须连接X200的24V信号,否则PPU和驱动无法正常通讯。

ZWGP系列无线电子手轮说明书使用本产品之前,请阅读本手册并妥善保存手册作日后参考适用于德国西门子(SIEMENS )、日本三菱(MITSUBISHI )、法那科(FANUC )、西班牙发格(FAGOR )、法国NUM 、台湾宝元、台湾新代等数控。
1、采用无线通讯频段,无线433MHZ 距离40米;2、采用自动跳频功能,同时使用32套无线手轮,互不影响;5、轴选和倍率信号支持二进制编码和格雷码等信号类型;4、支持6档轴选功能,3档倍率选择功能;6、支持5V 差分脉冲信号,非差分脉冲信号,24V 脉冲信号等多种脉冲信号类型;3、支持急停按钮功能,和3个扩展按钮开关量输出;7、低功耗设计,2节AA 电池可以使用1个月以上;注释:1、状态指示灯:电源灯(左一):OFF 档打开后,电源灯常亮; 信号灯(左二):操作手轮时,信号灯常亮;低电压报警灯(右一):电池电量过低时,报警灯闪烁或者常亮;2、使能按钮:按住使能按钮后,激活轴选和倍率信号,并且脉冲编码器输出有效;3、自定义按钮:无任何功能的按钮,控制接收器上对应的一个开关量输出;型号:ZTWGP-3:ZTWGP 接收器注释:1、状态指示灯:电源灯(左一):OFF 档打开后,电源灯常亮; 信号灯(左二):操作手轮时,信号灯常亮;低电压报警灯(右一):电池电量过低时,报警灯闪烁或者常亮;2、使能按键:按住使能按钮后,激活轴选和倍率信号,并且脉冲编码器输出有效;型号:ZTWGP:ZTWGP 接收器接收器功能介绍COM1:轴选倍率信号输出的公共端;可以接0-24V 公共信号COM2:3个自定义按钮输出的公共端;型号:ZTWGP 接收器:接收器端子定义产品功能描述注释:1、状态指示灯:电源灯(左一):OFF 档打开后,电源灯常亮; 信号灯(左二):操作手轮时,信号灯常亮;低电压报警灯(右一):电池电量过低时,报警灯闪烁或者常亮;2、正负快速移动按钮:按住“+”按钮,手轮连续发送正向脉冲; 按住“-”按钮,手轮连续发送负向脉冲;型号:ZWGP:ZWGP 接收器线号+5V 0V ABA-B-XYZ451X 10X 100X COM 红黑黄白透明白蓝黑棕黑红透明+黑蓝橙色绿黑白黑绿黑黄功能电源正极脉冲A相脉冲B相轴选X轴轴选Y轴轴选Z轴轴选4轴轴选5轴倍率1X档倍率10X档倍率100X档轴选倍率的公共信号颜色电源负极脉冲A-相脉冲B-相接收器功能介绍与端子定义无线电子手轮WGP型号规则059:产品外观:Z表示Z系列外观;9:TWGP:带急停按钮;WGP:则不带急停按钮:脉冲输出参数:01:表示5V,25毫安;A,B脉冲信号输出:100PPR03:表示5V,差分信号;A,A-;B,B-;脉冲信号输出:100PPR02:表示12V,5毫安;A,B脉冲信号输出:25PPR(适合三菱系统)04:开路输出;A,B脉冲信号.低电平,NPN输出.(适合PLC等)05:源极输出;A,B脉冲信号,高电平输出,PNP输出.(适合PLC):手轮支持的轴数量;5表示支持5轴;6表示支持6轴;:手轮轴选输出方式:A表示点对点输出;B表示编码输出:手轮倍率输出方式:A表示点对点输出;B表示编码输出:手轮支持的扩展按钮数量:3表示支持3个扩展按钮输出;:表示倍率特殊输出模式:X表示倍率信号为脉冲式输出(西门子系统专用):表示无线信号接收器的工作电压:05表示5V供电;12表示12V供电;24表示24V供电倍率编码输出1X和COM连通倍率10X: 10X和COM连通倍率100X: 倍率1X,10X都和COM连通倍率1X:型号:Z TWGP01-6 B A- 3 X脉冲输出选型指南型号参数描述适合系统电源DC5V,输出脉冲100PPR,相位输出为A,B两路脉冲序列A和B相差90;开路集电极电路,内装200欧5V上拉电阻日本法那科FANUC系统台湾中达电通TNC台湾忆图(HUST)系列国内如航天数控,华中数控,广州诺信凯恩帝KND等系列电源DC12V,输出脉冲25PPR,相位输出为A,B,两路脉冲序列A和B相差90开路集电极电路,内装2K欧12V的上拉电阻日本三菱MELDAS电子手轮(MELDAS M64;M65;E60等系统为电源DC12V,输出为DC5V)Gp01Gp02Gp03电源DC5V,输出脉冲100PPR,相位输出为A,A-,B,B-,采用5V差分脉冲信号输出适合台湾宝元,台湾新代SYNTEC系统,德国PA系统,典型如:海徳盟Higerman,海那克Higerman,广州数控GSK,开通数控 等数控系统;国外系统:西门子,NUM,西班牙法格FAGOR(NEW,8055I)等输出脉冲100PPR,相位输出为A,B两路脉冲序列A和B相差90;低电平,NPN输出日本法那科FANUC系统德国西门子等系列;适合PLC;Gp04输出脉冲100PPR,相位输出为A,B两路脉冲序列A和B相差90;高电平,PNP输出日本法那科FANUC系统德国西门子等系列;适合PLC;Gp05成都芯合成科技有限公司Chengdu XinHeCheng Technology Co .,Ltd网站:http ://www .wixhc .com客服电话:028-******** 如有印刷或翻译错误,望用户谅解。
C650车床继电触摸器操控电路图阐明C650中型卧式车床,可加工最大工件直径为1020mm,最大工件长度为3000mm。
如下图所示为C650通常车床继电触摸器操控电路,下表为电路电气元件的称谓及用处。
C650中型卧式车床的主轴电动机功率为30kW,主轴电动机驱动主轴箱的动力轴翻滚,经过变速齿轮股动夹有工件的主轴翻滚。
由于工件较方,为使其能活络接连翻滚,有必要设有泊车制动功用,该机床选用反接制动,为削减制动电流,定子回路串入了限流电阻R。
装在滑板箱上的刀架与滑板箱,由主轴箱中的传动轴来驱动,使其沿着主轴线方向移动,结束刀架的进给。
为减轻工人劳作强度和节约辅佐作业时刻,专门设置一台2.2kW的拖动溜板箱的活络移动电动机。
在切削进程中还需要油液冷却,由一台液压泵供应。
图中三台电动机,M1为主轴电动机,其央求是能够正回转,能制动,泊车快,为了加工调整便当,应能点动操作;M2为液压泵电动机,能长时刻作业,在加工时供应冷却液;M3为活络移动电动机,应能随时手动操控起动和接连。
C650通常车床电气元件表:主电路剖析主电路有三台电动机。
主电动机由三个触摸器操控,其间KM1为正转触摸器,KM2为回转触摸器,KM3为短接反接制动限流电阻触摸器。
M1具有FU1作短路维护、FR1作过载维护、电流表监督电流、速度继电器KS用于反接制动;冷却泵M2由KM4操控;活络移动电动机M3由KM5操控。
M2、M3都选用直接起动,单向作业。
操控电路剖析一、主电动机点动操控:上面的车床电路图中,M1的点动由点动按钮SB2操控。
按下SB2,触摸器KM1得电吸合,其主触点闭合,电动机定子绕组串电阻R与电源接通,电动机在低速下起动。
松开SB2,KM1断电[M1正转时,速度继电器正转常开触点KS1(17-23)已闭合]。
所以KM1常闭触点闭合,使KM2得电吸合,电动机反接制动而接连。
在点动进程中,由于KA、KM3都不得电,因而KM1、KM2就不能自锁。
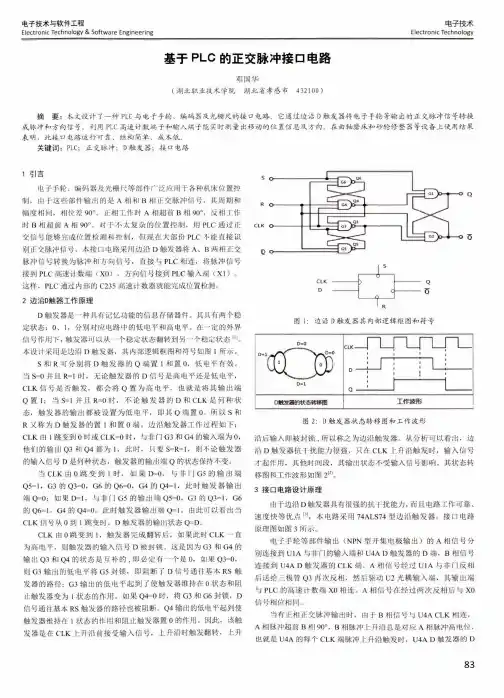
电珈术Electronic Technology电子技术与软件工程Electronic Technology & Software Engineering基于PLC 的正交脉冲接口电路邓国华(湖北职业技术学院 湖北省孝感市 432100 )摘 要:本文设计了一种PLC 与电子手轮、编码器及光栅尺的接口电路。
它通过边沿D 触发器将电子手轮等输出的正交脉冲信号转换成脉冲和方向信号。
利用PLC 高速计数端子和输入端子能实时测量出移动的位置信息及方向。
在曲轴磨床和砂轮修整器等设备上使用结果 表明,此接口电路运行可靠、结构简单、成本低。
关键词:PLC;正交脉冲;D 触发器;接口电路1引言电子手轮、编码器及光栅尺等部件广泛应用于各种机床位置控 制,由于这些部件输出的是A 相和B 相正交脉冲信号,其周期和幅度相同,相位差90。
正相工作时A 相超前B 相90。
,反相工作 时B 相超前A 相90。
对于不太复杂的位置控制,用PLC 通过正交信号能够完成位置检测和控制,但现在大部份PLC 不能直接识别正交脉冲信号。
本接口电路采用边沿D 触发器将A 、B 两相正交 脉冲信号转换为脉冲和方向信号,直接与PLC 相连,将脉冲信号接到PLC 高速计数端(X0),方向信号接到PLC 输入端(XI )。
这样,PLC 通过内部的C235高速计数器就能完成位置检测。
2边沿D 触器工作原理D 触发器是一种具有记忆功能的信息存储器件。
其具有两个稳 定状态:0、1,分别对应电路中的低电平和高电平。
在一定的外界信号作用下,触发器可以从一个稳定状态翻转到另一个稳定状态l ,]o本设计采用是边沿D 触发器,其内部逻辑框图和符号如图1所示。
S 和R 可分别将D 触发器的Q 端置1和置0,低电平有效。
当S=0并且R=1时,无论触发器的D 信号是高电平还是低电平,CLK 信号是否触发,都会将Q 置为高电平,也就是将其输出端 Q 置1;当S=1并且R=0时,不论触发器的D 和CLK 是何种状 态,触发器的输出都被设置为低电平,即其Q 端置0。

e-Cut运动控制卡使用手册Ver: 1.1e-cut 控制卡特点:支持Mach3所有版本,包括目前最新版Mach3R3.042.040。
支持所有Windows 版本,包括目前最新版Windows7。
USB 无需安装驱动,所有Windows版本即插即用。
全面支持USB 热插拔,随时监测USB 连线状态,Mach3工作中,USB 电缆拔出再插上,也可正常连线。
支持4轴联动,包括点动4轴联动。
支持自动对刀,电子手轮,软件限位,软件消回差功能。
48M 速度,无需PC 介入,信号由运动控制卡独立完成处理,确保您拥有真正地实时性和可靠性。
拥有800KHz 输出,接伺服/步进。
拥有状态指示灯,可提示USB 连线,Mach3连线,运行中,各类状态一目了然。
拥有16个输入指示灯,清楚显示信号输入状态。
拥有测速功能,主轴实际转速在Mach3界面中实时显示,采用外部12V-24V 直流电源,达到USB和外部端口真正的隔离,并且外部接口不用USB 供电,让系统工作更稳定。
采用10Mhz 高速光耦9个,通用光耦25个,总计光耦达到34个,隔离所有输入/输出,安全隔离距离达2.5mm。
精准的0-10V 模拟量输出,减少外部器件,主轴速度更稳定,5V 下拉的PWM 输出口,提供PWM 调速端口。
4层电路板精心布线,唯选优质器件,制作精良。
e -C u t使用手册目录运动控制卡配线示意图外形及安装尺寸1.Mach3的软件安装2.Mach3的软件配置3.运动控制卡的硬件安装B 运动控制卡的引脚功能描述B 运动控制卡的接线图6.外部倍率旋钮7.主轴调速模拟量输出8.主轴测速功能9.自动对刀10.电子手轮11.插补系数设置版本更新记录e -C u te -C u te -C u t1Mach3的软件安装1.1Mach3软件下载与安装e-cut 控制卡是基于Mach3加工软件的USB 接口的3/4轴外部运动控制卡。
最新版Mach3官方网站下载地址:/downloads.php进入官方网站后,点击Mach3下载:如下图中红圈所示e -C u t安装Mach3时,没有并口的电脑,请不要安装并口驱动,以免电脑出现蓝屏现象。