离散系统稳定性分析
- 格式:ppt
- 大小:256.51 KB
- 文档页数:14
自动控制原理离散系统知识点总结自动控制原理中的离散系统是指在时间域和数值范围上都是离散的系统。
在离散系统中,信号是以离散时间点的形式传递和处理的。
本文将对自动控制原理离散系统的知识点进行总结,包括离散系统的概念、离散信号与离散系统的数学表示、离散系统的稳定性分析与设计等。
一、离散系统的概念与特点离散系统是指系统输入、输出和状态在时间上都是以离散的方式存在的系统。
与连续系统相比,离散系统具有以下特点:1. 离散时间:离散系统的输入、输出和状态是在离散时间点上采样得到的,而不是连续的时间信号。
2. 离散数值:离散系统的输入、输出和状态都是以离散数值的形式存在的,而不是连续的模拟数值。
二、离散信号与离散系统的数学表示离散信号是指在离散时间点上采样得到的信号。
离散系统可以通过离散信号的输入与输出之间的关系进行描述。
常见的离散系统数学表示方法有差分方程和离散时间传递函数。
1. 差分方程表示:差分方程是通过离散时间点上的输入信号和输出信号之间的关系来描述离散系统的。
差分方程可以是线性的或非线性的,可以是时不变的或时变的。
2. 离散时间传递函数表示:离散时间传递函数描述了离散系统输入与输出之间的关系,类似于连续时间传递函数。
离散时间传递函数可以通过Z变换得到。
三、离散系统的稳定性分析与设计离散系统的稳定性是指系统的输出在有限时间内收敛到有限范围内,而不是无限增长或震荡。
离散系统的稳定性分析与设计是自动控制原理中的重要内容。
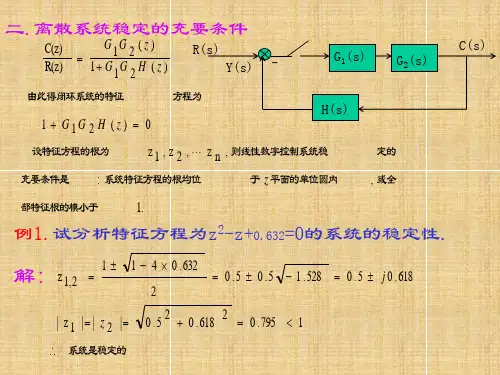
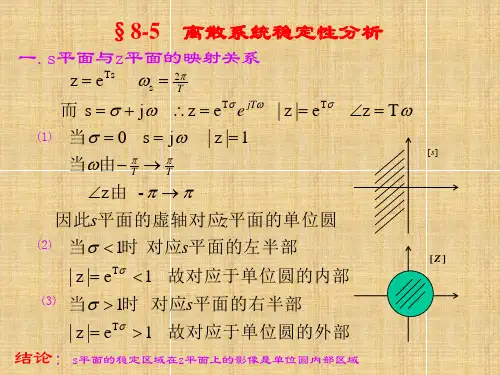
1. 稳定性分析:离散系统的稳定性可以通过判断系统的极点位置来进行分析。
若系统的所有极点都位于单位圆内,则系统是稳定的;若存在至少一个极点位于单位圆外,则系统是不稳定的。
2. 稳定性设计:若离散系统不稳定,可以通过调整系统的参数或设计控制器来实现稳定性。
常见的稳定性设计方法包括PID控制器调整、根轨迹设计等。
四、离散系统的性能指标与优化离散系统的性能指标与优化是指通过调整控制器参数或控制策略,使离散系统的性能得到优化。


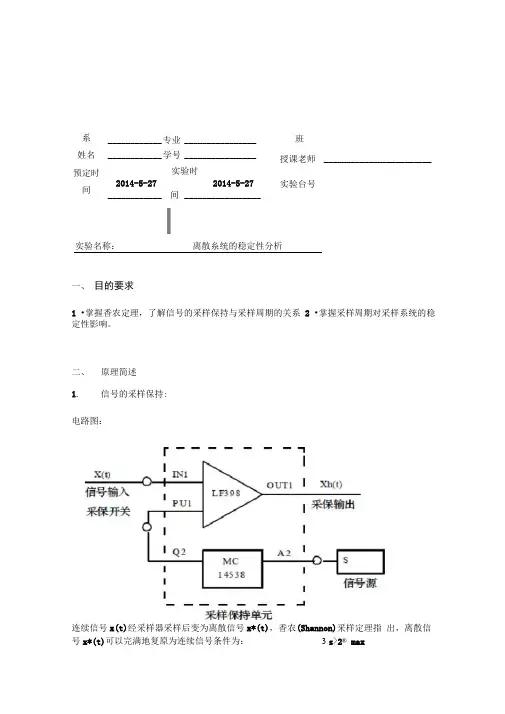
I实验名称:离散糸统的稳定性分析一、 目的要求1 •掌握香农定理,了解信号的采样保持与采样周期的关系2 •掌握采样周期对采样系统的稳定性影响。
二、 原理简述 1.信号的采样保持:电路图:连续信号x(t)经采样器采样后变为离散信号x*(t),香农(Shannon)采样定理指 出,离散信号x*(t)可以完满地复原为连续信号条件为:3 s >2® max系姓名 预定时 间____________ 专业 ________________ ____________ 学号 ________________ 实验时2014-5-27 2014-5-27____________ 间 _________________班授课老师 ________________________ 实验台号I n I® = -------式中3 S为米样角频率,且',(T为米样周期),3 max为连续信号x (t)的幅频谱| x (j CD 的上限频率T s 若连续信号x (t)是角频率为D S = 22.5的正弦波,它经采样后变为x*(t),则25(1-尹) ,1 _ 12 占[(2厂一1+訂巧二+ (1—訂「一 27>力)]0-1)匕-严)闭环脉冲传递函数为:C ⑵12.5[(2厂-l + d + (l -严—22)]丽'一 X 匚(25丁二 13.5 — 11.牝引)二十(12.5 — 11.5邑血—25T 严) 闭环采样系统的特征方程式为:z 2 +(25T-13.5 1 L5e _2r )z+ Q2.5-11 .Se'3r -25Te^T ) = 0特征方程式的根与采样周期T 有关,若特征根的模均小于1,则系统稳定,若有 一个特征根的模大于1,则系统不稳定,因此系统的稳定性与采样周期 T 的大小 有关。
仪器设备PC 机一台,TD-ACC+ (或TD-ACS )教学实验系统一套。
51. 如何分析离散控制系统的稳定性?嘿,咱们今天来聊聊怎么分析离散控制系统的稳定性这个事儿。
咱们先得搞清楚啥是离散控制系统。
简单说,就像咱们平时玩的跳格子游戏,一格一格的,不是连续的那种,这离散控制系统啊,也是这样,它的信号不是一直连着的,而是隔一段才有一个值。
那怎么去分析它稳不稳定呢?这可得有点小窍门。
咱们先来说说 z 变换,这可是个重要的工具。
就好比你有一堆杂乱的积木,通过 z 变换,能把它们整理得规规矩矩,更容易看出规律。
比如说,一个系统的传递函数,经过 z 变换,就能得到一个新的表达式,从这里咱们就能开始分析稳定性啦。
还有那个特征方程,这就像是系统的“密码锁”。
如果能解开这个方程,找到它的根,就能知道系统稳不稳定。
要是这些根都在单位圆内,那系统就是稳定的;要是有根跑到单位圆外面去了,那可就麻烦喽,系统就不稳定啦。
给你讲个我之前遇到的事儿吧。
有一次,我带着几个学生一起研究一个离散控制系统的稳定性。
那系统的方程复杂得让人头疼,大家一开始都有点懵。
其中有个学生特别较真儿,不停地尝试各种方法,一会儿画个图,一会儿又算一堆式子。
我就在旁边看着,偶尔给他们一点小提示。
最后啊,经过大家的努力,终于找到了关键所在,成功分析出了系统的稳定性。
那一瞬间,大家的脸上都洋溢着成就感,那种感觉可太棒了!再说说 Jury 判据,这也是个分析稳定性的好帮手。
它就像是一个精准的测量尺,能帮咱们准确判断系统的根是不是都在单位圆内。
总之啊,分析离散控制系统的稳定性,需要咱们掌握好这些工具和方法,多动手多思考。
就像解一道复杂的谜题,只要有耐心,有方法,总能找到答案的。
希望今天讲的这些能让你对分析离散控制系统的稳定性有更清楚的认识,加油哦!。
离散时间系统的可控性及其稳定性分析研究一、引言离散时间系统(discrete-time system)是指在时间上取样的系统,指的是在时域上离散且在幅度上是连续的信号,是一类重要的时域系统。
在日常生活中,我们常常会遇到离散时间系统,例如数字电子、数字通信、数字信号处理等领域。
离散时间系统的可控性及其稳定性是该领域热门的研究方向之一,本文将从两方面进行探讨。
二、离散时间系统的可控性1.可控性的定义可控性是指系统在一定时间内,能否通过其输入信号来达到所需状态,并且可以在该状态下保持一定的时间。
在离散时间系统中,可控性的定义与连续时间系统中的可控性类似,但并不能简单地借鉴连续时间系统的定义。
2.可控性的判定(1)Kalman条件Kalman条件是判定离散时间系统可控性的重要方法。
在离散时间系统中,若一个初态能够通过一个有限时间内的控制输入到达系统的任意状态,则称该系统是可控的。
用数学语言描述,即离散时间系统可控的条件是:矩阵 Cont(A,B) 的秩等于 n,其中 A 和B 是系统的状态矩阵和输入矩阵,n 是系统的状态维数。
(2)PBH条件PBH条件是判定离散时间系统可控性的另一种方法。
与Kalman条件相比,PBH条件更加简便,适用于各种规范矩阵A和B.给定一个离散时间系统,我们可以将可控性矩阵写成:$$ \begin{bmatrix} A - \lambda_i I & B \end{bmatrix} $$式中,I 是单位矩阵,λi 是系统的特征值,B 是系统的输入矩阵。
若该矩阵的秩等于系统状态维数 n,则该系统可控。
三、离散时间系统的稳定性1.稳定性的定义稳定性是指系统输入和状态状态在有限范围内的变化,系统的输出也会随之保持在一个有限的范围。
2.稳定性的性质(1)稳定性的充分条件离散时间系统可控的充分条件是系统的特征值均在单位圆内。
(2)稳定性的判定常用的离散时间系统稳定性判定方法有 Jury准则和Nyquist准则。
离散时间系统的稳定性分析离散时间系统是一种在离散时间点上进行状态变化的系统,与连续时间系统相对应。
稳定性分析是对系统行为的一个重要特征进行评估和判断的过程。
对于离散时间系统的稳定性分析,我们可以通过不同方法进行研究和判断,如利用差分方程、状态空间法、Lyapunov稳定性理论等。
本文将从这些角度出发,深入探讨离散时间系统的稳定性分析方法。
一、差分方程法差分方程法是一种基于离散时间点上变量之间的差分关系进行稳定性分析的方法。
对于离散时间系统,我们可以通过建立差分方程来描述系统的动态行为。
一般而言,稳定的离散时间系统在各个时间点上的状态变量都保持在某个有界范围内。
因此,我们可以通过差分方程的解析解或数值解来判断系统的稳定性。
二、状态空间法状态空间法是一种通过描述系统在不同离散时间点上状态变化的方法。
在状态空间中,系统的状态由一组关于时间的差分方程表示。
通过对系统状态进行迭代,我们可以从初始状态推导出系统在未来时间点上的状态。
根据这些状态的变化,我们可以判断系统是否稳定。
三、Lyapunov稳定性理论Lyapunov稳定性理论是一种通过利用Lyapunov函数来判断离散时间系统稳定性的方法。
Lyapunov函数是一个用于衡量系统状态的能量函数,它在系统稳定时具有稳定性的性质。
通过构造和分析Lyapunov函数,我们可以判断离散时间系统是否稳定。
如果能够找到一个Lyapunov函数,使得对于系统的每一个状态,该函数都是非负的,并且沿着系统的状态变化轨迹递减,那么系统就是稳定的。
四、其他稳定性分析方法除了以上介绍的几种常见方法外,还存在其他一些稳定性分析方法,如频率域方法、随机系统稳定性分析等。
这些方法可以根据具体问题的需求进行选择和应用,从而更好地评估离散时间系统的稳定性。
综上所述,离散时间系统的稳定性分析是研究系统动态行为的一个重要问题。
通过差分方程法、状态空间法、Lyapunov稳定性理论以及其他稳定性分析方法,我们可以对离散时间系统的稳定性进行全面评估和判断。
离散控制系统的稳定性分析与设计离散控制系统(Discrete Control System)是指将时间划分为离散的、不连续的间隔,并且系统的状态在这些间隔中发生改变的一种控制系统。
离散控制系统广泛应用于各种领域,如工业控制、自动化、机器人技术等。
在设计离散控制系统时,稳定性是一个至关重要的考虑因素。
本文将介绍离散控制系统的稳定性分析与设计。
一、离散控制系统的基本概念离散控制系统由离散信号和离散时间组成。
离散信号是在某一离散时刻上的取值是确定的,而在两个离散时刻之间则可以是任意值。
离散时间是指系统的状态在一系列离散时刻上发生变化。
离散控制系统与连续控制系统相比,更适用于数字化和计算机控制领域。
二、离散控制系统的稳定性分析离散控制系统的稳定性指系统对于输入信号的扰动具有一定的容忍度,系统能够维持在某一稳定状态而不产生不稳定的振荡。
稳定性分析是为了保证离散控制系统的正常工作和控制效果。
常用的稳定性分析方法包括传输函数法、根轨迹法和Lyapunov稳定性方法等。
1. 传输函数法传输函数法是一种基于系统的输入和输出之间的关系来分析稳定性的方法。
通过建立系统的传输函数,可以用频域的分析方法来判断系统的稳定性。
传输函数是输入变量和输出变量之间的比例关系,通常用拉普拉斯变换表示。
2. 根轨迹法根轨迹法是一种几何法,通过追踪系统传输函数的所有极点随参数变化而在复平面上运动的路径,分析系统的稳定性。
当系统的所有极点位于左半平面时,系统是稳定的。
3. Lyapunov稳定性方法Lyapunov稳定性方法是一种基于Lyapunov函数的方法,通过构造Lyapunov函数来分析系统的稳定性。
Lyapunov函数是一个实值函数,满足一定的条件,可以确定系统的稳定性。
若系统的Lyapunov函数对于所有的非零初始条件都是非负的,则系统是稳定的。
三、离散控制系统的稳定性设计在离散控制系统的设计过程中,稳定性是至关重要的考虑因素。
离散控制系统中的稳定性与鲁棒性分析离散控制系统是指由离散时间运行的控制系统,它采样输入和输出信号来完成控制功能。
稳定性和鲁棒性是离散控制系统设计中非常关键的问题,本文将对离散控制系统中的稳定性与鲁棒性进行详细分析。
一、稳定性分析稳定性是指在系统的输入和输出之间存在一种平衡状态,系统能够对输入信号作出适当的响应而不发生不可控制或不可预测的震荡或发散。
稳定性分析主要有零极点分布、Nyquist稳定判据和位置根判据等方法。
1. 零极点分析离散系统的稳定性与其极点的位置有关。
通常采用单位脉冲响应函数H(z)的零极点分布来分析系统的稳定性。
对于一阶离散系统而言,它的极点位置应满足|z|<1的条件才能保证系统的稳定性。
对于高阶系统,可以通过复平面法或者根轨迹法来分析系统的稳定性。
2. Nyquist稳定判据Nyquist稳定判据是通过绘制Nyquist图来判断系统的稳定性。
根据Nyquist稳定判据,如果系统的传输函数H(z)的极点都位于单位圆内,那么系统是稳定的。
否则,系统将会出现振荡或发散的现象。
3. 位置根判据位置根判据是通过对系统的传输函数进行倒数操作,然后判断所得到的新系统的极点位置来评估系统的稳定性。
位置根判据的基本思想是,如果倒数系统的极点位于单位圆外,那么原系统是稳定的。
二、鲁棒性分析鲁棒性是指系统具有对参数变化、环境变化或非线性因素的强鲁棒性,即保持系统的性能特性不因外界因素变化而发生较大改变。
在离散控制系统中,鲁棒性分析主要有灵敏度函数法、小增益界定理和鲁棒优化等方法。
1. 灵敏度函数法灵敏度函数法是通过构造灵敏度函数来分析系统的鲁棒性。
灵敏度函数可以用来评估系统对参数变化的敏感性。
如果灵敏度函数的幅值比较小,说明系统对参数变化不敏感,具有较好的鲁棒性。
2. 小增益界定理小增益界定理是一种常用的鲁棒性分析方法。
它基于系统的复值矩阵进行分析,通过确定复值矩阵的边界来评估系统的鲁棒性。
实验一离散系统稳定性分析实验学时:2 实验类型:常规 实验要求:必作 一、 实验目的:(1) 掌握利用MATLAB^制系统零极点图的方法; (2) 掌握离散时间系统的零极点分析方法;(3) 掌握用MATAL 实现离散系统频率特性分析的方法; (4) 掌握逆Z 变换概念及MATLA 实现方法; (5) 掌握用MATLA 分析离散系统稳定性。
二、 实验原理:1、离散系统零极点图及零极点分析;线性时不变离散系统可用线性常系数差分方程描述,即NM' a :y(n -i)八 gx(n - j)(8-1)i=0j =0其中y(k)为系统的输出序列, x(k)为输入序列。
将式(8-1 )两边进行Z 变换的将式(8-2)因式分解后有:M丨丨(z-q j )j —1H (z) = C ~丨丨(z- P i )i d其中C 为常数,q j ( j =1,2^' ,M )为H (z)的M 个零点,p : (i = 1,2,…,N )为H ( z)的N 个极点。
系统函数H (z)的零极点分布完全决定了系统的特性, 系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统 函数零极点的分析,可以分析离散系统以下几个方面的特性:系统单位样值响应 h(n)的时域特性;H (z)Y(z)X (z)Mb j Z-Na j Z 」B(z)A(z)(8-2)(8-3)若某系统函数的零极点已知, 则1.1、零极点图的绘制设离散系统的系统函数为H(z)二竺A(z)则系统的零极点可用 MATLAB 的多项式求根函数roots()来实现,调用格式为: p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
2 31 如多项式为B(z)二z z •-,则求该多项式根的MATLAB 命令为为:48A=[1 3/4 1/8]; P=roots(A) 运行结果为: P =-0.5000 -0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母 多项式均按z 的降幕次序排列;另一种是分子、分母多项式均按 z 」的升幕次序排列。
离散控制系统的稳定性分析与设计方法离散控制系统的稳定性是控制工程中一个非常重要的概念,它涉及到系统的可靠性和性能。
本文将介绍离散控制系统的稳定性分析与设计方法,并讨论如何确保系统的稳定性。
一、稳定性分析离散控制系统的稳定性分析是通过对系统传递函数进行分析来确定系统是否稳定。
常用的稳定性判据有两种:时域方法和频域方法。
1. 时域方法时域方法是通过分析系统的时域响应来确定系统的稳定性。
具体方法有零极点判据和步响应法。
零极点判据是通过确定系统传递函数的零点和极点位置来判断系统的稳定性。
一般来说,当系统的所有极点都位于单位圆内部时,系统是稳定的。
步响应法通过观察系统的步响应图来判断系统的稳定性。
当系统的步响应图趋于稳定状态并在有限时间内收敛到稳定值时,系统是稳定的。
2. 频域方法频域方法是通过分析系统的频率特性来确定系统的稳定性。
常用的频域方法有Nyquist判据和Bode图法。
Nyquist判据是通过绘制系统的Nyquist图来判断系统的稳定性。
当系统的Nyquist图不通过虚轴右半平面时,系统是稳定的。
Bode图法是通过绘制系统的Bode图来判断系统的稳定性。
当系统的幅频特性曲线和相频特性曲线满足一定条件时,系统是稳定的。
二、稳定性设计稳定性设计是通过设计控制器的参数来确保系统的稳定性。
通常有两种常见的设计方法:根轨迹法和PID控制器。
1. 根轨迹法根轨迹法是通过绘制根轨迹图来设计控制器的参数。
根轨迹图可以直观地显示系统的稳定性和性能。
设计过程中,可以根据系统的要求来调整控制器的参数,使得系统的根轨迹满足要求。
2. PID控制器PID控制器是一种常用的控制器,它包括比例、积分和微分三个部分。
PID控制器的设计可以根据系统的特性和需求来确定各个参数的取值。
比例部分可以控制系统的静态误差,积分部分可以消除系统的稳态误差,微分部分可以提高系统的动态响应。
通过合理地调整PID控制器的参数,可以实现系统的快速响应和稳定性。
离散控制系统的稳定性分析离散控制系统是一种由离散时间事件驱动的系统,它在控制工程中起着重要的作用。
稳定性分析是离散控制系统设计中的关键步骤,它可以帮助我们确定系统是否能够保持在稳定状态,并达到预期的控制效果。
本文将讨论离散控制系统的稳定性分析方法和应用。
1. 离散控制系统概述离散控制系统是一种以时序离散的方式进行操作和控制的系统。
它由输入、输出和状态三个主要部分组成。
其中,输入是指系统接收来自外部的信号或信息,输出是指系统作为响应产生的结果,状态是指系统在运行过程中的内在特征。
2. 稳定性的概念和分类稳定性是指系统在输入变化或干扰下是否能够保持有限范围内的响应。
离散控制系统的稳定性可以分为绝对稳定性和相对稳定性两种情况。
绝对稳定性:系统在任何情况下都能保持有限范围内的响应,不会出现不受控制或不可预测的振荡或失控现象。
相对稳定性:系统在特定条件下能够保持有限范围内的响应,但可能受到输入变化或干扰的影响而出现逐渐增大的响应。
3. 稳定性分析方法离散控制系统的稳定性分析可以使用多种方法,以下是几种常用的方法:3.1 传递函数法传递函数是离散控制系统中描述输入输出关系的数学模型。
通过将系统表示为传递函数的形式,可以使用极点、零点、阶跃响应等特征来分析系统的稳定性。
例如,当系统的所有极点都位于单位圆内时,系统是稳定的。
3.2 极坐标法极坐标法是一种绘制离散控制系统零极点的图形方法。
通过绘制零极点在单位圆上的位置,可以直观地判断系统的稳定性。
如果所有极点都位于单位圆内,系统是稳定的。
3.3 稳定性判据法稳定性判据法是一种通过计算系统的稳定性判据来判断系统的稳定性的方法。
常用的稳定性判据包括李雅普诺夫稳定性判据、M行列稳定性判据等。
这些判据可以通过计算系统的特征值或特征向量来得到。
4. 稳定性分析的应用稳定性分析在离散控制系统设计和调试过程中有着广泛的应用。
它可以帮助工程师确定系统参数,设计合适的控制策略,并提供有效的故障诊断方法。