离散系统的稳定性
- 格式:pptx
- 大小:1.43 MB
- 文档页数:19


离散时间系统稳定的充要条件离散时间系统是指系统的输入和输出在时间上是离散的情况下进行的系统分析和设计。
而离散时间系统的稳定性是一个重要的性质,它决定了系统是否能够在一定范围内保持稳定的输出。
本文将介绍离散时间系统稳定性的充要条件。
一、离散时间系统的稳定性概念稳定性是指系统在有限时间内是否能够保持有限的幅值,而不会出现无限增长或发散的情况。
对于离散时间系统而言,其稳定性可以分为两类:绝对稳定和相对稳定。
绝对稳定是指系统的输出在有限时间内始终保持有限的幅值,不会发散或无限增长。
相对稳定是指系统的输出在有限时间内保持有限的幅值,但可能会在无穷时间后发散或无限增长。
二、离散时间系统的稳定性充要条件1. 线性时不变系统对于线性时不变系统而言,其稳定性充要条件是系统的传递函数的极点都位于单位圆内。
也就是说,系统的所有极点的模长都小于1。
2. 有限冲激响应系统对于有限冲激响应系统而言,其稳定性充要条件是系统的冲激响应是绝对可和的。
也就是说,系统的冲激响应的绝对和是有限的。
3. 时变系统对于时变系统而言,其稳定性充要条件是系统的输入和输出序列都是绝对可和的,并且系统的输入和输出序列的绝对和都是有界的。
4. 有限差分方程系统对于有限差分方程系统而言,其稳定性充要条件是系统的差分方程的根都位于单位圆内。
也就是说,系统的所有根的模长都小于1。
5. 正态系统对于正态系统而言,其稳定性充要条件是系统的所有特征值的实部都小于等于零。
6. 离散时间系统的Lyapunov稳定性对于离散时间系统而言,其稳定性充要条件是系统的状态方程存在一个正定矩阵,使得系统的状态的Lyapunov函数是递减的。
三、离散时间系统的稳定性判定方法除了以上充要条件外,还可以通过以下方法判断离散时间系统的稳定性:1. 构造系统的Lyapunov函数。
通过构造系统的Lyapunov函数来判断系统的稳定性。
如果系统的状态的Lyapunov函数是递减的,则系统是稳定的。

2-d 连续-离散系统的稳定性、可控性与可观测性判据
一、稳定性
连续离散系统稳定性是指系统状态值不断变化,但随着时间的推移,系统的解不会离开某一区域或范围,满足系统的平衡。
可以用Lyapunov准则来判断一个系统的稳定性,即找出一个函数V,系统的长期行为是满足V的进行,且由此可以确定系统的长期行为的变化趋势。
此外,系统稳定性还可以通过极点分析方法来判断,即系统极值处被定义为极点,并从中探索该系统在极点上是否稳定,以及该极点处系统解是否存在漂移和消失。
二、可控性
可控性是指系统的响应是通过控制器实现的,系统可以通过增加输入电压或输出力量来改变系统的输出响应,从而达到预期的解决方案。
可控性分析要求系统具有足够的响应能力,可以通过增加输入电压来改变系统的行为,但它的响应有限制,不能随意增加,而且可能受外界环境约束。
三、可观测性
可观测性是指系统的特性是可以通过测量来获取的,即可以观察系统的特性,推断出它是如何变化的,并且根据以往所观察到的特征来推测它在将来的变化趋势。
可观测性分析可以使用状态空间方程,用于获得关于系统的当前及未来设计状态的量化描述,从而确定系统的特征及其变化趋势。
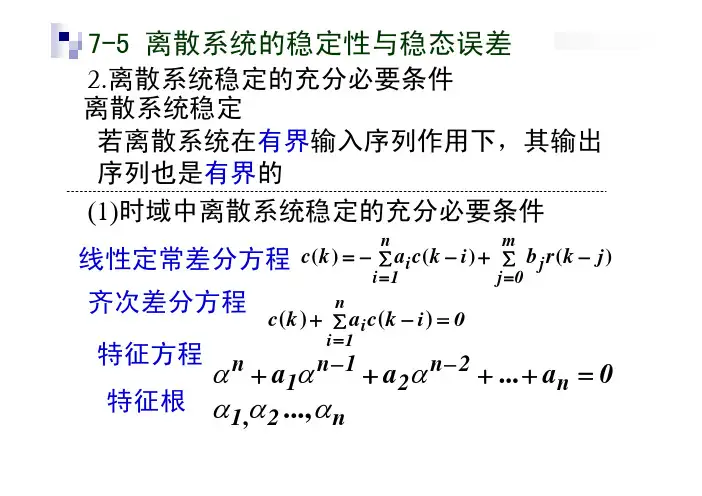
7-5 离散系统的稳定性与稳态误差2.离散系统稳定的充分必要条件 离散系统稳定 若离散系统在有界输入序列作用下,其输出 序列也是有界的 (1)时域中离散系统稳定的充分必要条件n m 线性定常差分方程 c( k ) = − ∑ ai c( k − i ) + ∑ b j r ( k − j ) i =1 j =0 n 齐次差分方程 c( k ) + ∑ ai c( k − i ) = 0 i =1特征方程α n + a1α n − 1 + a 2α n − 2 + ... + an = 0 特征根 α α ..., α 1, 2 n(1)时域中离散系统稳定的充分必要条件 线性定常差分方程 齐次差分方程 特征方程 特征根c( k ) =n c( k ) + ∑ a i c( k − i ) = 0 i =12.离散系统稳定的充分必要条件n m − ∑ ai c( k − i ) + ∑ b j r ( k − i =1 j =0j)α n + a1α n − 1 + a 2α n − 2 + ... + an = 0 α 1,α 2 ..., α n差分方程通解 n k k k k c( k ) = A1α 1 + A2α 2 + ... + Anα n = ∑ Aiα i 当|αi|<1时,必有k →∞lim c( k ) = 0i =1稳定的充要条件 特征根的模|αi|<17-5 离散系统的稳定性与稳态误差1.s域到z域的映射s = σ + jωz = e (σ + jω )T = eσT e jωTjz=esTz的幅值和相角?| z |= eσT∠ z = ωTjeσ 1Te −σ 2T−σ2σ11(2)Z域中离散系统稳定的充分必要条件 特征方程 D( z ) = 1 + GH ( z ) = 0 特征根 z1,z2,…,znjr(t) e(t) e*(t) E(z)c*(t) C(z)G(s) H(s)c(t)j1 稳定充要条件 特征根模小于1, 即|zi|<1例7-27 设离散系统如图,其中G(s)=10/s(s+1), c*(t) H(s)=1 ,T=1。
离散时间系统的稳定性分析离散时间系统是一种在离散时间点上进行状态变化的系统,与连续时间系统相对应。
稳定性分析是对系统行为的一个重要特征进行评估和判断的过程。
对于离散时间系统的稳定性分析,我们可以通过不同方法进行研究和判断,如利用差分方程、状态空间法、Lyapunov稳定性理论等。
本文将从这些角度出发,深入探讨离散时间系统的稳定性分析方法。
一、差分方程法差分方程法是一种基于离散时间点上变量之间的差分关系进行稳定性分析的方法。
对于离散时间系统,我们可以通过建立差分方程来描述系统的动态行为。
一般而言,稳定的离散时间系统在各个时间点上的状态变量都保持在某个有界范围内。
因此,我们可以通过差分方程的解析解或数值解来判断系统的稳定性。
二、状态空间法状态空间法是一种通过描述系统在不同离散时间点上状态变化的方法。
在状态空间中,系统的状态由一组关于时间的差分方程表示。
通过对系统状态进行迭代,我们可以从初始状态推导出系统在未来时间点上的状态。
根据这些状态的变化,我们可以判断系统是否稳定。
三、Lyapunov稳定性理论Lyapunov稳定性理论是一种通过利用Lyapunov函数来判断离散时间系统稳定性的方法。
Lyapunov函数是一个用于衡量系统状态的能量函数,它在系统稳定时具有稳定性的性质。
通过构造和分析Lyapunov函数,我们可以判断离散时间系统是否稳定。
如果能够找到一个Lyapunov函数,使得对于系统的每一个状态,该函数都是非负的,并且沿着系统的状态变化轨迹递减,那么系统就是稳定的。
四、其他稳定性分析方法除了以上介绍的几种常见方法外,还存在其他一些稳定性分析方法,如频率域方法、随机系统稳定性分析等。
这些方法可以根据具体问题的需求进行选择和应用,从而更好地评估离散时间系统的稳定性。
综上所述,离散时间系统的稳定性分析是研究系统动态行为的一个重要问题。
通过差分方程法、状态空间法、Lyapunov稳定性理论以及其他稳定性分析方法,我们可以对离散时间系统的稳定性进行全面评估和判断。
离散控制系统的稳定性与鲁棒性分析离散控制系统是现代控制工程中的重要研究领域之一。
稳定性与鲁棒性是离散控制系统设计与分析中需要关注的重要问题。
本文将对离散控制系统的稳定性与鲁棒性进行分析,并探讨其在实际应用中的重要性。
一、离散控制系统的稳定性分析稳定性是离散控制系统设计中最基本的性能指标之一。
一个离散控制系统是稳定的,当且仅当系统的输出在有限时间内得到有界的响应。
稳定性分析的目标是确定离散系统在不同条件下是否稳定,并为系统设计提供理论依据。
离散控制系统的稳定性分析常见的方法是通过判据法进行。
常用的稳定性判据包括:1) Routh-Hurwitz判据;2) Nyquist判据;3) 极点位置法等。
这些判据通过检查系统的特征方程的根来判断系统的稳定性。
当然,要进行稳定性分析还需要考虑系统的输入,例如周期性输入、随机输入等。
对于周期性输入,可以应用周期函数的性质来分析系统的稳定性。
对于随机输入,可以采用功率谱等方法来进行稳定性分析。
二、离散控制系统的鲁棒性分析离散控制系统的鲁棒性是指系统对外界扰动或参数变化的适应能力。
鲁棒性分析的目标是确定系统在面对各种不确定性时的性能表现。
鲁棒性分析常应用于系统的设计和控制中,特别是当系统参数受到变化或不确定性时。
它可以通过敏感性函数、稳定裕度等指标来评价系统的鲁棒性。
常见的鲁棒性分析方法包括:1) 级数展开法;2) 小摄动法;3) 鲁棒优化等。
这些方法能够在系统参数扰动的情况下,分析系统的性能表现,从而确定系统的鲁棒性。
离散控制系统的鲁棒性分析在实际应用中具有重要意义。
在现实工程中,系统参数常常受到环境、温度等因素的影响,因此需要考虑系统的鲁棒性。
鲁棒性分析能够帮助工程师评估和改善系统的性能,提高系统的可靠性和稳定性。
三、稳定性与鲁棒性的关系稳定性和鲁棒性是离散控制系统分析中密切相关的概念。
稳定性是判断系统在给定输入情况下是否能保持有限输出的能力,而鲁棒性则是判断系统在面对外界扰动和参数变化时的适应能力。
离散控制系统中的稳定性与鲁棒性分析离散控制系统是指由离散时间运行的控制系统,它采样输入和输出信号来完成控制功能。
稳定性和鲁棒性是离散控制系统设计中非常关键的问题,本文将对离散控制系统中的稳定性与鲁棒性进行详细分析。
一、稳定性分析稳定性是指在系统的输入和输出之间存在一种平衡状态,系统能够对输入信号作出适当的响应而不发生不可控制或不可预测的震荡或发散。
稳定性分析主要有零极点分布、Nyquist稳定判据和位置根判据等方法。
1. 零极点分析离散系统的稳定性与其极点的位置有关。
通常采用单位脉冲响应函数H(z)的零极点分布来分析系统的稳定性。
对于一阶离散系统而言,它的极点位置应满足|z|<1的条件才能保证系统的稳定性。
对于高阶系统,可以通过复平面法或者根轨迹法来分析系统的稳定性。
2. Nyquist稳定判据Nyquist稳定判据是通过绘制Nyquist图来判断系统的稳定性。
根据Nyquist稳定判据,如果系统的传输函数H(z)的极点都位于单位圆内,那么系统是稳定的。
否则,系统将会出现振荡或发散的现象。
3. 位置根判据位置根判据是通过对系统的传输函数进行倒数操作,然后判断所得到的新系统的极点位置来评估系统的稳定性。
位置根判据的基本思想是,如果倒数系统的极点位于单位圆外,那么原系统是稳定的。
二、鲁棒性分析鲁棒性是指系统具有对参数变化、环境变化或非线性因素的强鲁棒性,即保持系统的性能特性不因外界因素变化而发生较大改变。
在离散控制系统中,鲁棒性分析主要有灵敏度函数法、小增益界定理和鲁棒优化等方法。
1. 灵敏度函数法灵敏度函数法是通过构造灵敏度函数来分析系统的鲁棒性。
灵敏度函数可以用来评估系统对参数变化的敏感性。
如果灵敏度函数的幅值比较小,说明系统对参数变化不敏感,具有较好的鲁棒性。
2. 小增益界定理小增益界定理是一种常用的鲁棒性分析方法。
它基于系统的复值矩阵进行分析,通过确定复值矩阵的边界来评估系统的鲁棒性。
离散控制系统的稳定性分析与设计方法离散控制系统的稳定性是控制工程中一个非常重要的概念,它涉及到系统的可靠性和性能。
本文将介绍离散控制系统的稳定性分析与设计方法,并讨论如何确保系统的稳定性。
一、稳定性分析离散控制系统的稳定性分析是通过对系统传递函数进行分析来确定系统是否稳定。
常用的稳定性判据有两种:时域方法和频域方法。
1. 时域方法时域方法是通过分析系统的时域响应来确定系统的稳定性。
具体方法有零极点判据和步响应法。
零极点判据是通过确定系统传递函数的零点和极点位置来判断系统的稳定性。
一般来说,当系统的所有极点都位于单位圆内部时,系统是稳定的。
步响应法通过观察系统的步响应图来判断系统的稳定性。
当系统的步响应图趋于稳定状态并在有限时间内收敛到稳定值时,系统是稳定的。
2. 频域方法频域方法是通过分析系统的频率特性来确定系统的稳定性。
常用的频域方法有Nyquist判据和Bode图法。
Nyquist判据是通过绘制系统的Nyquist图来判断系统的稳定性。
当系统的Nyquist图不通过虚轴右半平面时,系统是稳定的。
Bode图法是通过绘制系统的Bode图来判断系统的稳定性。
当系统的幅频特性曲线和相频特性曲线满足一定条件时,系统是稳定的。
二、稳定性设计稳定性设计是通过设计控制器的参数来确保系统的稳定性。
通常有两种常见的设计方法:根轨迹法和PID控制器。
1. 根轨迹法根轨迹法是通过绘制根轨迹图来设计控制器的参数。
根轨迹图可以直观地显示系统的稳定性和性能。
设计过程中,可以根据系统的要求来调整控制器的参数,使得系统的根轨迹满足要求。
2. PID控制器PID控制器是一种常用的控制器,它包括比例、积分和微分三个部分。
PID控制器的设计可以根据系统的特性和需求来确定各个参数的取值。
比例部分可以控制系统的静态误差,积分部分可以消除系统的稳态误差,微分部分可以提高系统的动态响应。
通过合理地调整PID控制器的参数,可以实现系统的快速响应和稳定性。
离散控制系统的稳定性分析离散控制系统是一种由离散时间事件驱动的系统,它在控制工程中起着重要的作用。
稳定性分析是离散控制系统设计中的关键步骤,它可以帮助我们确定系统是否能够保持在稳定状态,并达到预期的控制效果。
本文将讨论离散控制系统的稳定性分析方法和应用。
1. 离散控制系统概述离散控制系统是一种以时序离散的方式进行操作和控制的系统。
它由输入、输出和状态三个主要部分组成。
其中,输入是指系统接收来自外部的信号或信息,输出是指系统作为响应产生的结果,状态是指系统在运行过程中的内在特征。
2. 稳定性的概念和分类稳定性是指系统在输入变化或干扰下是否能够保持有限范围内的响应。
离散控制系统的稳定性可以分为绝对稳定性和相对稳定性两种情况。
绝对稳定性:系统在任何情况下都能保持有限范围内的响应,不会出现不受控制或不可预测的振荡或失控现象。
相对稳定性:系统在特定条件下能够保持有限范围内的响应,但可能受到输入变化或干扰的影响而出现逐渐增大的响应。
3. 稳定性分析方法离散控制系统的稳定性分析可以使用多种方法,以下是几种常用的方法:3.1 传递函数法传递函数是离散控制系统中描述输入输出关系的数学模型。
通过将系统表示为传递函数的形式,可以使用极点、零点、阶跃响应等特征来分析系统的稳定性。
例如,当系统的所有极点都位于单位圆内时,系统是稳定的。
3.2 极坐标法极坐标法是一种绘制离散控制系统零极点的图形方法。
通过绘制零极点在单位圆上的位置,可以直观地判断系统的稳定性。
如果所有极点都位于单位圆内,系统是稳定的。
3.3 稳定性判据法稳定性判据法是一种通过计算系统的稳定性判据来判断系统的稳定性的方法。
常用的稳定性判据包括李雅普诺夫稳定性判据、M行列稳定性判据等。
这些判据可以通过计算系统的特征值或特征向量来得到。
4. 稳定性分析的应用稳定性分析在离散控制系统设计和调试过程中有着广泛的应用。
它可以帮助工程师确定系统参数,设计合适的控制策略,并提供有效的故障诊断方法。
离散力学系统的稳定性判定与优化离散力学系统是一类重要的力学系统,它由一系列离散的质点或刚体组成,通过相互作用力而产生运动。
在实际应用中,我们常常需要对离散力学系统进行稳定性判定和优化,以确保系统的可靠性和效率。
一、稳定性判定在离散力学系统中,稳定性判定是指系统在给定条件下是否能保持平衡或者稳定运动的能力。
稳定性判定的方法有很多种,其中一种常用的方法是通过线性化系统方程来进行判断。
线性化是一种常用的数学方法,它将非线性系统方程在某一点附近进行近似,得到线性化的系统方程。
通过求解线性化系统方程的特征值,可以判断系统的稳定性。
特征值的实部大于零,则系统不稳定;特征值的实部小于零,则系统稳定;特征值的实部等于零,则需要进一步分析。
除了线性化方法外,还有一些其他的稳定性判定方法,如李雅普诺夫稳定性判据和拉普拉斯变换法等。
这些方法各有特点,可以根据具体问题选择适合的方法进行稳定性判定。
二、优化方法离散力学系统的优化是指通过调整系统的参数或结构,使得系统在给定的性能指标下达到最优状态。
离散力学系统的优化问题可以分为单目标优化和多目标优化两种情况。
在单目标优化中,我们需要确定一个性能指标,如系统的能量消耗最小或者系统的振动幅度最小等。
通过建立数学模型,可以利用数值优化方法,如梯度下降法和遗传算法等,求解优化问题的最优解。
而在多目标优化中,我们需要考虑多个性能指标的综合效果。
多目标优化问题的解决方法有很多种,如加权和法、Pareto最优解法等。
这些方法可以帮助我们找到系统在多个性能指标下的最优解。
除了数值优化方法外,还有一些启发式算法,如模拟退火算法和粒子群算法等,可以用于求解离散力学系统的优化问题。
这些算法通过模拟自然界的某些行为,如退火过程和鸟群飞行等,来搜索最优解。
综上所述,离散力学系统的稳定性判定和优化是一个重要的研究领域。
通过合适的稳定性判定方法,可以判断系统的稳定性,并采取相应的措施进行修正。
而通过优化方法,可以使系统在给定的性能指标下达到最优状态。
§ 5、4 离散时间系统状态稳定性及判别法 1、 离散时间系统的平衡状态(点) 设0(1)(),(0),0,1,2,,x k Ax k x x k +===L (5、17)称=e Ax 0的e x 为(5、17)的平衡状态(点)、 当A 奇异时, 有无数个平衡状态、 2、 平衡状态(点)的稳定性(1)稳定:∀>∃>0,0εδ,使当-<e x x 0δ时,有-<≥e x k x k (),0ε;(2)渐近稳定:∃>0δ,使当-<e x x 0δ时,有→∞-=e k x k x lim ()0;(3)全局渐近稳定:任意∈nx 0R ,都有→∞-=e k x k x lim ()0;(4)不稳定:∃>00ε, 无论δ 多小正数, 总有>k 10, 使->e x k x 10()ε对定常系统, 渐近稳定 全局一致渐近稳定、 3、稳定性判别对定常系统(1)()x k Ax k +=若0e x =稳定(渐近稳定),则其它e x 也稳定(渐近稳定);若0e x =渐近稳定,则e x 必为一致全局渐近稳定; 简单介绍0e x =稳定性条件 设(5、17)的解==kx k A x k 0(),0,1,2,L则渐近稳定⇔→∞→∞-==kk k x k A x 0lim ()0lim 0(≠x 00),⇔→∞=k k A lim 0⇔-→∞=k k TJ T1lim 0⇔→∞=kk J lim 0⇔A 的所有特征值的模全小于1⇔A 的所有特征值都位于复平面上的单位圆内、其中J为A的若当形、如11......k kkkr r J JJJ J⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦且再如11221111001000000k k kkk kk k kkkC CJ Cλλλλλλλλλ---⎡⎤⎡⎤⎢⎥⎢⎥==→⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⇔A的所有特征值的模全小于1⇔A 的所有特征值都位于复平面上的单位圆内、 例 设A 有互不相同特征值n 12,,,λλλL , 则T , 使⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦kkk kk n n A T T T T 112-1-12λλλλλλOO由此可得→∞<=⇔==ki i k i n i n ||1,1,2,,lim 0,1,2,,λλL L→∞⇔=kk A lim 0、定理5、12 系统为(5、17)的稳定性判定如下: (i) 0e x =稳定⇔A 所有特征值的模全s 小于1或等于1,且模等于1的特征值对应的约当块就是一阶的; (ii) 0e x =渐近稳定⇔A 的所有特征值模全小于1、 对一般非线性系统+==x k F x k k (1)(()),0,1,2,L (5、18)在=e x 0(设=F (0)0)的稳定性判定方法有定理5、13 对(5、18), 若()x k 的标量函数V x k ((()),满足(i) V x k (())为正定;(ii) ()=+-V x k V x k V x k (())((1))(())∆负定; (iii) 当→∞x k ||()||时,有→∞V x k ((())、 则=e x 0全局渐近稳定的、 若无(iii), 则=e x 0就是渐近稳定的;再若(ii)中V x k (())∆为半负定, 则=e x 0仅就是稳定的、 定理用于定常系统(5、17), 即得定理5、14 线性定常离散(5、17)的=e x 0为渐近稳定⇔对∀Q > 0, 李雅普诺夫方程-=-TA PA P Q有唯一正定解P 证只证充分性,即已有对∀Q > 0, -=-TA PA P Q 有唯一解0P >, 令=T k kk V x x Px (), 则有+++=-=-T T k k k k k kk V x V x V x x Px x Px 111()()()∆=-=-T TT kk kk x A PA P x x Qx (),显见k V x ()∆为负定, 故=e x 0渐近稳定、例5、6 设⎡⎤+=⎢⎥⎣⎦a x k x kb 0(1)()0 试分析稳定的条件、解 选Q = I , 则有-=-TA PA P I , 即 -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦p p p p a a p p p p b b 111211122122212200100001 整理且比较, 得,1)1(,0)1(,1)1(22212211=-=-=-b p ab p a p要P 为正定, 需满足<<a b ||1,||1, (5、19)解出===--p p p ab1112222211,0,11, =e x 0一致全局渐近稳定、实质上:<<a b ||1,||1⇔所有特征值的模全小于1、。