离散系统稳定性分析
- 格式:doc
- 大小:189.00 KB
- 文档页数:7

2-d 连续-离散系统的稳定性、可控性与可观测性判据
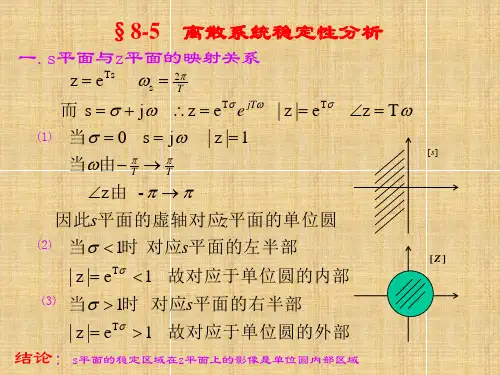
一、稳定性
连续离散系统稳定性是指系统状态值不断变化,但随着时间的推移,系统的解不会离开某一区域或范围,满足系统的平衡。
可以用Lyapunov准则来判断一个系统的稳定性,即找出一个函数V,系统的长期行为是满足V的进行,且由此可以确定系统的长期行为的变化趋势。
此外,系统稳定性还可以通过极点分析方法来判断,即系统极值处被定义为极点,并从中探索该系统在极点上是否稳定,以及该极点处系统解是否存在漂移和消失。
二、可控性
可控性是指系统的响应是通过控制器实现的,系统可以通过增加输入电压或输出力量来改变系统的输出响应,从而达到预期的解决方案。
可控性分析要求系统具有足够的响应能力,可以通过增加输入电压来改变系统的行为,但它的响应有限制,不能随意增加,而且可能受外界环境约束。
三、可观测性
可观测性是指系统的特性是可以通过测量来获取的,即可以观察系统的特性,推断出它是如何变化的,并且根据以往所观察到的特征来推测它在将来的变化趋势。
可观测性分析可以使用状态空间方程,用于获得关于系统的当前及未来设计状态的量化描述,从而确定系统的特征及其变化趋势。
实验一 离散系统稳定性分析实验学时:2 实验类型:常规 实验要求:必作一、实验目的:(1)掌握利用MATLAB 绘制系统零极点图的方法; (2)掌握离散时间系统的零极点分析方法;(3)掌握用MATALB 实现离散系统频率特性分析的方法; (4)掌握逆Z 变换概念及MATLAB 实现方法; (5)掌握用MATLAB 分析离散系统稳定性。
二、实验原理:1、离散系统零极点图及零极点分析;线性时不变离散系统可用线性常系数差分方程描述,即()()NMiji j a y n i b x n j ==-=-∑∑ (8-1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(8-1)两边进行Z 变换的00()()()()()Mjjj Nii i b zY z B z H z X z A z a z-=-====∑∑ (8-2) 将式(8-2)因式分解后有:11()()()Mjj Nii z q H z Cz p ==-=-∏∏ (8-3)其中C 为常数,(1,2,,)j q j M =为()H z 的M 个零点,(1,2,,)i p i N =为()H z 的N个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性:● 系统单位样值响应()h n 的时域特性; ● 离散系统的稳定性;离散系统的频率特性; 1.1、零极点图的绘制设离散系统的系统函数为则系统的零极点可用MA TLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
如多项式为231()48B z z z =++,则求该多项式根的MA TLAB 命令为为: A=[1 3/4 1/8];P=roots(A) 运行结果为: P =-0.5000 -0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。
离散时间系统的可控性及其稳定性分析研究一、引言离散时间系统(discrete-time system)是指在时间上取样的系统,指的是在时域上离散且在幅度上是连续的信号,是一类重要的时域系统。
在日常生活中,我们常常会遇到离散时间系统,例如数字电子、数字通信、数字信号处理等领域。
离散时间系统的可控性及其稳定性是该领域热门的研究方向之一,本文将从两方面进行探讨。
二、离散时间系统的可控性1.可控性的定义可控性是指系统在一定时间内,能否通过其输入信号来达到所需状态,并且可以在该状态下保持一定的时间。
在离散时间系统中,可控性的定义与连续时间系统中的可控性类似,但并不能简单地借鉴连续时间系统的定义。
2.可控性的判定(1)Kalman条件Kalman条件是判定离散时间系统可控性的重要方法。
在离散时间系统中,若一个初态能够通过一个有限时间内的控制输入到达系统的任意状态,则称该系统是可控的。
用数学语言描述,即离散时间系统可控的条件是:矩阵 Cont(A,B) 的秩等于 n,其中 A 和B 是系统的状态矩阵和输入矩阵,n 是系统的状态维数。
(2)PBH条件PBH条件是判定离散时间系统可控性的另一种方法。
与Kalman条件相比,PBH条件更加简便,适用于各种规范矩阵A和B.给定一个离散时间系统,我们可以将可控性矩阵写成:$$ \begin{bmatrix} A - \lambda_i I & B \end{bmatrix} $$式中,I 是单位矩阵,λi 是系统的特征值,B 是系统的输入矩阵。
若该矩阵的秩等于系统状态维数 n,则该系统可控。
三、离散时间系统的稳定性1.稳定性的定义稳定性是指系统输入和状态状态在有限范围内的变化,系统的输出也会随之保持在一个有限的范围。
2.稳定性的性质(1)稳定性的充分条件离散时间系统可控的充分条件是系统的特征值均在单位圆内。
(2)稳定性的判定常用的离散时间系统稳定性判定方法有 Jury准则和Nyquist准则。
线性离散控制系统的稳定性分析在控制工程中,稳定性是占据重要地位的概念之一。
对于线性离散控制系统而言,稳定性分析显得尤为关键。
在本文中,我们将讨论线性离散控制系统的稳定性分析。
线性离散控制系统由两个部分组成,一个是系统本身,另一个是控制器。
这两个部分共同作用,以使系统能够正常运行,达到预定的控制目标。
而稳定性则是在这一过程中,确保系统在特定的条件下能够保持稳定。
线性离散控制系统一般是在时刻 t 时,通过一个输入信号 u(t) 来控制输出信号 y(t)。
由此可以得到系统的状态空间方程式:x(t+1) = Ax(t) + Bu(t)y(t) = Cx(t)其中,x(t) 是状态向量,它包含系统中所有的状态信息。
A 和B 是状态转移矩阵,用于描述状态向量在时间上的演变。
C 则是输出端的转移矩阵,用于描述系统输出与状态向量之间的关系。
而 u(t) 则是控制器的输入信号,通过控制器的处理,最终得到系统的输出 y(t)。
对于任意给定的系统,其稳定性是需要依据系统本身的特性来分析的。
这里我们将从两个方面来讨论线性离散控制系统的稳定性分析。
分别为:利用特征值和易于分析的特殊情况。
一、利用特征值进行稳定性分析通过特征值,可以很方便地判断一个系统是否稳定。
特征值的计算公式如下:det(A-λI) = 0其中,det() 是矩阵的行列式,A 是状态转移矩阵,λ 是特征值,I 是单位矩阵。
特征值通常是由状态转移矩阵的特征多项式所产生的根。
如果计算出来的特征值都处于单位圆内,那么这个系统就是稳定的。
反之,如果特征值的模超过了 1,则这个系统就是不稳定的。
此外,还存在一种特殊情况,即状态转移矩阵的特征值都是实数。
在这种情况下,我们只需要检测特征值是否位于区间 [-1,1] 中即可。
如果全部都满足此条件,那么系统就是稳定的。
二、特殊情况下的稳定性分析对于线性离散控制系统而言,有一些特殊情况下可以使用更为简便的方法来进行稳定性分析。
离散时间系统的稳定性分析离散时间系统是一种在离散时间点上进行状态变化的系统,与连续时间系统相对应。
稳定性分析是对系统行为的一个重要特征进行评估和判断的过程。
对于离散时间系统的稳定性分析,我们可以通过不同方法进行研究和判断,如利用差分方程、状态空间法、Lyapunov稳定性理论等。
本文将从这些角度出发,深入探讨离散时间系统的稳定性分析方法。
一、差分方程法差分方程法是一种基于离散时间点上变量之间的差分关系进行稳定性分析的方法。
对于离散时间系统,我们可以通过建立差分方程来描述系统的动态行为。
一般而言,稳定的离散时间系统在各个时间点上的状态变量都保持在某个有界范围内。
因此,我们可以通过差分方程的解析解或数值解来判断系统的稳定性。
二、状态空间法状态空间法是一种通过描述系统在不同离散时间点上状态变化的方法。
在状态空间中,系统的状态由一组关于时间的差分方程表示。
通过对系统状态进行迭代,我们可以从初始状态推导出系统在未来时间点上的状态。
根据这些状态的变化,我们可以判断系统是否稳定。
三、Lyapunov稳定性理论Lyapunov稳定性理论是一种通过利用Lyapunov函数来判断离散时间系统稳定性的方法。
Lyapunov函数是一个用于衡量系统状态的能量函数,它在系统稳定时具有稳定性的性质。
通过构造和分析Lyapunov函数,我们可以判断离散时间系统是否稳定。
如果能够找到一个Lyapunov函数,使得对于系统的每一个状态,该函数都是非负的,并且沿着系统的状态变化轨迹递减,那么系统就是稳定的。
四、其他稳定性分析方法除了以上介绍的几种常见方法外,还存在其他一些稳定性分析方法,如频率域方法、随机系统稳定性分析等。
这些方法可以根据具体问题的需求进行选择和应用,从而更好地评估离散时间系统的稳定性。
综上所述,离散时间系统的稳定性分析是研究系统动态行为的一个重要问题。
通过差分方程法、状态空间法、Lyapunov稳定性理论以及其他稳定性分析方法,我们可以对离散时间系统的稳定性进行全面评估和判断。
离散控制系统的稳定性分析与设计离散控制系统(Discrete Control System)是指将时间划分为离散的、不连续的间隔,并且系统的状态在这些间隔中发生改变的一种控制系统。
离散控制系统广泛应用于各种领域,如工业控制、自动化、机器人技术等。
在设计离散控制系统时,稳定性是一个至关重要的考虑因素。
本文将介绍离散控制系统的稳定性分析与设计。
一、离散控制系统的基本概念离散控制系统由离散信号和离散时间组成。
离散信号是在某一离散时刻上的取值是确定的,而在两个离散时刻之间则可以是任意值。
离散时间是指系统的状态在一系列离散时刻上发生变化。
离散控制系统与连续控制系统相比,更适用于数字化和计算机控制领域。
二、离散控制系统的稳定性分析离散控制系统的稳定性指系统对于输入信号的扰动具有一定的容忍度,系统能够维持在某一稳定状态而不产生不稳定的振荡。
稳定性分析是为了保证离散控制系统的正常工作和控制效果。
常用的稳定性分析方法包括传输函数法、根轨迹法和Lyapunov稳定性方法等。
1. 传输函数法传输函数法是一种基于系统的输入和输出之间的关系来分析稳定性的方法。
通过建立系统的传输函数,可以用频域的分析方法来判断系统的稳定性。
传输函数是输入变量和输出变量之间的比例关系,通常用拉普拉斯变换表示。
2. 根轨迹法根轨迹法是一种几何法,通过追踪系统传输函数的所有极点随参数变化而在复平面上运动的路径,分析系统的稳定性。
当系统的所有极点位于左半平面时,系统是稳定的。
3. Lyapunov稳定性方法Lyapunov稳定性方法是一种基于Lyapunov函数的方法,通过构造Lyapunov函数来分析系统的稳定性。
Lyapunov函数是一个实值函数,满足一定的条件,可以确定系统的稳定性。
若系统的Lyapunov函数对于所有的非零初始条件都是非负的,则系统是稳定的。
三、离散控制系统的稳定性设计在离散控制系统的设计过程中,稳定性是至关重要的考虑因素。
离散控制系统中的稳定性与鲁棒性分析离散控制系统是指由离散时间运行的控制系统,它采样输入和输出信号来完成控制功能。
稳定性和鲁棒性是离散控制系统设计中非常关键的问题,本文将对离散控制系统中的稳定性与鲁棒性进行详细分析。
一、稳定性分析稳定性是指在系统的输入和输出之间存在一种平衡状态,系统能够对输入信号作出适当的响应而不发生不可控制或不可预测的震荡或发散。
稳定性分析主要有零极点分布、Nyquist稳定判据和位置根判据等方法。
1. 零极点分析离散系统的稳定性与其极点的位置有关。
通常采用单位脉冲响应函数H(z)的零极点分布来分析系统的稳定性。
对于一阶离散系统而言,它的极点位置应满足|z|<1的条件才能保证系统的稳定性。
对于高阶系统,可以通过复平面法或者根轨迹法来分析系统的稳定性。
2. Nyquist稳定判据Nyquist稳定判据是通过绘制Nyquist图来判断系统的稳定性。
根据Nyquist稳定判据,如果系统的传输函数H(z)的极点都位于单位圆内,那么系统是稳定的。
否则,系统将会出现振荡或发散的现象。
3. 位置根判据位置根判据是通过对系统的传输函数进行倒数操作,然后判断所得到的新系统的极点位置来评估系统的稳定性。
位置根判据的基本思想是,如果倒数系统的极点位于单位圆外,那么原系统是稳定的。
二、鲁棒性分析鲁棒性是指系统具有对参数变化、环境变化或非线性因素的强鲁棒性,即保持系统的性能特性不因外界因素变化而发生较大改变。
在离散控制系统中,鲁棒性分析主要有灵敏度函数法、小增益界定理和鲁棒优化等方法。
1. 灵敏度函数法灵敏度函数法是通过构造灵敏度函数来分析系统的鲁棒性。
灵敏度函数可以用来评估系统对参数变化的敏感性。
如果灵敏度函数的幅值比较小,说明系统对参数变化不敏感,具有较好的鲁棒性。
2. 小增益界定理小增益界定理是一种常用的鲁棒性分析方法。
它基于系统的复值矩阵进行分析,通过确定复值矩阵的边界来评估系统的鲁棒性。
离散控制系统的稳定性分析与设计方法离散控制系统的稳定性是控制工程中一个非常重要的概念,它涉及到系统的可靠性和性能。
本文将介绍离散控制系统的稳定性分析与设计方法,并讨论如何确保系统的稳定性。
一、稳定性分析离散控制系统的稳定性分析是通过对系统传递函数进行分析来确定系统是否稳定。
常用的稳定性判据有两种:时域方法和频域方法。
1. 时域方法时域方法是通过分析系统的时域响应来确定系统的稳定性。
具体方法有零极点判据和步响应法。
零极点判据是通过确定系统传递函数的零点和极点位置来判断系统的稳定性。
一般来说,当系统的所有极点都位于单位圆内部时,系统是稳定的。
步响应法通过观察系统的步响应图来判断系统的稳定性。
当系统的步响应图趋于稳定状态并在有限时间内收敛到稳定值时,系统是稳定的。
2. 频域方法频域方法是通过分析系统的频率特性来确定系统的稳定性。
常用的频域方法有Nyquist判据和Bode图法。
Nyquist判据是通过绘制系统的Nyquist图来判断系统的稳定性。
当系统的Nyquist图不通过虚轴右半平面时,系统是稳定的。
Bode图法是通过绘制系统的Bode图来判断系统的稳定性。
当系统的幅频特性曲线和相频特性曲线满足一定条件时,系统是稳定的。
二、稳定性设计稳定性设计是通过设计控制器的参数来确保系统的稳定性。
通常有两种常见的设计方法:根轨迹法和PID控制器。
1. 根轨迹法根轨迹法是通过绘制根轨迹图来设计控制器的参数。
根轨迹图可以直观地显示系统的稳定性和性能。
设计过程中,可以根据系统的要求来调整控制器的参数,使得系统的根轨迹满足要求。
2. PID控制器PID控制器是一种常用的控制器,它包括比例、积分和微分三个部分。
PID控制器的设计可以根据系统的特性和需求来确定各个参数的取值。
比例部分可以控制系统的静态误差,积分部分可以消除系统的稳态误差,微分部分可以提高系统的动态响应。
通过合理地调整PID控制器的参数,可以实现系统的快速响应和稳定性。
离散控制系统的稳定性分析离散控制系统是一种由离散时间事件驱动的系统,它在控制工程中起着重要的作用。
稳定性分析是离散控制系统设计中的关键步骤,它可以帮助我们确定系统是否能够保持在稳定状态,并达到预期的控制效果。
本文将讨论离散控制系统的稳定性分析方法和应用。
1. 离散控制系统概述离散控制系统是一种以时序离散的方式进行操作和控制的系统。
它由输入、输出和状态三个主要部分组成。
其中,输入是指系统接收来自外部的信号或信息,输出是指系统作为响应产生的结果,状态是指系统在运行过程中的内在特征。
2. 稳定性的概念和分类稳定性是指系统在输入变化或干扰下是否能够保持有限范围内的响应。
离散控制系统的稳定性可以分为绝对稳定性和相对稳定性两种情况。
绝对稳定性:系统在任何情况下都能保持有限范围内的响应,不会出现不受控制或不可预测的振荡或失控现象。
相对稳定性:系统在特定条件下能够保持有限范围内的响应,但可能受到输入变化或干扰的影响而出现逐渐增大的响应。
3. 稳定性分析方法离散控制系统的稳定性分析可以使用多种方法,以下是几种常用的方法:3.1 传递函数法传递函数是离散控制系统中描述输入输出关系的数学模型。
通过将系统表示为传递函数的形式,可以使用极点、零点、阶跃响应等特征来分析系统的稳定性。
例如,当系统的所有极点都位于单位圆内时,系统是稳定的。
3.2 极坐标法极坐标法是一种绘制离散控制系统零极点的图形方法。
通过绘制零极点在单位圆上的位置,可以直观地判断系统的稳定性。
如果所有极点都位于单位圆内,系统是稳定的。
3.3 稳定性判据法稳定性判据法是一种通过计算系统的稳定性判据来判断系统的稳定性的方法。
常用的稳定性判据包括李雅普诺夫稳定性判据、M行列稳定性判据等。
这些判据可以通过计算系统的特征值或特征向量来得到。
4. 稳定性分析的应用稳定性分析在离散控制系统设计和调试过程中有着广泛的应用。
它可以帮助工程师确定系统参数,设计合适的控制策略,并提供有效的故障诊断方法。
离散力学系统的稳定性判定与优化离散力学系统是一类重要的力学系统,它由一系列离散的质点或刚体组成,通过相互作用力而产生运动。
在实际应用中,我们常常需要对离散力学系统进行稳定性判定和优化,以确保系统的可靠性和效率。
一、稳定性判定在离散力学系统中,稳定性判定是指系统在给定条件下是否能保持平衡或者稳定运动的能力。
稳定性判定的方法有很多种,其中一种常用的方法是通过线性化系统方程来进行判断。
线性化是一种常用的数学方法,它将非线性系统方程在某一点附近进行近似,得到线性化的系统方程。
通过求解线性化系统方程的特征值,可以判断系统的稳定性。
特征值的实部大于零,则系统不稳定;特征值的实部小于零,则系统稳定;特征值的实部等于零,则需要进一步分析。
除了线性化方法外,还有一些其他的稳定性判定方法,如李雅普诺夫稳定性判据和拉普拉斯变换法等。
这些方法各有特点,可以根据具体问题选择适合的方法进行稳定性判定。
二、优化方法离散力学系统的优化是指通过调整系统的参数或结构,使得系统在给定的性能指标下达到最优状态。
离散力学系统的优化问题可以分为单目标优化和多目标优化两种情况。
在单目标优化中,我们需要确定一个性能指标,如系统的能量消耗最小或者系统的振动幅度最小等。
通过建立数学模型,可以利用数值优化方法,如梯度下降法和遗传算法等,求解优化问题的最优解。
而在多目标优化中,我们需要考虑多个性能指标的综合效果。
多目标优化问题的解决方法有很多种,如加权和法、Pareto最优解法等。
这些方法可以帮助我们找到系统在多个性能指标下的最优解。
除了数值优化方法外,还有一些启发式算法,如模拟退火算法和粒子群算法等,可以用于求解离散力学系统的优化问题。
这些算法通过模拟自然界的某些行为,如退火过程和鸟群飞行等,来搜索最优解。
综上所述,离散力学系统的稳定性判定和优化是一个重要的研究领域。
通过合适的稳定性判定方法,可以判断系统的稳定性,并采取相应的措施进行修正。
而通过优化方法,可以使系统在给定的性能指标下达到最优状态。
离散控制系统的稳定性分析方法离散控制系统是指系统状态的变化是以离散的方式进行的控制系统。
在实际工程中,我们经常需要对离散控制系统进行稳定性分析,以确保系统的可靠性和正常工作。
本文将介绍几种常用的离散控制系统的稳定性分析方法。
一、特征方程法特征方程法是离散控制系统稳定性分析中使用最广泛的方法之一。
特征方程反映了离散系统的稳态响应特性。
对于一个线性离散控制系统,其特征方程可以通过以下公式表示:G(z) = N(z)/D(z)其中,N(z)和D(z)分别是分子和分母多项式。
为了分析系统的稳定性,我们需要求解特征方程的根。
通常情况下,离散系统稳定的充要条件是特征方程的所有根的模都小于1。
二、相位平面法相位平面法是另一种常用的离散控制系统稳定性分析方法。
通过绘制系统的相位平面图,我们可以直观地了解系统的稳定性。
相位平面图以根轨迹的形式表示,根轨迹是特征方程的根随着参数的改变而移动的轨迹。
相位平面图的绘制过程可以通过以下步骤完成:1. 根据特征方程,将根轨迹的初始点和终点确定在单位圆上;2. 根据特征方程的根的个数,确定根轨迹的曲线走向;3. 绘制根轨迹,并观察根轨迹与单位圆的交点。
通过相位平面法,我们可以直观地判断系统的稳定性。
当根轨迹上的点都位于单位圆内部时,系统为稳定。
而当根轨迹上的点位于单位圆外部时,系统为不稳定。
三、频域法频域法是利用频率响应函数来分析系统稳定性的方法。
频率响应函数是指在系统输入为正弦信号时,输出的幅值和相位与输入频率之间的关系。
常用的频域法包括傅里叶变换法、拉普拉斯变换法等。
在频域法中,我们可以通过绘制系统的频率响应曲线来分析系统的稳定性。
通常情况下,稳定的离散控制系统的频率响应曲线在低频段有较大的增益,而在高频段有较小的增益。
综上所述,离散控制系统的稳定性分析方法包括特征方程法、相位平面法和频域法等。
不同的方法适用于不同的系统,我们可以根据实际需求选择合适的方法进行分析。
通过稳定性分析,我们可以确保离散控制系统的可靠性和正常运行。
实验一 离散系统稳定性分析实验学时:2 实验类型:常规 实验要求:必作一、实验目的:(1)掌握利用MATLAB 绘制系统零极点图的方法; (2)掌握离散时间系统的零极点分析方法;(3)掌握用MATALB 实现离散系统频率特性分析的方法; (4)掌握逆Z 变换概念及MATLAB 实现方法; (5)掌握用MATLAB 分析离散系统稳定性。
二、实验原理:1、离散系统零极点图及零极点分析;线性时不变离散系统可用线性常系数差分方程描述,即()()NMiji j ay n i bx n j ==-=-∑∑ (8-1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(8-1)两边进行Z 变换的00()()()()()Mjjj N i ii bzY z B z H z X z A z a z-=-====∑∑ (8-2)将式(8-2)因式分解后有:11()()()Mjj Ni i z qH z Cz p ==-=-∏∏ (8-3) 其中C 为常数,(1,2,,)j q j M = 为()H z 的M 个零点,(1,2,,)i p i N = 为()H z 的N 个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性:● 系统单位样值响应()h n 的时域特性; ●离散系统的稳定性;离散系统的频率特性;1.1、零极点图的绘制设离散系统的系统函数为()()()B z H z A z =则系统的零极点可用MA TLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
如多项式为231()48B z z z =++,则求该多项式根的MA TLAB 命令为为:A=[1 3/4 1/8]; P=roots(A)运行结果为: P =-0.5000-0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。
这两种方式在构造多项式系数向量时稍有不同。
(1)()H z 按z 的降幂次序排列:系数向量一定要由多项式最高次幂开始,一直到常数项,缺项要用0补齐;如34322()3221z zH z z z z z +=++++其分子、分母多项式系数向量分别为A=[1 0 2 0]、B=[1 3 2 2 1]。
(2)()H z 按1z -的升幂次序排列:分子和分母多项式系数向量的维数一定要相同,不足的要用0补齐,否则0z =的零点或极点就可能被漏掉。
如11212()11124z H z zz---+=++其分子、分母多项式系数向量分别为A=[1 2 0]、B=[1 1/2 1/4]。
用roots()求得()H z 的零极点后,就可以用plot()函数绘制出系统的零极点图。
下面是求系统零极点,并绘制其零极点图的MA TLAB 实用函数ljdt(),同时还绘制出了单位圆。
function ljdt(A,B)% The function to draw the pole-zero diagram for discrete systemp=roots(A); %求系统极点 q=roots(B); %求系统零点 p=p'; %将极点列向量转置为行向量q=q'; %将零点列向量转置为行向量 x=max(abs([p q 1])); %确定纵坐标范围 x=x+0.1; y=x;%确定横坐标范围clfhold onaxis([-x x -y y])%确定坐标轴显示范围w=0:pi/300:2*pi; t=exp(i*w); plot(t) %画单位园axis('square') plot([-x x],[0 0])%画横坐标轴 plot([0 0],[-y y])%画纵坐标轴text(0.1,x,'jIm[z]')text(y,1/10,'Re[z]')plot(real(p),imag(p),'x')%画极点plot(real(q),imag(q),'o') %画零点 title('pole-zero diagram for discrete system') %标注标题 hold off1.2、离散系统零极点分析(1)离散系统零极点分布与系统稳定性 离散系统稳定的条件为:时域条件:离散系统稳定的充要条件为()n h n ∞=-∞<∞∑,即系统单位样值响应绝对可和;Z 域条件:离散系统稳定的充要条件为系统函数()H z 的所有极点均位于Z 平面的单位圆内。
对于三阶以下的低阶系统,可以利用求根公式求出系统函数的极点,从而判断系统的稳定性,但对于高阶系统,手工求解则显得十分困难,这时可以利用MA TLAB 来实现。
实现方法是调用前述的函数ljdt()绘出系统的零极点图,然后根据极点的位置判断系统的稳定性。
2、离散系统频率特性分析;2.1、离散系统的频率响应()j H eω对于某因果稳定离散系统,如果激励序列为正弦序列:0()sin()()x n A n u n ω=则系统的稳态响应为:()()sin[()]()j ss y n A H en u n ωωϕω=+定义离散系统的频率响应为()()()()j j j j z eH eH z H eeωωωϕω===其中,()j H e ω——称为离散系统的幅频特性; ()ϕω——称为离散系统的相频特性;()j H eω是以2π为周期的周期函数,只要分析()j H e ω在ωπ≤范围内的情况,便可分析出系统的整个频率特性。
2.2、用MA TLAB 实现离散系统的频率特性分析方法 (1)直接法设某因果稳定系统的系统函数()H z ,则系统的频响特性为:()()()()j j j j z eH eH z H eeωωωϕω===MA TLAB 提供了专门用于求离散系统频响特性的函数freqz(),调用freqz()的格式有以下两种: ●[H,w]=freqz(B,A,N)B 和A 分别为离散系统的系统函数分子、分母多项式的系数向量,N 为正整数,返回量H 则包含了离散系统频响()j H eω在0~π范围内N 个频率等分点的值,向量w 则包含0~π范围内N 个频率等分点。
调用中若N 默认,默认值为512。
● [H,w]=freqz(B,A,N,’whole ’) 该调用格式将计算离散系统在0~2π范围内N 个频率等分点的频率响应()j H eω的值。
因此,可以先调用freqz()函数计算系统的频率响应,然后利用abs()和angle()函数及plot()函数,即可绘制出系统在0~π或0~2π范围内的频响曲线。
(2)几何矢量法利用几何矢量求解示意图如图8-4所示。
jj j j j eq B eψω-= ij j i i ep A eθω-=有:1212()1()()1()()M N Mj jj j j j Nj i i BeH eH eeA eψψψωωϕωθθθ+++=+++===∏∏则系统的幅频特性和相频特性分别为:11()Mjj j Nii BH eA ω===∏∏(8-7) 11()MNjij i ϕωψθ===-∑∑ (8-8)根据式(8-7)和(8-8),利用MA TLAB 来求解频率响应的过程如下: ● 根据系统函数()H z 定义分子、分母多项式系数向量B 和A ; ● 调用前述的ljdt()函数求出()H z 的零极点,并绘出零极点图; ● 定义Z 平面单位圆上的k 个频率分点;● 求出()H z 所有的零点和极点到这些等分点的距离; ● 求出()H z 所有的零点和极点到这些等分点矢量的相角; ● 根据式(8-7)和(8-8)求出系统的()j H e ω和()ϕω; ●绘制指定范围内系统的幅频曲线和相频曲线;下面是实现上述过程的实用函数dplxy()。
有四个参数:k 为用户定义的频率等分点数目;B 和A 分别为系统函数分子、分母多项式系数向量;r 为程序绘制的频率特性曲线的频率范围(0~r π⨯)。
function dplxy(k,r,A,B)%The function to draw the frequency response of discrete systemp=roots(A); %求极点 q=roots(B);%求零点figure(1) ljdt(A,B)%画零极点图 w=0:r*pi/k:r*pi; y=exp(i*w);%定义单位圆上的k 个频率等分点N=length(p); %求极点个数 M=length(q);%求零点个数 yp=ones(N,1)*y; %定义行数为极点个数的单位圆向量 yq=ones(M,1)*y;%定义行数为零点个数的单位圆向量vp=yp-p*ones(1,k+1); %定义极点到单位圆上各点的向量vq=yq-q*ones(1,k+1); %定义零点到单位圆上各点的向量 Ai=abs(vp); %求出极点到单位圆上各点的向量的模 Bj=abs(vq); %求出零点到单位圆上各点的向量的模 Ci=angle(vp);%求出极点到单位圆上各点的向量的相角 Dj=angle(vq); %求出零点到单位圆上各点的向量的相角 fai=sum(Dj,1)-sum(Ci,1); %求系统相频响应 H=prod(Bj,1)./prod(Ai,1);%求系统幅频响应figure(2)plot(w,H); %绘制幅频特性曲线title('离散系统幅频特性曲线') xlabel('角频率') ylabel('幅度') figure(3)plot(w,fai)title('离散系统的相频特性曲线') xlabel('角频率') ylabel('相位')三、实验方法和手段:集中授课,实验现场进行指导 四、实验组织运行要求:集中组织,单人单机 五、实验条件: 计算机、MATLAB 软件 六、实验步骤:1、打开计算机,双击桌面MATLAB 软件图标,进入MATLAB 工作环境;2、在命令窗口(Command Window )输入程序,按回车键执行。
3、按实验内容逐一编成,将运行结果存入 WORD 文档。
七、实验内容:1、离散系统零极点图及零极点分析;例1:绘制如下系统函数的零极点 (1)32323510()375z z z H z z z z -+=-+-(2)11210.5()31148z H z zz----=++解:MA TLAB 命令如下 (1) A=[1 -3 7 -5];B=[3 -5 10 0];ljdt(A,B) 运行结果:(2) A=[1 3/4 1/8];B=[1 -0.5 0]; ljdt(A,B)2、离散系统频率特性分析;例2:绘制如下系统的频响曲线0.5()z H z z-=解:MA TLAB 命令如下:B=[1 -0.5]; A =[1 0];[H,w]=freqz(B,A,400,'whole'); Hf=abs(H);Hx=angle(H);clf figure(1)plot(w,Hf)title('离散系统幅频特性曲线') figure(2)plot(w,Hx)title('离散系统相频特性曲线') 运行结果:例3:已知某离散系统的系统函数为:115/4(1)()11/4z H z z---=-绘出该系统的零极点图及频响特性。