应力应变关系
- 格式:doc
- 大小:285.04 KB
- 文档页数:9

钢材的应力应变关系
钢材的应力-应变关系是描述钢材在受力作用下的变形行为的关系。
一般来说,在弹性范围内,钢材的应力与应变呈线性关系,可以用胡克定律表示:
应力 = 弹性模量 ×应变
其中,弹性模量是指钢材在弹性变形阶段内的比例系数,用来描述材料的刚度和变形能力。
然而,当钢材超过其弹性极限时,弹性模量的数值不能再用于描述应力-应变关系。
钢材开始发生塑性变形,此时应力与应变之间的关系变得非线性。
塑性变形后,钢材可能会出现颈缩现象,并最终断裂。
需要注意的是,钢材的应力-应变关系还会受到其他因素的影响,如温度、应变速率等。
因此,在实际工程设计中,钢材的应力-应变关系往往需要通过实验或计算来确定,并考虑到各种因素的影响。




应力应变关系嘿,朋友!你知道啥是应力应变关系不?这就好比咱们跑步,脚用力蹬地,地面给咱们的反作用力就是应力,而咱们身体因为这力产生的变化,像肌肉的拉伸、关节的转动幅度,这就是应变。
应力和应变啊,它们就像是一对形影不离的好伙伴。
应力是施加在物体上的力,应变则是物体对这个力的反应。
你想想,要是用力拉一根橡皮筋,拉的力越大,橡皮筋被拉长的程度就越大,这拉的力就是应力,橡皮筋的拉长就是应变。
比如说造桥,工程师得清楚应力应变关系,要不然桥可能走着走着就塌啦!桥承受车辆的重量,这就是应力,桥身因为这重量产生的弯曲、变形就是应变。
要是不明白这两者的关系,桥能安全吗?再说说咱们常见的弹簧。
使劲压弹簧,压的力就是应力,弹簧被压缩的长度就是应变。
而且不同的材料,它们的应力应变关系可不一样。
像钢铁,能承受很大的应力才会产生明显的应变;而塑料呢,稍微给点力可能就变形得厉害。
这应力应变关系在生活中的应用那可多了去啦!就像做家具,得考虑木材能承受多大的力,变形到什么程度还能正常使用。
要是不了解,做出来的椅子说不定坐上去就嘎吱嘎吱响,甚至散架!还有建筑施工,要是不知道墙体材料的应力应变关系,万一遇上地震啥的,房子不就危险啦?在机械制造中,这应力应变关系更是关键。
零件的设计、加工,都得依照这个来,不然机器运转起来,零件出问题,那可就麻烦大了!总之,应力应变关系就像是生活中的密码,解开它,咱们才能更好地利用材料,制造出安全可靠的东西。
不重视它,那可就要吃大亏喽!所以,不管是搞工程的,还是咱们普通人,多了解了解这应力应变关系,准没错!。
流体力学中应力应变关系
流体力学中应力应变关系是指在流体中,应力和应变之间的关系。
应力是指流体中单位面积内受到的力,而应变则是指在受力下流体的形状和大小发生的变化。
在流体中,应力和应变之间的关系是非线性的,并且与流体的性质密切相关。
对于牛顿流体(即流体的粘度不随剪切速率变化的流体),应力
应变关系可以用简单的线性关系来描述。
这种情况下,应力是剪切应力,而应变则是剪切应变。
而对于非牛顿流体(即流体的粘度随剪切速率变化的流体),应力应变关系则更为复杂,需要使用更加复杂的
数学模型来描述。
在流体力学应用中,了解应力应变关系非常重要。
例如,工程师需要了解流体的应力应变关系,以便设计和优化流体系统。
此外,医生也需要了解流体的应力应变关系,以便更好地理解人体内的生理过程。
因此,流体力学中应力应变关系是一个非常重要的概念。
- 1 -。
我所认识的应力应变关系
一 在前面两章的分别学习了关于应力与应变的学习,第三章的本
构关系讲述了应力与应变的关系从而构成了弹塑性力学的本构关系。
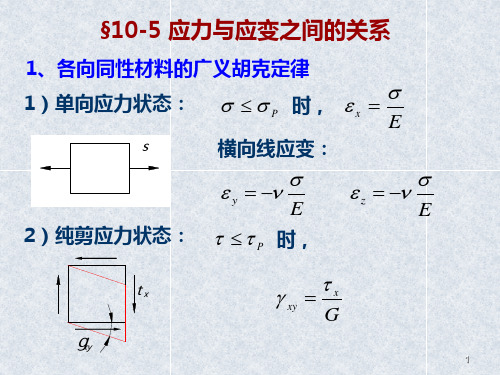
在单向应力状态下,理想的弹塑性材料的应力应变关系及其简单满足胡克定律即
εσ
X X
E =
在三维应力状态下需要9个分量,即应力应变需要9个分量,于是可以把单向应力应变关系推广到三维应力状态,及推广到广义的胡克定律
本式应该是91个应变分量 单由于切应力互等定理,此时后面的三个应力与式中的切应力想等即现在剩余36个应变分量。
(1)具有一个弹性对称面的线弹性体的应力应变公式如下
(2)正交各向异性弹性体的弹塑性体公式如下
(3)各向同性弹性体的本构方程
各向同性弹性体在弹性状态下,主应力方向与主应变方向重合容易证明。
在主应变空间里,由于应变主轴与应力主轴重合,各向同性弹性体体内任意一点的应力和应变之间满足:
111213x x y z
C C C σεεε=++ 212223y x y z C C C σεεε=++
313233z x y z
C C C σεεε=++ (2-3)
x ε对x σ的影响与y ε对y σ以及z ε对z σ的影响是相同的,即有
112233==C C C ;y ε和z ε对x σ的影响相同,即1213=C C ,同理有2123=C C 和
3132=C C 等 ,则可统一写为:
112233==C C C a =
122113312332=====C C C C C C b = (2-4)
所以在主应变空间里,各向同性弹性体独立的弹性常数只有2个。
在任意的坐标系中,同样可以证明弹性体独立的弹性参数只有2个。
广义胡可定律如下式
1[()]1[()]1[()]x x y z y y x z z z x y E E E εσνσσεσνσσεσνσσ⎧
=-+⎪⎪
⎪
=-+⎨⎪⎪=-+⎪⎩ 222xy xy yz yz zx zx G G G τγτγτγ⎧=⎪⎪⎪=⎨⎪
⎪=⎪⎩
v 泊松比 2(1)
E
G ν=
+剪切模量 E :弹性模量/杨氏模量 虎克定律
E G σε
τγ==
对于应变能函数理解有点浅在此就不多做介绍了。
2 屈服条件
拉伸与压缩时的应力——应变关系曲线
P A l l l στ=-=
BC CD DE ⎫⎪
⎬⎪⎭
:屈服阶段
:强化阶段塑性阶段:局部变形阶段
弹性变形时应力应变关系的特点
1.应力与应变完全成线性关系;即应力主轴与全量应变主轴重合
2.弹性变形是可逆的,与应变历史(加载过程)无关,即某瞬时的物体形状、尺寸只与该瞬时的外载有关,而与该瞬时之前各瞬间的载荷情况无关。
单向拉伸塑性变形下的应力-应变关系
1.应力、应变为非线性关系
2.塑性变化不可逆——无单值一一对应关系
3.对于应变硬化材料,卸载后的屈服应力比初始屈服应力高
弹塑性力学常用的简化模型 1. 理想弹性力学模型
E σε
=
2. 理想弹塑性力学模型
3. 线性强化弹塑性力学模型(双线性强化力学模型)
s s
s
E εεεσσεε≤⎧=⎨
>
⎩
4. 幂强化力学模型
n :强化指数:0 ≤ n ≤ 1
5. 理想塑性力学模型(刚塑性力学模型)
6. 线性强化刚塑性力学模型
塑性变形时应力和应变的关系
弹性力学是以应力与应变成线性关系的广义Hooke 定律为其基础的;而在塑性力学的范围内,一般来说,应力与应变间的关系是非线性的,同时这种非线性的特征,又与所研究的具体材料和塑性应变有关。
1()s s s s
E E εεεσσεεεε≤⎧
=⎨
+->
⎩n
A σε
=s
σσ
=1s E σσε
=
+
塑性变形过程中的应力应变关系十分复杂,相关的理论较多,但可将它们分为两大类,即增量理论和全量理论。
增量理论
在弹性极限范围内,弹性全量应变与当时的应力状态有确定的一一对应关系,而与加载的历程无关。
但由于塑性变形的不可恢复性,塑性全量应变与当时的应力状态不是单值关系,而与加载的历史有关。
因此,当材料发生塑性变形时,即使应力水平相同,不同加载历程所对应的应变值也会不同。
同样,对于同一应变值,不同加载历程所对应的应力值也会不同。
因此,只有明确了加载历程,才能得到应力应变间的对应关系。
既然塑性变形时的应变与加载历史有关,而且也不容易得到全量应变与应力状态间的对应关系,人们自然想到建立塑性变形每一瞬时应变增量与当时应力状态之间的关系,又因为金属塑性变形过程中体积的变化可以忽略,人们又会想到建立每一瞬时应变增量与当时应力偏量之间的关系,增量理论便建立了这样的关系,这里的“增量”指的是应变增量,是相对全量应变而言的。
增量理论又称流动理论,是历史上最早提出来的阐述塑性变形过程应力应变关系的理论,代表性的有Levy-Mises(列维-米赛斯)理论和Prandtl-Reuss(普朗特-劳斯)理论。
需要说明的是,Levy-Mises理论和Prandtl-Reuss理论都只能在加载的情况下使用,卸载时须按Hooke定律计算。
全量理论
全量理论又称形变理论,它所建立的是应力与应变全量之间的关系,这一点和弹性理论极为相似,但全量理论要求变形体受简单加载,即要求各应力分量在加载过程中按同一比例增加,因而变形体内各点的应力主轴方向不发生变化,显然,这一要求限定了全量理论的应用范围。
有代表性的全量理论是Hencky (汉基)理论和Ильющин(依留辛)简单加载定理。
在Hencky 和Nadai (纳代依)工作的基础上,A.Ильющин于1943年将形变理论的形式和所必须满足的条件进行了整理,提出了物体内每个单元都处于简单加载的具体条件,并认为物体处于简单加载状态,即当外荷载从一开始即按同一比例系数增加时,由形变理论计算的结果是正确的。
满足简单加载的四个具体条件是:
(1) 小变形,即塑性变形和弹性变形属于同一量级; (2) 12ν=,即材料为不可压缩体;
(3) 荷载(包括体力)按比例单调增长,变形体处于主动变形过程,即应力强度不断增加,在变形过程中不出现中间卸载的情况,如有位移边界条件,只能是零位移边界条件;
(4) 材料的应力——应变曲线具有n
e e A σε=的幂函数形式。
卸载时的应力应变关系
对于外力按比例减小的简单卸载,复杂应力状态下应力和应变分量的改变量之间也存在类似的线性关系。
由于加载时应力和应变改变量按弹塑性体计算,而卸载时则按弹性体计算,故当全部荷载卸除后物体内会有残余应力和应变存在,显然,其数值为卸载前后值之差。
四.加载条件加载和卸载准则
1.理想塑性材料加载和卸载
由于理想塑性材料的加载面和屈服面总是保持一致,所以,加载函数和屈服函数可以统一表示为
它们均与塑性变形的大小和加载历史无关。
于是,在荷载改变的过程中,如果应力点保持在屈服面上,即df=0,此时塑性变形可以任意增长,就称为加载。
当应力点从屈服面上退回屈服面内,即df<0,就表示变形状态从塑性变为弹性,此时不产生新的塑性变形,称为卸载。
理想塑性材料的上述加载和卸载准则,可以用数学形式表示为
2.强化材料加载、卸载
以上两式是对应力应变的简单的总结还需要进一步学习巩固理解。