弹塑性力学 第3章弹性与塑性应力应变关系
- 格式:ppt
- 大小:1.02 MB
- 文档页数:76

我所认识的应力和应变关系在这之前我认识了应力和应变的概念、性质以及从静力学和几何学的角度出发所得到的平衡方程和几何方程。
但是平衡方程仅反映了应力分量和外力分量的关系;几何方程仅建立了位移分量和应变分量的关系。
而谈到应力与应变的关系,对于可变形固体,在弹塑性力学中,在外力的作用下,其将发生变形。
变形分为两个阶段,弹性阶段和塑性阶段。
在弹性阶段,发生的弹性变形可以完全恢复,它是一个可逆过程。
此时,应力与应变的关系是一一对应的,是单值函数关系。
而在塑性阶段,所发生的塑性变形是不可以恢复的,是不可逆过程。
相对应的,塑性阶段的应力应变的关系是非线性关系,不存在一一对应的关系。
我所认识的应力和应变的关系就是本构关系。
本构关系也称为物理关系,它反应的是可变形材料的固有属性,实质上是一组联系力学参数和运动参数的方程式,也就是我们所说的本构方程。
在说应力与应变的关系之前,先说一下本构关系的相关影响因素,包括材料、环境、加载类型、以及加载速度。
即,),,(T t f εσ=。
另外,有各种各样的本构系,比如:弹性本构关系、塑性本构关系、粘弹性本构关系、粘塑性本构关系、各向同性本构关系、各向同性本构关系等等。
简单情况的本构关系:应力和应变的关系包括弹性和塑性的应力应变关系。
我们所说的是线性弹性体的应力应变关系,又分为简单应力状态和复杂应力状态。
在简单拉伸情况下,理想弹性材料的应力和应变的关系很简单,就是材料力学中的胡克定律: 。
而在塑性阶段,应力应变之间不再是简单的胡克定律,而是 。
另外,简单拉伸情况下的卸载定律是 。
在后继弹性阶段,也就是卸载后重新加载的材料会继续发生新的塑性变形,在此时的屈服称为后继屈服,相应的屈服点称为后继屈服点。
初始屈服和后继屈服的不同是:第一,应力的数值不一样,后继屈服的应力值更大;第二,屈服点的个数不一样。
初始屈服点只有一个,而后继屈服点会有好多个,则其对应的应力值也会有很多个。
最后,在卸载全部载荷后进行反向加载比如说把拉伸改成压缩,此时会产生Bauschinger 效应。
第三章 应变状态理论在外力、温度变化或其他因素作用下,物体内部各质点将产生位置的变化,即发生位移。
如果物体内各点发生位移后仍保持各质点间初始状态的相对位置,则物体实际上只发生了刚体平移和转动,这种位移称为刚体位移。
如果物体各质点发生位移后改变了各点间初始状态的相对位置,则物体同时也产生了形状的变化,其中包括体积改变和形状畸变,物体的这种变化称为物体的变形运动或简称为变形,它包括微元体的纯变形和整体运动。
应变状态理论就是研究物变形后的几何特性。
即给定物体内各点变形前后的位置,确定无限接近的任意两点之间所连矢量因物体变形所引起剧烈变化。
这是一个单纯的几何问题,并不涉及物体变形的原因,也就是说并不涉及物体抵抗变形的物理规律。
本章主要从物体变形前后的几何变化论述物体内一点的应变状态。
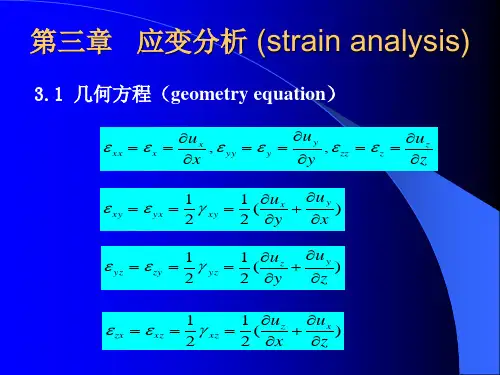
位移与线元长度、方向的变化坐标与位移设变形前物体上各点的位置在笛卡尔坐标(Descarter coordinate)系的轴(X 、、Y、Z )上的投影为(z y x ,,),又设物体上各点得到一位移,并在同一坐标轴上的投影为(u 、v 、w ),这些位移分量可看作是坐标(z y x ,,)的函数。
于是物体上任点的最终位置由下述坐标值决定。
即⎪⎭⎪⎬⎫+=+=+=),,(),,(),,(z y x w z z y x v y z y x u x ζηξ上式中函数u 、v 、w 以及它们对坐标(z y x ,,)的偏导数假设是连续的,则式确定了变量(z y x ,,)与),,(ζηξ之间的关系。
因为物体中变形前各点对应看变形后的各点,因此式是单值的,所以式可看成是坐标的一个变换。
如果在中,假设00,y y x x ==,则由式可得如下三个方程⎪⎭⎪⎬⎫+=+=+=),,(),,(),,((00000000z y x w z z y x v y z y x u x ςηξ式决定了一条曲线,曲线上各点Λ,,21**M M ,在物体变形前为平行于z 轴的直线(00,y y x x ==)上(图。
我所认识的应力和应变之间的关系在单向应力状态下,理想弹性材料的应力和应变之间的关系是满足胡克定律的一一对应的关系。
在三维应力状态下描述一点处的应力状态需要9个分量,相应的应变状态也要用9个应变分量来表示。
对于一个具体的理想弹性体来讲,如果在三维应力状态下,应力与应变之间仍然有线性一一对应关系存在,则称这类弹性体为线性弹性体。
所谓各向弹性体,从力学意义上讲,就是弹性体内的每一点沿各个方向的力学性质都完全相同的。
这类线性弹性体独立的唐兴常数只有两个。
各向同性体本构关系特点:1.主应力与主应变方向重合。
2.体积应力与体积应变成比例。
3.应力强度与应变强度成比例。
4.应力偏量与应变偏量成比例。
工程应用中,常把各向同性弹性体的本构方程写下成11()11()11()x y z xy xy y x z yz yz z y x xz xz E G E G E G εσμσσγτεσμσσγτεσμσσγτ⎧⎡⎤=-+=⎣⎦⎪⎪⎪⎡⎤=-+=⎨⎣⎦⎪⎪⎡⎤=-+=⎪⎣⎦⎩,式中分别为弹性模量、泊松比和剪切模量。
在E G μ、、这三个参数之间,实际上独立的常量只有两个,它们之间存在关系为()21E G μ=+。
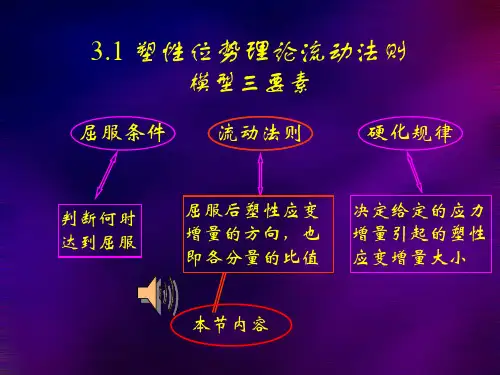
屈服条件:弹性和塑性的最主要区别在于变形是可以恢复。
习惯上,根据破坏时变形的大小把工程材料分为脆性材料和塑性材料两类。
对于加载过程如图1OA: 比例阶段;线性弹性阶段AB: 非弹性变形阶段 BC : 初始屈服阶段 s σσ≤ CDE :强化阶段;应变强化硬化阶段EF : 颈缩阶段;应变弱化,软化阶段s σσ≥ C 点为初始屈服点具有唯一性。
在应力超过屈服应力后,如果在曲线上任意一点D 处卸载,应力和应变之间将不再遵循原有的加载曲线规律,而是沿一条接近平行于OA 的直线DO ’变化,直到应力下降为零,这时应变并不为零,即有塑性应变产生。
如果用OD ’表示总应变ε,O ’D ’表示可以恢复的弹性应变eε,OO ’表示不能恢复的塑性应变p ε,则有e p εεε=+,即总应变等于弹性应变加上塑性应变。