第4章:连续体的振动
- 格式:ppt
- 大小:2.74 MB
- 文档页数:53
第四章连续体的振动拉格朗日(grange):1762年建立了离散系统振动的一般理论.对连续系统研究最早的是弦线的振动达朗贝尔(J.le R.d’Alembert)1746年用偏微分方程得到弦线振动的波动方程,并求出行波解伯努利(D.Bernoulli)1753年用无穷多个模态叠加的方法得到了弦线振动的驻波解1759年拉格朗日(grange):从驻波解推得行波解1811年傅里叶提出函数的阶数展开理论,给出严格的数学证明‘其它连续系统的振动问题也相继得到研究伯努利(D.Bernoulli)1744-1751年研究了梁的横向振动,导出了自由.简支和固定端的频率方程和振型函数奇拉尼(E.F.F.Chladni):1802年研究了杆的轴向和扭转振动.本章只讨论理想弹性体的振动理想弹塑性体满足以下假设条件①各向同性;②均质分布;③服从虎克定律§4.1 弦的振动T (,)q x t 讨论两端受到张力拉紧的弦,弦上还受到横向干扰力的作用(,)q x t yxdxxdm Adsρ=第四章连续体的振动设弦的密度为ρ(质量/单位体积)假设小变形,弦力不随挠度变化。
则弦上的任意一点的位移y 应为位置x 与时间t 的函数,即(,)y y x t =22()()dm Ads A dx dy Adxρρρ==+≈(,)(,)y x t x t tg xθθ∂=≈∂y [,]x x dx +沿方向作用在微小区间的外力之和为(,)[(,)](,)(,)(,)(,)x t T x t dx T x t q x t dxxx t T dx q x t dxxθθθθ∂+-+∂∂=+∂根据牛顿第二定律,弦的单元微段ds 沿y 方向的运动微分方程为:22(,)(,)(,)y x t x t Adx T dx q x t dx txθρ∂∂=+∂∂(,)(,)y x t x t xθ∂=∂代入得:2222(,)(,)(,)y x t y x t A T q x t t xρ∂∂=+∂∂22222(,)(,)1(,)y x t y x t c q x t t x Aρ∂∂=+∂∂Tc A ρ=设代入得:C 为波沿长度方向的传播速度(,)()()()sin()n y x t Y x H t Y x t ωϕ==+如无干扰力作用时,22222(,)(,)y x t y x t c t x∂∂=∂∂——称为波动方程弹性体系统作某阶主振动时,其各点也应当作同样的频率及相位运动,各点也应当同时通过静平衡位置和到达最大偏离位置,即系统具有一定的与时间无关的振型()Y x 为振型函数2222222(,)()sin()(,)()sin()nn n y x t Y x t t y x t d Y x t xdx ωωϕωϕ⎧∂=-+⎪⎪∂⎨∂⎪=+⎪∂⎩得2222()()sin()sin()n n n d Y x Y x t c t dx ωωϕωϕ-+=+()sincosnnY x A x B xc c ωω=+(,)(sin cos )sin()n nn y x t A x B x t c cωωωϕ=+⋅+2222()()0n d Y x Y x dxcω+=故,,,n A B ωϕ4个待定常数,可由弦的边界条件及振动的两个初始条件来确定。
第四章连续体的振动§4.2 杆的纵向振动例:有一根 x =0 端为自由、x =l 端处为固定的杆,固定端承受支撑运动 td t u g ωsin )(=d 为振动的幅值试求杆的稳态响应。
l x 0)(t u g §4.2 杆的纵向振动解: l x 0t d t u g ωsin )(=方程建立 dx u dx x u u u g ∂-∂+)(22xu Sdx ∂∂ρdx x F F ∂∂+F 微段分析应变: xu u dx u dx x u u u g g ∂-∂=-∂-∂+=)(])([ε内力: xu u ES ES F g ∂-∂==)(ε达朗贝尔原理: F dx F F u Sdx -∂+=∂)(2ρ),(t x u 杆上距原点 x 处截面在时刻 t 的纵向位移 22)(u u ES u S g -∂=∂ρl x 0td t u g ωsin )(=令: 代入方程: 2222)(x u u ES t u S g ∂-∂=∂∂ρg u u u -=*g u u u +=*即: **''g Su ESu Su ρρ-=-2sin Sd tρωω=-设解为: ∑∞==1*)()(i i i t q x u φ)(x i φ为归一化的正则模态 ,...5,3,1,2cos 2)(==i x li l x i πφ代入方程,得: tSd ESq q S i i i i i ωωρφφρsin )(2,...5,3,1''=-∑∞=l x0t d t u g ωsin )(=2222)(x u u ES t u S g ∂-∂=∂∂ρgu u u -=*∑∞==1*)()(i i i t q x u φ,...5,3,1,2cos 2)(==i x l i l x i πφtSd ESq q S i i i i i ωωρφφρsin )(2,...5,3,1''=-∑∞= )(x j φ用 乘上式,并沿杆长积分:⎰∑⎰⎰=-∞=lj i l j i i l j i idx t Sd dx ES q dx S q 0210''0sin )(φωωρφφφφρ 利用正交性: t d i l l q q i i i i ωωπωsin )1(2222/)1(2--=+l x 0td t u g ωsin )(=2222)(x u u ES t u S g ∂-∂=∂∂ρg u u u -=*∑∞==1*)()(i i i t q x u φ,...5,3,1,2cos 2)(==i x li l x i πφt d i l l q q i i i i ωωπωsin )1(2222/)1(2--=+ 模态稳态解: t d i l l q i i i i ωπηωωsin )1(222/)1(22--=2)/(11i i ωωη-=t lx i d i E l u i i i ωπηπωρsin 2cos )1(16,...5,3,132/)1(322*∑∞=--=l x 0td t u g ωsin )(=2222)(x u u ES t u S g ∂-∂=∂∂ρg u u u -=*2)/(11i i ωωη-=t lx i d i E l u i i i ωπηπωρsin 2cos )1(16,...5,3,132/)1(322*∑∞=--=t d l x i i E l u u u i i i gωπηπωρsin 2cos )1(161 ,...5,3,12/)1(3322*⎥⎦⎤⎢⎣⎡-+=+=∑∞=-小结1. 建立动力学方程2. 根据边界条件求解固有频率和模态3. 变量分离4. 代入动力学方程,并利用正交性条件得到模态空间方程5. 物理空间初始条件转到模态空间6. 模态空间方程求解7. 返回物理空间,得解)()(),(1t q x t x u i i i φ∞=∑=)(2t Q q q j j j j =+ω )(,x i i φω)0(),0(j j q q )(t q j )()(),(1t q x t x u i i i φ∞=∑=物理空间问题 模态空间问题 )()(),(1t q x t x u i i i φ∞=∑=模态叠加法§4.3圆轴的扭转振动取圆轴的轴心线作为x 轴,图示轴任一 x 截面处的转角表示为θ(x ,t ) 。
![飞行器结构动力学_第1章_2014版 [兼容模式]](https://uimg.taocdn.com/1a6d4b0ede80d4d8d15a4f4f.webp)


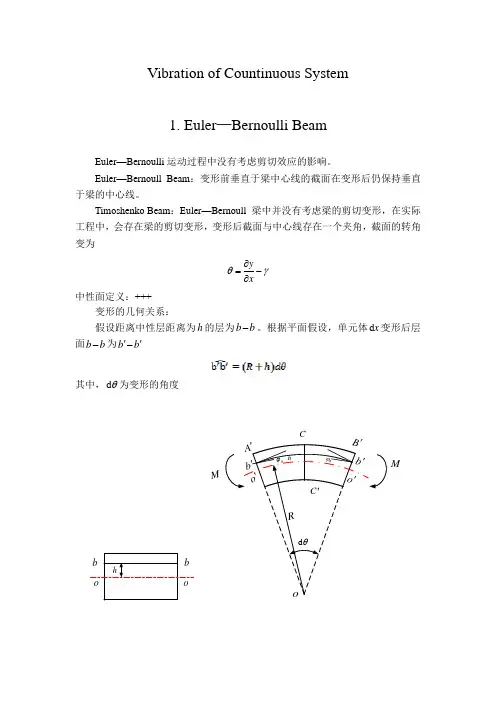
Vibration of Countinuous System1. Euler —Bernoulli BeamEuler —Bernoulli 运动过程中没有考虑剪切效应的影响。
Euler —Bernoull Beam :变形前垂直于梁中心线的截面在变形后仍保持垂直于梁的中心线。
Timoshenko Beam :Euler —Bernoull 梁中并没有考虑梁的剪切变形,在实际工程中,会存在梁的剪切变形,变形后截面与中心线存在一个夹角,截面的转角变为y xθγ∂=-∂中性面定义:+++变形的几何关系:假设距离中性层距离为h 的层为b b -。
根据平面假设,单元体d x 变形后层面b b -为b b ''-其中,d θ为变形的角度bbo ohCC 'd θoo 'o 'b 'b 'MMRhA 'B 'A ϕBϕMC应变的表达式为()d -d d R h R hR Rθθεθ+==弯矩的表达式为2d d d AAA E EIM h A h E A h A R Rσε====⎰⎰⎰其中,I 为截面的惯性矩。
转角的表达式,A 点的转角为A ϕ,B 点的转角为B ϕA y xϕ∂=∂对于B 点,假定转角对位置坐标线性变化,有22d d AB A x xy y x x x ϕϕϕ∂=+∂∂∂=+∂∂因此,弯曲的角度d θ表示为22d d B A yx xθϕϕ∂=-=∂由于梁弯曲变形为小变形,有如下d d R x θ=得到221y R x∂=∂得到弯矩的表达式2M EI x=∂1.1 Newton 2th law Equation.yx取长度为L 的梁中的微元体研究,单元体的长度为d x 。
假定受到与位置坐标x 相关的载荷()p x 的作用,考虑到变截面梁,假定截面面积为()A x 。
梁的密度表示为位置坐标x 的函数()x ρ。
单元体受力情况如图++所示。
声学与振动工程作业指导书第1章声学基础理论 (4)1.1 声波传播原理 (4)1.1.1 声波的产生 (4)1.1.2 声波的传播速度 (4)1.1.3 声波的传播方程 (4)1.2 声场方程与声能量 (4)1.2.1 声场方程 (4)1.2.2 声能量 (5)1.3 声波在介质中的传播特性 (5)1.3.1 吸声 (5)1.3.2 反射 (5)1.3.3 折射 (5)1.3.4 散射 (5)1.3.5 衰减 (5)第2章振动理论基础 (5)2.1 单自由度系统振动 (5)2.1.1 自由度与简谐振动 (5)2.1.2 振动方程与固有频率 (6)2.1.3 强迫振动与共振 (6)2.1.4 阻尼对振动的影响 (6)2.2 多自由度系统振动 (6)2.2.1 多自由度系统的一般描述 (6)2.2.2 固有振型与固有频率 (6)2.2.3 振动响应的叠加原理 (6)2.2.4 耦合振动与解耦 (6)2.3 连续体振动 (6)2.3.1 弦振动 (6)2.3.2 梁振动 (6)2.3.3 板振动 (7)2.3.4 波传播与反射 (7)第3章声学测量技术 (7)3.1 声级测量 (7)3.1.1 测量原理 (7)3.1.2 测量方法 (7)3.1.3 测量仪器及注意事项 (7)3.2 声压级测量 (7)3.2.1 测量原理 (7)3.2.2 测量方法 (7)3.2.3 测量仪器及注意事项 (8)3.3 声学参数测量 (8)3.3.1 声学参数定义 (8)3.3.3 测量仪器及注意事项 (8)第4章振动测量与分析 (8)4.1 振动传感器与测量 (8)4.1.1 振动传感器概述 (8)4.1.2 振动传感器的选择与安装 (8)4.1.3 振动测量方法 (9)4.2 振动信号处理与分析 (9)4.2.1 振动信号的预处理 (9)4.2.2 振动信号的时域分析 (9)4.2.3 振动信号的频域分析 (9)4.3 振动模态分析 (9)4.3.1 振动模态分析概述 (9)4.3.2 振动模态参数识别 (9)4.3.3 振动模态分析的应用 (9)4.3.4 振动模态测试与验证 (9)第5章声学材料与结构 (9)5.1 声学吸声材料 (9)5.1.1 概述 (9)5.1.2 吸声机理 (10)5.1.3 功能评价 (10)5.1.4 常见声学吸声材料 (10)5.1.5 应用实例 (10)5.2 声学隔声材料 (10)5.2.1 概述 (10)5.2.2 隔声机理 (10)5.2.3 功能评价 (10)5.2.4 常见声学隔声材料 (11)5.2.5 应用实例 (11)5.3 声学透声材料 (11)5.3.1 概述 (11)5.3.2 透声机理 (11)5.3.3 功能评价 (11)5.3.4 常见声学透声材料 (11)5.3.5 应用实例 (11)第6章振动控制技术 (12)6.1 阻尼减振技术 (12)6.1.1 阻尼材料 (12)6.1.2 阻尼结构 (12)6.1.3 阻尼减振技术的应用 (12)6.2 主动振动控制 (12)6.2.1 主动振动控制原理 (12)6.2.2 控制算法 (12)6.2.3 主动振动控制的应用 (12)6.3.1 振动隔离元件 (13)6.3.2 振动隔离设计原则 (13)6.3.3 振动隔离技术的应用 (13)第7章声学信号处理 (13)7.1 声信号时域分析 (13)7.1.1 信号采集与预处理 (13)7.1.2 时域特征参数 (13)7.1.3 时域分析实例 (13)7.2 声信号频域分析 (13)7.2.1 傅里叶变换 (13)7.2.2 频谱分析 (13)7.2.3 短时傅里叶变换 (14)7.3 声信号处理算法 (14)7.3.1 滤波器设计 (14)7.3.2 声信号增强 (14)7.3.3 声学事件检测与分类 (14)第8章声学模拟与仿真 (14)8.1 边界元法 (14)8.1.1 基本原理 (14)8.1.2 离散化方法 (14)8.1.3 边界元法的应用 (14)8.2 有限元法 (15)8.2.1 基本原理 (15)8.2.2 有限元离散化 (15)8.2.3 有限元法的应用 (15)8.3 波动方程法 (15)8.3.1 基本原理 (15)8.3.2 离散化方法 (15)8.3.3 波动方程法的应用 (15)第9章声学环境评估与控制 (16)9.1 噪声评价量 (16)9.1.1 基本噪声评价量 (16)9.1.2 复合噪声评价量 (16)9.1.3 噪声评价指标 (16)9.2 声环境预测与模拟 (16)9.2.1 声环境预测方法 (16)9.2.2 声环境模拟技术 (16)9.2.3 声环境预测与模拟软件 (16)9.3 噪声控制策略 (17)9.3.1 噪声源控制 (17)9.3.2 传播途径控制 (17)9.3.3 接收端控制 (17)9.3.4 综合噪声控制策略 (17)第10章声学与振动工程应用案例 (17)10.1 建筑声学设计 (17)10.2 交通噪声治理 (17)10.3 工业振动控制与噪声降低 (18)10.4 声学检测与监测技术在实际工程中的应用 (18)第1章声学基础理论1.1 声波传播原理声波是一种机械波,它通过介质(如空气、液体和固体)的振动传播。
【干货】基于ANSYS的悬臂梁模态分析1、连续系统的振动实际的振动系统都是连续体,它们具有连续分布的质量与弹性,因而又称连续系统或分布参数系统。
由于确定连续体上无数质点的位置需要无限多个坐标,因此连续体是具有无限多自由度的系统。
连续体的振动要用时间和空间坐标的函数来描述,其运动方程不再像有限多自由度系统那样是二阶常微分方程组,它是偏微分方程。
在物理本质上,连续体系统和多自由度系统没有什么差别,连续体振动的基本概念与分析方法与有限多自由度系统是完全类似的。
2、说明(1) 本章讨论的连续体都假定为线性弹性体,即在弹性范围内服从虎克定律。
(2) 材料均匀连续;各向同性。
(3) 振动满足微振动的前提。
3、梁的弯曲振动动力学方程考虑细长梁的横向弯曲振动梁参数:ρ单位体积梁的质量E弹性模量I截面对中性轴的惯性距S 梁横截面积外部力:m(x,t): 单位长度梁上分布的外力矩f(x,t): 单位长度梁上分布的外力假设:(1) 梁各截面的中心惯性轴在同一平面xoy内(2) 外载荷作用在该平面内(3) 梁在该平面作横向振动(微振)(4) 这时梁的主要变形是弯曲变形(5) 在低频振动时可以忽略剪切变形以及截面绕中性轴转动惯量的影响伯努利-欧拉梁(Bernoulli-Euler Beam)令:y(x,t):距原点x处的截面在t时刻的横向位移微段受力分析力平衡方程:4、悬臂梁的固有频率和模态函数5、两端固定杆的纵向模态分析问题描述:一悬臂梁截面为矩形,如图1所示,几何尺寸及材料特性如下,分析其前三阶固有频率及振型。
GUI操作如下:一、菜单建模分析过程第一步,清除内存准备分析1) 清除内存:选择菜单Utility Menu>File>Clear& Start New,单击OK按钮。
2) 更换工作文件名:选择菜单Utility Menu>File>ChangeJobname,输入vibration of cantilever,单击OK按钮。