连续系统振动(a)-杆的纵向振动
- 格式:ppt
- 大小:2.48 MB
- 文档页数:45

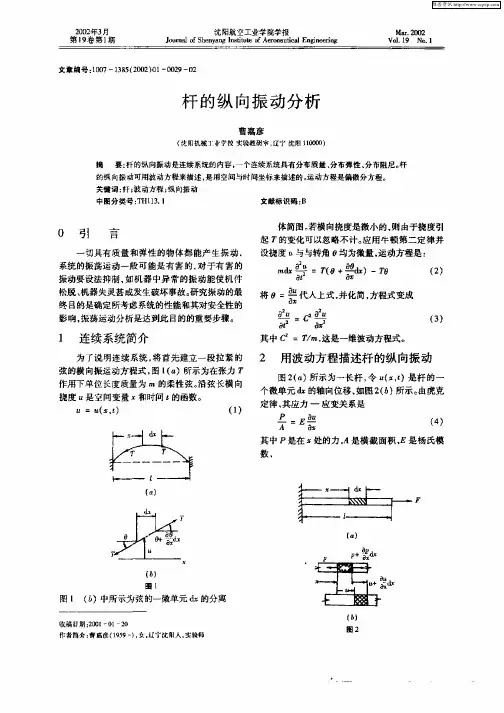
兰州理工大学李有堂编著机械系统动力学第7章连续系统的振动7.1 引言实际的物理系统都是由弹性体组成的系统,通常为连续系统。
离散系统是连续系统的近似模型,当其近似程度不能满足实际要求时,必须增加模型的自由度,或者采用连续模型。
连续模型是离散模型自由度无限增加时的极限。
连续系统是具有无限多个自由度的系统。
主要讨论可以获得精确解的问题。
弦的横向振动、杆的纵向振动和扭转振动、梁的弯曲振动7.2 弦的横向振动⏹弦:只能承受拉力,而抵抗弯曲及压缩的能力很弱。
⏹钢索、电线、电缆和皮带等柔性体构件⏹假设:材料是均匀连续和各向同性的;材料变形在弹性范围,服从虎克定律;运动是微幅的如图所示为一段长度为l 、两端固定的弦的横向振动的模型,f (x ,t )是作用在弦上的载荷密度,弦的线密度为ρ。
T ——弦上的张力,近似为常量;——时刻t 张力T 与x 轴的夹角 ——时刻t 弦上x 处的横向位移量(,)x t (,)y x t沿y 方向的运动微分方程为22(,)sin (,)sin (,)y x t T x dx t T x t dx t θθρ∂+-=∂对于微幅振动sin tan yxθθθ∂≈≈≈∂(,)(,)x dx t x t dxxθθθ∂+=+∂2222(,)(,)y x t y x t T x tρ∂∂=∂∂T αρ=22222(,)(,)y x t y x t x tα∂∂=∂∂弦的振动微分方程◆ 是一个偏微分方程◆ 对离散系统,运动是一种“同步运动”◆ 弹性体系统即连续系统也应为同步运动,同时达到极大值,同时过零点,因而整个弦的形状在振动中保持不变◆ 弦上各点随时间变化的位移可以分解为两部分的乘积22222(,)(,)y x t y x t x tα∂∂=∂∂(,)()()y x t Y x t Φ=分离变量确定整条弦线在空间的形状,与时间无关,弦的振型函数确定弦上各点位移随时间的变化规律,与空间坐标无关,弦的振动方式✓当 达到极值时,弦上各点位移同时达到极值 ✓当 为零时,弦上各点同时回到平衡位置()t Φ()t Φ(,)()()y x t Y x t Φ=x x Y t Φx t x y ∂∂=∂∂)()(),(2222)()(),(xx Y t Φx t x y ∂∂=∂∂t t Φx Y t t x y ∂∂=∂∂)()(),(2222)()(),(tt Φx Y t t x y ∂∂=∂∂方程左边仅为空间坐标的函数,右边仅为时间的函数,左右两边要保持相等,只有一种可能,就是两边均等于一个常数22222()1()()()Y x t Y x x t tαΦΦ∂∂=∂∂22222(,)(,)y x t y x t x tα∂∂=∂∂222222)()(1)()(n tt Φt Φx x Y x Y ωα-=∂∂=∂∂222()()0n t t tΦωΦ∂+=∂2222()()0n Y x Y x x ωα∂+=∂()sin()n t C t Φωϕ=+()sin cos n nY x A x B xωωαα=+弦的主振型是谐波曲线 (,)()()y x t Y x t Φ=()sin()n t C t Φωϕ=+()sin cos n nY x A x B xωωαα=+12(,)(sin cos )sin()n n n y x t C x C x t ωωωϕαα=++弦的运动规律是正弦曲线C 1、C 2、ωn 、为待定系数 ωn 、C 2——两个端点的边界条件确定、C 1——振动的初始条件确定 )sin(cos sin ),(ϕωαωαω+⎪⎭⎫ ⎝⎛+=t x B x A C t x y n n n ϕϕ弦的两端固定,其边界条件为(0,)(,)0y t y l t ==弦的两端固定,其边界条件为12(,)(sin cos )sin()n nn y x t C x C x t ωωωϕαα=++210, sin 0n lC C ωα==sin 0n l ωα=n lk ωπα=弦振动的特征方程,即频率方程nk k k Tl lαππωρ==第k 阶固有频率✓连续系统固有频率的取值和离散系统固有频率的取值一样,只取某几个特定的数值。
第四章连续体的振动§4.2 杆的纵向振动例:有一根 x =0 端为自由、x =l 端处为固定的杆,固定端承受支撑运动 td t u g ωsin )(=d 为振动的幅值试求杆的稳态响应。
l x 0)(t u g §4.2 杆的纵向振动解: l x 0t d t u g ωsin )(=方程建立 dx u dx x u u u g ∂-∂+)(22xu Sdx ∂∂ρdx x F F ∂∂+F 微段分析应变: xu u dx u dx x u u u g g ∂-∂=-∂-∂+=)(])([ε内力: xu u ES ES F g ∂-∂==)(ε达朗贝尔原理: F dx F F u Sdx -∂+=∂)(2ρ),(t x u 杆上距原点 x 处截面在时刻 t 的纵向位移 22)(u u ES u S g -∂=∂ρl x 0td t u g ωsin )(=令: 代入方程: 2222)(x u u ES t u S g ∂-∂=∂∂ρg u u u -=*g u u u +=*即: **''g Su ESu Su ρρ-=-2sin Sd tρωω=-设解为: ∑∞==1*)()(i i i t q x u φ)(x i φ为归一化的正则模态 ,...5,3,1,2cos 2)(==i x li l x i πφ代入方程,得: tSd ESq q S i i i i i ωωρφφρsin )(2,...5,3,1''=-∑∞=l x0t d t u g ωsin )(=2222)(x u u ES t u S g ∂-∂=∂∂ρgu u u -=*∑∞==1*)()(i i i t q x u φ,...5,3,1,2cos 2)(==i x l i l x i πφtSd ESq q S i i i i i ωωρφφρsin )(2,...5,3,1''=-∑∞= )(x j φ用 乘上式,并沿杆长积分:⎰∑⎰⎰=-∞=lj i l j i i l j i idx t Sd dx ES q dx S q 0210''0sin )(φωωρφφφφρ 利用正交性: t d i l l q q i i i i ωωπωsin )1(2222/)1(2--=+l x 0td t u g ωsin )(=2222)(x u u ES t u S g ∂-∂=∂∂ρg u u u -=*∑∞==1*)()(i i i t q x u φ,...5,3,1,2cos 2)(==i x li l x i πφt d i l l q q i i i i ωωπωsin )1(2222/)1(2--=+ 模态稳态解: t d i l l q i i i i ωπηωωsin )1(222/)1(22--=2)/(11i i ωωη-=t lx i d i E l u i i i ωπηπωρsin 2cos )1(16,...5,3,132/)1(322*∑∞=--=l x 0td t u g ωsin )(=2222)(x u u ES t u S g ∂-∂=∂∂ρg u u u -=*2)/(11i i ωωη-=t lx i d i E l u i i i ωπηπωρsin 2cos )1(16,...5,3,132/)1(322*∑∞=--=t d l x i i E l u u u i i i gωπηπωρsin 2cos )1(161 ,...5,3,12/)1(3322*⎥⎦⎤⎢⎣⎡-+=+=∑∞=-小结1. 建立动力学方程2. 根据边界条件求解固有频率和模态3. 变量分离4. 代入动力学方程,并利用正交性条件得到模态空间方程5. 物理空间初始条件转到模态空间6. 模态空间方程求解7. 返回物理空间,得解)()(),(1t q x t x u i i i φ∞=∑=)(2t Q q q j j j j =+ω )(,x i i φω)0(),0(j j q q )(t q j )()(),(1t q x t x u i i i φ∞=∑=物理空间问题 模态空间问题 )()(),(1t q x t x u i i i φ∞=∑=模态叠加法§4.3圆轴的扭转振动取圆轴的轴心线作为x 轴,图示轴任一 x 截面处的转角表示为θ(x ,t ) 。