控制系统的根轨迹法
- 格式:ppt
- 大小:1.04 MB
- 文档页数:7

控制系统校正的根轨迹方法用根轨迹法进行校正的基础,是通过在系统开环传递函数中增加零点和极点以改变根轨迹的形状,从而使系统根轨迹在S 平面上通过希望的闭环极点。
根轨迹法校正的特征是基于闭环系统具有一对主导闭环极点,当然,零点和附加的极点会影响响应特性。
应用根轨迹进行校正,实质上是通过采用校正装置改变根轨迹的,从而将一对主导闭环极点配置到期望的位置上。
在开环传递函数中增加极点,可以使根轨迹向右方移动,从而降低系统的相对稳定性,增大系统调节时间。
等同于积分控制,相当于给系统增加了位于原点的极点,因此降低了系统的稳定性。
在开环传递函数中增加零点,可以使根轨迹向左方移动,从而提高系统的相对稳定性,减小系统调节时间。
等同于微分控制,相当于给系统前向通道中增加了零点,因此增加了系统的超调量,并且加快了瞬态响应。
根轨迹超前校正计算步骤如下。
(1)作原系统根轨迹图;(2)根据动态性能指标,确定主导极点i s 在S 平面上的正确位置; 如果主导极点位于原系统根轨迹的左边,可确定采用微分校正,使原系统根轨迹左移,过主导极点。
(3)在新的主导极点上,由幅角条件计算所需补偿的相角差φ; 计算公式为:is s=︒±=(s)][G arg -180o ϕ (1)此相角差φ表明原根轨迹不过主导极点。
为了使得根轨迹能够通过该点,必须校正装置,使补偿后的系统满足幅角条件。
(4)根据相角差φ,确定微分校正装置的零极点位置; 微分校正装置的传递函数为:11++=sTp sTz KcGc (2)例题:已知系统开环传递函数: 试设计超前校正环节,使其校正后系统的静态速度误差系数Kv ≤4.6,闭环主导极点满足阻尼比ζ=0.2,自然振荡角频率ωn=12.0rad/s ,并绘制校正前后系统的单位阶跃响应曲线、单位脉冲响应曲线和根轨迹。
解: 由6.4)(*)(0*lim 0==→s Gc s G s Kv s 得kc=2计算串联超前校正环节的matlab 程序如下: 主函数: close; num=2.3;den=conv([1,0],conv([0.2,1],[0.15,1])); G=tf(num,den) %校正前系统开环传函 zata=0.2;wn=12.0; %要求参数 [num,den]=ord2(wn,zata); %追加系统动态特性 s=roots(den); s1=s(1);kc=2; %增益kc Gc=cqjz_root(G,s1,kc)GGc=G*Gc*kc %校正后系统开环传函 Gy_close=feedback(G,1) %校正前系统闭环传函 Gx_close=feedback(GGc,1) %校正后系统闭环传函 figure(1);step(Gx_close,'b',3.5); %校正后单位阶跃响应 hold onstep(Gy_close,'r',3.5); %校正前单位阶跃响应 grid;gtext('校正前的'); gtext('校正后的'); figure(2);0 2.3s(1+0.2s)(1+0.15s)G =impulse(Gx_close,'b',3.5); %校正后单位冲激响应 hold onimpulse(Gy_close,'r',3.5); %校正前单位冲激响应 grid;gtext('校正前的'); gtext('校正后的'); figure(3);rlocus(G,GGc); %根轨迹图 grid;gtext('校正前的'); gtext('校正后的');为使校正后系统的根轨迹能经过期望闭环主导极点,其闭环特征方程跟必须满足幅值和相角条件,即πθj j e e M Tp s Tz s Kcs G S Gc 111)(0)(0011=++=-,式中,M 0是校正前系统在1s 处的幅值,θ0是对应的相角。
第4章 根 轨 迹 法根轨迹法是分析和设计线性控制系统的图解方法,使用简便,在控制工程上得到了广泛应用。
本章首先介绍根轨迹的基本概念,然后重点介绍根轨迹绘制的基本法则,在此基础上,进一步讨论广义根轨迹的问题,最后介绍控制系统的根轨迹分析方法。
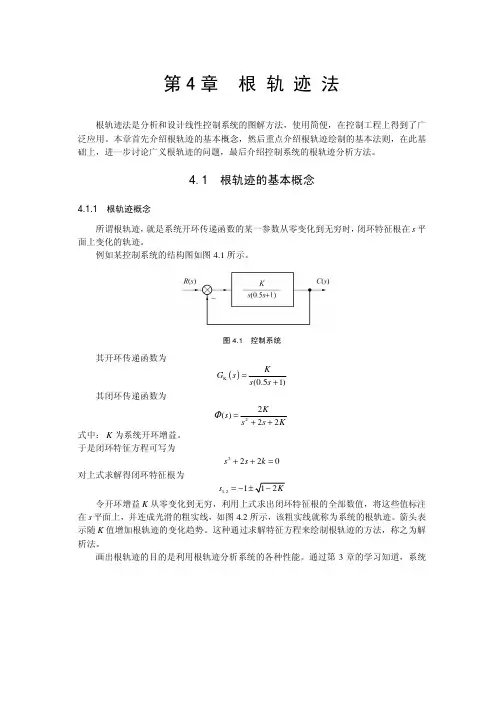
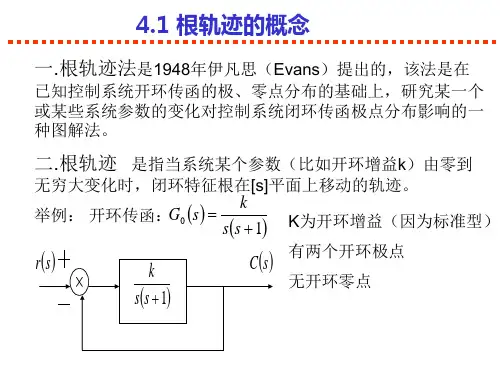
4.1 根轨迹的基本概念4.1.1 根轨迹概念所谓根轨迹,就是系统开环传递函数的某一参数从零变化到无穷时,闭环特征根在s 平面上变化的轨迹。
例如某控制系统的结构图如图4.1所示。
图4.1 控制系统其开环传递函数为()K (0.51)KG s s s =+其闭环传递函数为22()22Ks s s KΦ=++式中:K 为系统开环增益。
于是闭环特征方程可写为2220s s k ++=对上式求解得闭环特征根为1,21s =−令开环增益K 从零变化到无穷,利用上式求出闭环特征根的全部数值,将这些值标注在s 平面上,并连成光滑的粗实线,如图4.2所示,该粗实线就称为系统的根轨迹。
箭头表示随K 值增加根轨迹的变化趋势。
这种通过求解特征方程来绘制根轨迹的方法,称之为解析法。
画出根轨迹的目的是利用根轨迹分析系统的各种性能。
通过第3章的学习知道,系统第4章 根轨迹法·101··101·特征根的分布与系统的稳定性、暂态性能密切相关,而根轨迹正是直观反应了特征根在复平面的位置以及变化情况,所以利用根轨迹很容易了解系统的稳定性和暂态性能。
又因为根轨迹上的任何一点都有与之对应的开环增益值,而开环增益与稳态误差成反比,因而通过根轨迹也可以确定出系统的稳态精度。
可以看出,根轨迹与系统性能之间有着比较密切的联系。
图4.2 控制系统根轨迹4.1.2 根轨迹方程对于高阶系统,求解特征方程是很困难的,因此采用解析法绘制根轨迹只适用于较简单的低阶系统。
而高阶系统根轨迹的绘制是根据已知的开环零、极点位置,采用图解的方法来实现的。
下面给出图解法绘制根轨迹的根轨迹方程。

自动控制原理根轨迹法自动控制原理是现代工程技术中的重要分支,它涉及到机械、电子、计算机等多个领域。
而根轨迹法则是自动控制原理中的一种重要方法,它可以用来分析和设计控制系统,提高系统的稳定性和性能。
本文将从根轨迹法的基本原理、应用场景和优缺点三个方面进行介绍。
一、基本原理根轨迹法是一种基于极点和零点的控制系统分析方法。
在根轨迹图中,系统的极点和零点被表示为一条曲线,称为根轨迹。
根轨迹图可以用来分析系统的稳定性、响应速度和稳态误差等性能指标。
根轨迹法的基本原理是通过改变系统的参数,使得根轨迹图在复平面上移动,从而实现对系统性能的优化。
二、应用场景根轨迹法可以应用于各种控制系统的设计和分析中。
例如,在电机控制系统中,根轨迹法可以用来分析电机的转速响应和负载扰动对系统的影响。
在飞行控制系统中,根轨迹法可以用来设计飞机的自动驾驶系统,提高飞机的稳定性和飞行性能。
在机器人控制系统中,根轨迹法可以用来设计机器人的运动控制系统,实现机器人的精确控制和运动规划。
三、优缺点根轨迹法的优点是可以直观地表示系统的稳定性和性能指标,便于工程师进行控制系统的设计和分析。
此外,根轨迹法还可以用来分析系统的鲁棒性和鲁棒稳定性,提高系统的抗干扰能力和鲁棒性。
但是,根轨迹法也存在一些缺点,例如对于高阶系统,根轨迹法的计算复杂度较高,需要使用计算机进行计算。
此外,根轨迹法也无法处理非线性系统和时变系统,需要使用其他方法进行分析和设计。
总之,根轨迹法是自动控制原理中的一种重要方法,可以用来分析和设计各种控制系统。
在实际工程中,工程师需要根据具体的应用场景和系统要求,选择合适的控制方法和算法,实现对系统的优化和控制。
自动控制原理根轨迹法知识点总结自动控制原理中的根轨迹法是一种常用的分析和设计控制系统的方法。
它通过在复平面上绘制系统的根轨迹,并结合数学分析的方法,可以帮助我们了解系统的稳定性及动态特性,并设计出合适的控制器来实现所需的性能要求。
本文将对根轨迹法的原理和关键知识点进行总结。
一、根轨迹法的基本原理根轨迹法是通过分析系统的开环传递函数来确定系统的极点和零点在复平面上的分布情况。
根轨迹是由系统的特征方程的解所决定的,即特征方程的根随参数的变化而移动,形成了一条曲线,这条曲线即为根轨迹。
根轨迹的形状和分布反映了系统的稳定性、动态响应及频率特性。
根轨迹法的基本步骤如下:1. 给定系统的开环传递函数:G(s)H(s),其中G(s)为系统的传递函数,H(s)为控制器的传递函数。
2. 将开环传递函数表示为极点-零点的形式:G(s)H(s) = K·(s-z1)(s-z2)...(s-zn) / (s-p1)(s-p2)...(s-pm),其中K为传递函数的增益,zi和pi为传递函数的零点和极点。
3. 根据传递函数的特征方程:1+G(s)H(s)=0,得到特征方程:1+K·(s-z1)(s-z2)...(s-zn) / (s-p1)(s-p2)...(s-pm) = 0。
4. 以复平面为基准,根据特征方程的根(极点和零点),画出根轨迹。
5. 根据根轨迹的形状和分布,分析系统的稳定性和动态响应,设计合适的控制器参数。
二、根轨迹法的关键知识点1. 极点和零点:极点和零点是传递函数的根,它们对系统的稳定性和动态响应有着重要影响。
极点是使得特征方程为零的点,零点是使得传递函数的分子为零的点。
2. 稳定性判据:系统的稳定性和根轨迹的位置有直接关系。
当系统的极点全部位于左半平面时,系统是稳定的;若存在极点位于右半平面,则系统是不稳定的。
3. 根轨迹与动态响应:根轨迹的形状和分布反映了系统的动态响应。
根轨迹与阻尼比、自然频率等参数有关,可以通过观察根轨迹的形状来判断系统的超调量、振荡频率等动态性能指标。
控制系统根轨迹法控制系统的设计和分析是现代工程领域中的重要任务。
为了实现系统的稳定性和性能要求,控制系统工程师采用了多种方法和技术。
其中,根轨迹法是一种常用且有效的方法,用于评估和改进系统的动态响应。
1. 系统根轨迹方法概述控制系统根轨迹方法是基于系统的传递函数,通过分析系统在复平面上的极点和零点位置来评估系统的稳定性和动态性能。
在根轨迹图中,系统的极点和零点以及传递函数的增益可以直观地展示出来,从而帮助工程师定量地了解系统的响应特性。
2. 根轨迹图的构造根轨迹图通常由两个主要的部分组成:实部为-1的轴线和虚部为0的轴线。
系统的传递函数通常表示为连续时间的形式,并且可以表示为一个或多个一阶和二阶传递函数的乘积。
根轨迹图的构造基于这些传递函数的极点和零点。
极点和零点对应于根轨迹图上的曲线,其中极点表示系统的稳定性,而零点则表示系统的过渡性能。
3. 根轨迹与稳定性根轨迹图提供了系统稳定性的重要信息。
通过观察根轨迹图,可以确定系统的稳定性。
如果根轨迹图上的所有的极点都位于左半平面,那么系统是稳定的。
相反,如果存在极点位于右半平面,系统是不稳定的。
通过调整参数或者设计控制器,可以将系统的极点移动到左半平面,从而提高系统的稳定性。
4. 根轨迹与动态响应除了稳定性,根轨迹图还提供了关于系统动态响应的信息。
通过观察根轨迹图上的曲线形状,可以了解系统的过渡特性。
例如,当根轨迹密集且靠近虚部为0的轴线时,说明系统的过渡响应非常快。
相反,当根轨迹离散且远离虚部为0的轴线时,说明系统的过渡响应比较慢。
通过分析根轨迹图,工程师可以调整系统参数来改善系统的动态响应性能。
5. 根轨迹的应用根轨迹方法是控制系统分析和设计中常用的工具之一。
它可以用于多个方面,包括控制器的设计、系统的稳定性分析和性能优化。
使用根轨迹方法,工程师可以确定合适的控制器增益、相位补偿器和频率补偿器来满足系统的设计要求。
6. 根轨迹法的局限性尽管根轨迹法在控制系统领域中被广泛应用,但它也有一些局限性。