蜗杆传动基本几何尺寸计算
- 格式:xls
- 大小:116.50 KB
- 文档页数:6
普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
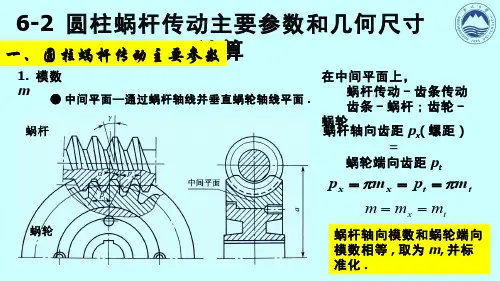
z1和z2的推荐值见下表(4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
蜗轮蜗杆的计算公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q ,即: q=d1/m常用的标准模数m 和蜗杆分度圆直径d1及直径系数q ,见匹配表。
(3)蜗杆头数z 1和蜗轮齿数z 2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。

计算项目中心距模数轴截面齿形角传动比变位系数径向间隙头数Z1特性系数q 齿顶高h di 齿根高hg 分度圆直径D fe1节圆直径D je1齿顶圆直径D di1齿根圆直径D g1分度圆螺旋导角λ法向模数m f 轴截面齿距P螺旋导程P Z 螺牙沿分度圆柱上的轴向齿厚S z1螺牙沿分度圆柱上的法向齿厚S f1齿厚测量高度h~齿数Z 2分度圆直径D fe2节圆直径D je2齿根圆直径D g2齿顶圆直径D di2最大外圆直径Dw 2轮缘宽度b 齿顶圆弧半径R 1代 号A M du α螺旋长度L☆蜗 轮圆柱蜗杆传动基本几i ξc蜗杆齿根圆弧半径R 2轮基本几何尺寸计算公式公 式计算结果备注A=0.5M du(Z2+q+2ξ)175.00Mdu=2A/(Z2+q+2ξ) 3.15α=20°20.00i=Z2/Z1=n1/n297.00ξ=(A/Mdu)-0.5(q+z2) 2.06C=0.25Mdu0.79Z1=1,2,4 1.00q=Dfe1/Mdu10.00hdi=Mdu 3.15hg=1.25Mdu 3.94Dfe1=qMdu31.50Dje1=Dfe1+2Mduξ=Mdu(q+2ξ)44.45Ddi1=Mdu(q+2)37.80Dg1=Mdu(q-2.5)23.63λ=arctgZ1/q0.10mf=Mducosλ 3.13L=(12+0.1z2)Mdu68.36Z1=1,2 L=(13+0.1z2)Mdu71.51Z1=4 P=πMdu9.90PZ=πMduZ19.90Sz1=0.45πMdu97.00Sf1=Sz1cosλ96.52h~=Mdu 3.15Z2=iZ197.00Dfe2=MduZ2305.55Dje2=Dfe2=MduZ2305.55Dg2=2(A-0.5Ddi1-0.25Mdu)310.63Ddi2=2(A-0.5Dfe1+Mdu)324.80Dw2=Ddi2+Mdu327.95b=0.65Ddi124.57R1=0.5Dfe1-Mdu12.60R1=0.5Ddi1+0.25Mdu19.69。
蜗轮、蜗杆的计算公式: 1,传动比=蜗轮齿数÷蜗杆头数 2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数 5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m 就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表。
4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷23,蜗轮吼径=(齿数+2)×模数4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tgβ=(模数×头数)÷蜗杆节径一.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
圆柱蜗杆传动主要参数及几何计算设计圆柱蜗杆传动时,均取给定平面上的参数和几何尺寸作为主要参数,参考齿轮传动的计算关系进行几何计算。
1. 蜗杆传动主要参数∙普通圆柱蜗杆的基准齿廓普通圆柱蜗杆的基准齿廓是指基准蜗杆在给定截面上的规定齿廓。
在蜗杆的轴平面内基准齿廓的尺寸参数包括:∙齿顶高:Ha = m(正常齿)ha = 0.8m(短齿)∙工作齿高:h’ = 2m(正常齿)h’ = 1.6m(短齿)∙轴向齿距:Px = πm (中线上的齿厚等于齿槽宽)∙顶隙:c = 0.2m,必要时可减小到0.15m或增大到0.35m∙齿根圆角:ρf = 0.3m, 必要时可减小到0.2m或增大到0.4m∙齿形角:阿基米德蜗杆,轴向齿形角αx = 20°,法向直廓蜗杆,法向齿形角αn = 20°,渐开线蜗杆,法向齿形角αn = 20°∙模数、蜗杆分度圆直径和直径特性系数1)模数m 在中间平面上的模数为标准值,即蜗杆的轴向模数mx和蜗轮的端面模数mt为标准值。
2) 蜗杆分度圆直径d1要保证蜗杆与蜗轮的正确啮合,蜗轮加工是用和与该蜗轮相啮合的蜗杆的直径、齿形参数完全相同的滚刀进行切制。
为了减少加工蜗轮的滚刀的规格数量,利于蜗轮滚刀的标准化和系列化,国标规定d1为标准值,且与m有一定的搭配关系。
3) 蜗杆直径特性系数q由于蜗杆分度圆直径d1和蜗杆模数m均为标准值,定义它们的比值为蜗杆直径特性系数,即d1 = mq。
∙蜗杆头数Z1和蜗轮齿数Z2蜗杆头数Z1是指蜗杆圆柱面上连续齿的个数,也就是螺旋线的线数。
常用取值为1,2,4,6。
Z1过多,加工制造的难度增加,精度不易保证;Z1减小,传动效率降低,传动比较大或要求自锁时取Z1=1。
蜗轮齿数Z2根据传动比i和Z1确定。
Z2 = i Z1。
为避免蜗轮轮齿发生根切和保证传动的平稳性,一般取蜗轮齿数Z2>27;同时为避免结构尺寸一定时,模数过小而导致弯曲强度不足或模数一定时,蜗轮直径过大而导致蜗杆轴支撑跨距过大从而刚度降低,蜗轮齿数也不宜过大,一般取Z2<80。
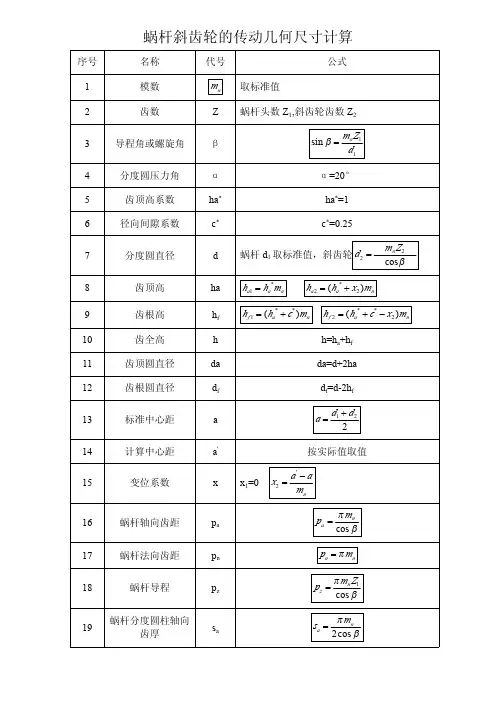
轴交角Σ=90°的圆柱蜗杆传动的基本几何尺寸如图示,其值可按表B1的关系式确定。
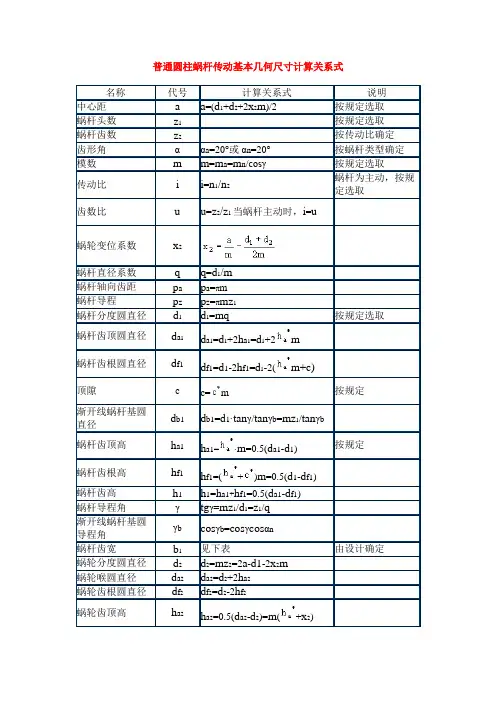
序号名称代号关系式说明1 中心距 a a=(d1+d2+2x2m)/2 按规定选取2 蜗杆头数z1按规定选取3 蜗轮齿数z2按传动比确定4 齿形角ααx=20°或αn=20°按蜗杆类型确定5 模数m 按规定选取6 传动比i i=n1/n2蜗杆为主动,按规定选取7 齿数比u u=z2/z1当蜗杆主动时,i=u8 蜗轮变位系数x29 蜗杆直径系数q q=q1/m10 蜗杆轴向齿距p x p x=πm11 蜗杆导程p z p z=πmz112 蜗杆分度圆直径d1d1=mq 按规定选取13 蜗杆齿顶圆直径d a1d a1=d1+2h a1=d1+2h*a m14 蜗杆齿根圆直径d f1d f1=d1-2h f1=d1-2(h*a m+c)15 顶隙 c c=c*m 按规定16 渐开线蜗杆基圆直径d b1d b1=d1·tgγ/tgγb=mz1/tgγb17 蜗杆齿顶高h a1按规定18 蜗杆齿根高h f119 蜗杆齿高h120 蜗杆导程角γtgγ=mz1/d1=z1/q21 渐开线蜗杆基圆导程角γb cosγb=cosγcosαn22 蜗杆齿宽b1由设计确定23 蜗轮分度圆直径d2d2=mz2=2a-d1-2x2m24 蜗轮喉圆直径d a2d a2=d2+2h a225 蜗轮齿根圆直径d f2d f2=d2-2h f226 蜗轮齿顶高h a227 蜗轮齿根高h f228 蜗轮齿高h229 蜗轮咽喉母圆半径r g230 蜗轮齿宽b2凡设计确定31 蜗轮齿宽角θ32 蜗杆轴向齿厚s x33 蜗杆法向齿厚s n s n=s x cosγ34 蜗轮齿厚s t按蜗杆节圆处轴向齿槽宽e x′确定35 蜗杆节圆直径d1′d1′=d1+2x2m=m(q+2x2)36 蜗轮节圆直径d2′d2′=d2:。
蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷ 2 3,蜗轮吼径=(齿数+2)×模数4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数6,蜗杆导程=π×模数×头数为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动i=n1/n2=z2/z1 =u式中:n1 -蜗杆转速;n2-蜗轮转速。
减速运动的动力蜗杆传动,通常取5≤u≤70,优先采用15≤u≤50;增速传动5≤u≤15。
普通圆柱蜗杆基本尺寸和参数及其与蜗轮参数的匹配表。
2 蜗杆传动变位的特点蜗杆传动变位变位蜗杆传动根据使用场合的不同,可在下述两种变位方式中选取一种。
1)变位前后,蜗轮的齿数不变(z2 '=z2),蜗杆传动的中心距改变(a '≠a),如图9-8a、c所示,其中心距的计算式如下:a '=a+x2m=(d1+d2+2x2m)/22)变位前后,蜗杆传动的中心距不变(a '=a),蜗轮齿数发生变化(z2'≠z2),如图9-8d、e所示,z2' 计算如下:因a'=a则z2' =z2-2x2蜗杆传动变位:3 普通圆柱蜗杆传动的几何尺寸计算普通圆柱蜗杆传动基本几何尺寸计算关系式:。
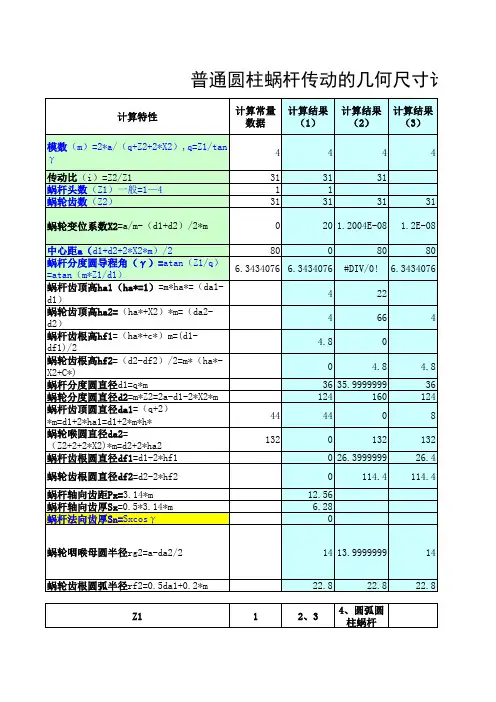
圆柱蜗杆传动基本几何尺寸关系式序号名称代号关系式1中心距a a=(d1+d2+2X2m)/22蜗杆头数Z13蜗轮齿数Z24齿形角αα=20°5模数m6传动比i i=n1/n27齿数比u u=Z2/Z1,蜗杆主动时,i=u8蜗轮变位系数X2X2=a/m-(d1+d2/2m)9蜗杆直径系数q q=d1/m10蜗杆轴向齿距px px=Πm11蜗杆导程px px=ΠmZ112蜗杆分度圆直径d1d1=mq13蜗杆齿顶圆直径da1da1=d1+2ha1=d1+2ha*m14蜗杆齿根圆直径df1df1=d1-2hf1=d1-2(ha*m+c) 15顶隙c c=c*m16渐开线蜗杆基圆直径d b1db1=d1.tgγ/tgγb=m.z1/tgγb 17蜗杆齿顶高ha1ha1=ha* m=1/2(da1-d1)18蜗杆齿根高hf1hf1=(ha*+c*).m=1/2(d1-df1) 19蜗杆齿高h1h1=ha1+hf1=1/2(da1-df1)20蜗杆导程角γtgγ=mz1/d1=z1/q21渐开线蜗杆基圆导程角γb cosγb=cosγ.cosa n22蜗杆齿宽b123蜗轮分度圆直径d2d2=m.Z2=2a-d1-2X2.m24蜗轮喉圆直径da2da2=d2+2ha225蜗轮齿根圆直径df2df2=d2-2hf226蜗轮齿顶高ha2ha2=1/2(da2-d2)=m(ha*+X2) 27蜗轮齿根高hf2hf2=1/2(d2-df2)=m(ha*-X2+c*) 28蜗轮齿高h2h2=ha2+hf2=1/2(da2-df2)29蜗轮咽喉母圆半径ra2ra2=a-1/2.da230蜗轮齿宽b231蜗轮齿宽角θθ=2arcsin(b2/d1)32蜗杆轴向齿厚s x sx=1/2Πm33蜗杆法向齿厚s n sn=sx.cosγ34蜗轮齿厚st按蜗杆节圆处轴向齿槽宽ex'确35蜗杆节圆直径d1'd1'=d1+2.x2.m=m(q+2.x2)36蜗轮节圆直径d2'd2'=d2示例说明按规定选取125按规定选取1按传动比确定62按蜗杆类型确定20°按规定选取 3.15蜗杆为主,按规定选取626216.825396839.8919.891按规定选取53ha*齿顶高系数,一般为159.345.125c*顶隙系数,按规定,一般为0.78750.2,ZC蜗杆一般为0.16按规定 3.153.93757.08750.059364129 3.397326938按设计确定64197203.3189.443.153.786.9323.35按设计确定4.9455-4.7846615353197。