棘轮机构的几何尺寸计算公式(优.选)
- 格式:doc
- 大小:48.50 KB
- 文档页数:2
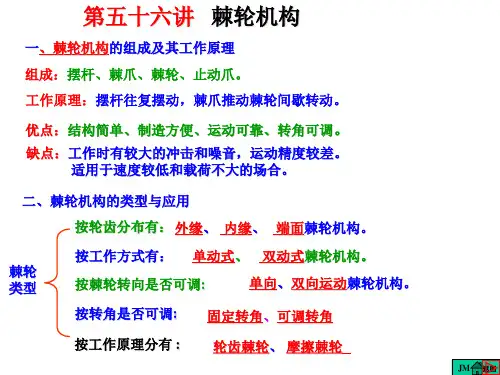
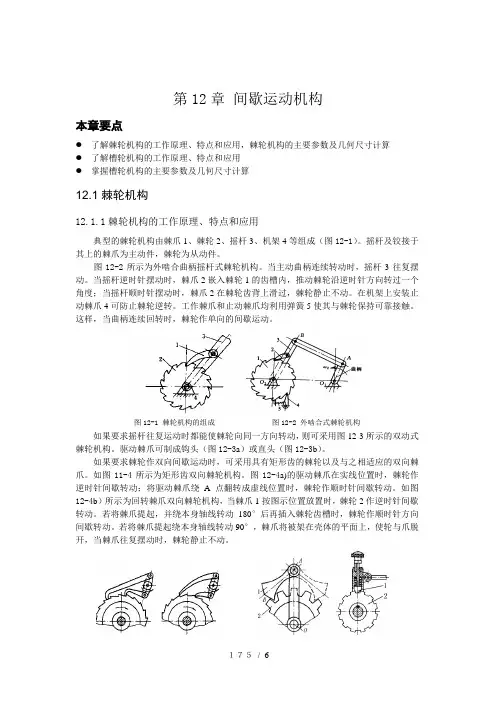
第12章间歇运动机构本章要点●了解棘轮机构的工作原理、特点和应用,棘轮机构的主要参数及几何尺寸计算●了解槽轮机构的工作原理、特点和应用●掌握槽轮机构的主要参数及几何尺寸计算12.1棘轮机构12.1.1棘轮机构的工作原理、特点和应用典型的棘轮机构由棘爪1、棘轮2、摇杆3、机架4等组成(图12-1)。
摇杆及铰接于其上的棘爪为主动件,棘轮为从动件。
图12-2所示为外啮合曲柄摇杆式棘轮机构。
当主动曲柄连续转动时,摇杆3往复摆动。
当摇杆逆时针摆动时,棘爪2嵌入棘轮1的齿槽内,推动棘轮沿逆时针方向转过一个角度;当摇杆顺时针摆动时,棘爪2在棘轮齿背上滑过,棘轮静止不动。
在机架上安装止动棘爪4可防止棘轮逆转。
工作棘爪和止动棘爪均利用弹簧5使其与棘轮保持可靠接触。
这样,当曲柄连续回转时,棘轮作单向的间歇运动。
图12-1 棘轮机构的组成图12-2 外啮合式棘轮机构如果要求摇杆往复运动时都能使棘轮向同一方向转动,则可采用图12-3所示的双动式棘轮机构。
驱动棘爪可制成钩头(图12-3a)或直头(图12-3b)。
如果要求棘轮作双向间歇运动时,可采用具有矩形齿的棘轮以及与之相适应的双向棘爪。
如图11-4所示为矩形齿双向棘轮机构。
图12-4a)的驱动棘爪在实线位置时,棘轮作逆时针间歇转动;将驱动棘爪绕A点翻转成虚线位置时,棘轮作顺时针间歇转动。
如图12-4b)所示为回转棘爪双向棘轮机构,当棘爪1按图示位置放置时,棘轮2作逆时针间歇转动。
若将棘爪提起,并绕本身轴线转动180°后再插入棘轮齿槽时,棘轮作顺时针方向间歇转动。
若将棘爪提起绕本身轴线转动90°,棘爪将被架在壳体的平面上,使轮与爪脱开,当棘爪往复摆动时,棘轮静止不动。
175/ 6a) b) a) b)图12-3 双动式驱动棘爪图12-4 矩形齿双向棘轮机构除外啮合棘轮机构外,还有内啮合棘轮机构(如图12-5)和棘条机构等。
棘轮机构结构简单,但不能传递大的动力,而且传动平稳性较差,不适宜于高速传动。