第二章 单自由度系统
- 格式:ppt
- 大小:2.74 MB
- 文档页数:156
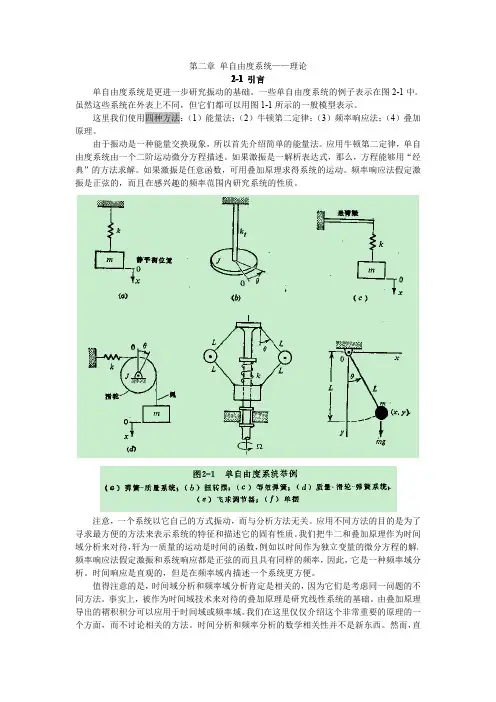
第二章单自由度系统——理论2-1引言单自由度系统是更进一步研究振动的基础。
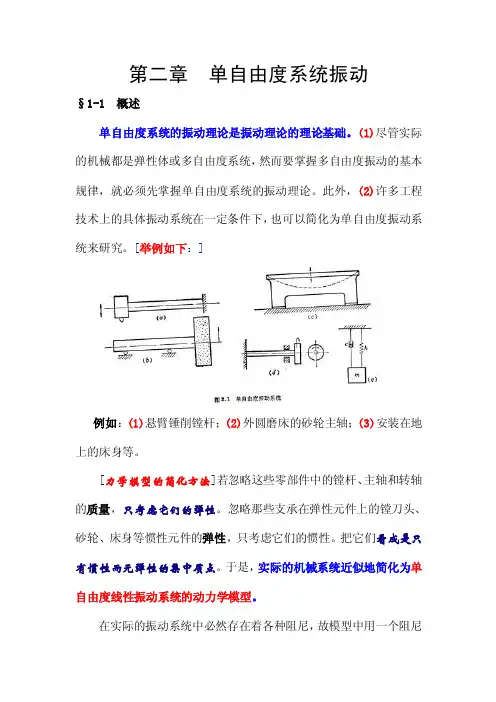
一些单自由度系统的例子表示在图2-1中。
虽然这些系统在外表上不同,但它们都可以用图1-1所示的一般模型表示。
这里我们使用四种方法:(1)能量法;(2)牛顿第二定律;(3)频率响应法;(4)叠加原理。
由于振动是一种能量交换现象,所以首先介绍简单的能量法。
应用牛顿第二定律,单自由度系统由一个二阶运动微分方程描述。
如果激振是一解析表达式,那么,方程能够用“经典”的方法求解。
如果激振是任意函数,可用叠加原理求得系统的运动。
频率响应法假定激振是正弦的,而且在感兴趣的频率范围内研究系统的性质。
注意,一个系统以它自己的方式振动,而与分析方法无关。
应用不同方法的目的是为了寻求最方便的方法来表示系统的特征和描述它的固有性质。
我们把牛二和叠加原理作为时间域分析来对待,轩为一质量的运动是时间的函数,例如以时间作为独立变量的微分方程的解。
频率响应法假定激振和系统响应都是正弦的而且具有同样的频率,因此,它是一种频率域分析。
时间响应是直观的,但是在频率域内描述一个系统更方便。
值得注意的是,时间域分析和频率域分析肯定是相关的,因为它们是考虑同一问题的不同方法。
事实上,被作为时间域技术来对待的叠加原理是研究线性系统的基础。
由叠加原理导出的褶积积分可以应用于时间域或频率域。
我们在这里仅仅介绍这个非常重要的原理的一个方面,而不讨论相关的方法。
时间分析和频率分析的数学相关性并不是新东西。
然而,直到最近几年来,电子计算机、测试设备和试验技术的进步,它才在实际中得到应用。
2-2自由度一个振动系统的自由度个数是确定这个系统状态所必需的独立的空间坐标个数。
我们定义状态为这个系统的所有质量的几何位置。
如这些质量的相互关系只需要一个空间坐标就完全确定,那么就说这个系统具有一个自由度。
对于空间一个刚体的完全确定需要六个坐标,即三个确定直线运动的坐标和三个确定旋转运动的坐标。
第二章单自由度系统振动§1-1 概述单自由度系统的振动理论是振动理论的理论基础。
(1)尽管实际的机械都是弹性体或多自由度系统,然而要掌握多自由度振动的基本规律,就必须先掌握单自由度系统的振动理论。
此外,(2)许多工程技术上的具体振动系统在一定条件下,也可以简化为单自由度振动系统来研究。
[举例如下:]例如:(1)悬臂锤削镗杆;(2)外圆磨床的砂轮主轴;(3)安装在地上的床身等。
[力学模型的简化方法]若忽略这些零部件中的镗杆、主轴和转轴的质量,只考虑它们的弹性。
忽略那些支承在弹性元件上的镗刀头、砂轮、床身等惯性元件的弹性,只考虑它们的惯性。
把它们看成是只有惯性而无弹性的集中质点。
于是,实际的机械系统近似地简化为单自由度线性振动系统的动力学模型。
在实际的振动系统中必然存在着各种阻尼,故模型中用一个阻尼器来表示。
阻尼器由一个油缸和活塞、油液组成。
汽车轮悬置系统等等。
[以上为工程实际中的振动系统]单自由度振动系统——指用一个独立参量便可确定系统位置的振动系统。
所有的单自由度振动系统经过简化,都可以抽象成单振子,即将系统中全部起作用的质量都认为集中到质点上,这个质点的质量m 称为当量质量,所有的弹性都集中到弹簧中,这个弹簧刚度k称为当量弹簧刚度。
以后讨论中,质量就是指当量质量,刚度就是指当量弹簧刚度。
在单自由度振动系统中,质量m、弹簧刚度k、阻尼系数C是振动系统的三个基本要素。
有时在振动系统中还作用有一个持续作用的激振力P。
应用牛顿运动定律,作用于一个质点上所有力的合力等于该质点的质量和该合力方向的加速度的乘积。
(牛顿运动定律)(达伦培尔原理)现取所有与坐标x 方向一致的力、速度和加速度为正,则:kx x C t P xm --= ωsin 0 (牛顿运动定律) (达伦培尔原理:在一个振动体上的所有各力的合力必等于零) (动静法分析:作用在振动体上的外力与设想加在此振动体上的惯性力组成平衡力系)上式经整理得,t P kx x C xm ωsin 0=++ (2.1) 该式就是单自由度线性振动系统的运动微分方程式的普遍式。

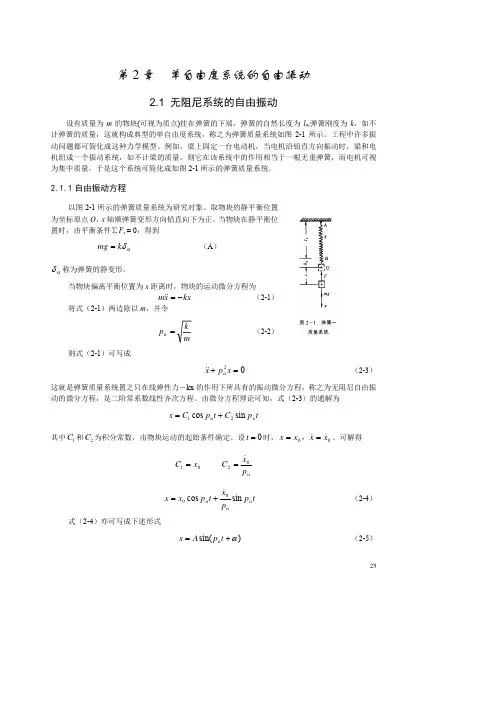
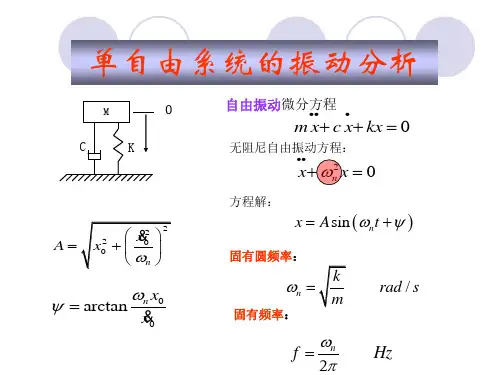
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。