第3章 多自由度系统1讲解
- 格式:ppt
- 大小:1.79 MB
- 文档页数:39

第三章 多自由度系统振动多自由度系统和单自由度系统的振动特性是有区别的。
单自由度系统受初始扰动后,按系统的固有频率作简谐振动。
多自由度系统有多个固有频率,当系统按某一个固有频率作自由振动时,各独立坐标在振动过程中相互关系是固定的,这个关系叫振幅比,也叫作主振型或模态。
主振型是多自由度系统以及弹性体振动的重要特征。
多自由度系统的振动方程是多个二阶微分方程组,这些方程一般是耦合的。
多自由度振动的求解有两种方法:直接积分法和振型叠加法。
直接积分法可直接根据微分方程求出响应,涉及的概念不多且有应用软件,本章不做介绍。
振形叠加法要先求出系统的固有频率和振型,在此基础用叠加法求响应,物理概念清楚、并且是模态分析与参数识别的理论基础。
因此本章将先用较多的篇幅介绍多自由度系统的固有振动特性、振型叠加法和传递函数。
3.1 振动微分方程虽然一些多自由度系统数目较多,有些相当复杂,但建立多自由度系统振动微分方程并没有新理论和方法,都是动力学基本理论和方法,本节只通过例题介绍多自由度系统振动微分方程基本形式。
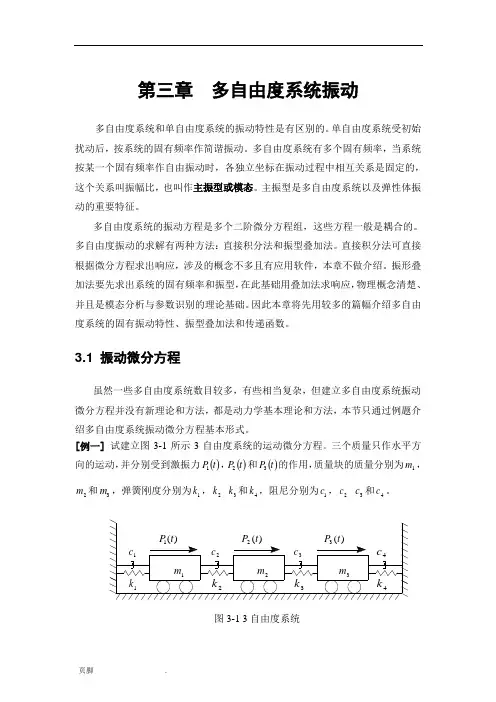
[例一] 试建立图3-1所示3自由度系统的运动微分方程。
三个质量只作水平方向的运动,并分别受到激振力()t P 1,()t P 2和()t P 3的作用,质量块的质量分别为1m ,2m 和3m ,弹簧刚度分别为1k ,2k 3k 和4k ,阻尼分别为1c ,2c 3c 和4c 。
图3-1 3自由度系统解:分别用三个独立坐标1x ,2x 和3x 描述三个质量块的运动,坐标原点分别取在1m ,2m 和3m 的静平衡位置。
质量块的速度分别为1x,2x 和3x ,加速度分别为1x,2x 和3x 。
每个质量块的受力图如3-2(a 、b 、c )所示,则由受力图根据牛顿第二定律,得系统的运动方程为:图3-2 (a) 图3-2(b)图3-2(c))()()(1212112121111t P x x c x c x x k x k xm +------= )()()()()(232321232321222t P x x c x x c x x k x x k x m +---+---= )()()(3343233432333t P x c x x c x k x x k xm +--+--= 或)()()(1221212212111t P x k x k k x c x c c xm =-++-++ )()()(23323212332321222t P x k x k k x k x c x c c x c x m =-++--++- )()()(3343233432333t P x k k x k x c c x c xm =++-++- 上述方程组可以用矩阵表示为:⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡)()()(000032132143333222213214333322221321321t P t P t P x x x k k k k k k k k k k x x x c c c c c c c c c c x x x m m m三个二阶微分方程是耦合的,这是因为矩阵中有非零的非对角元素。
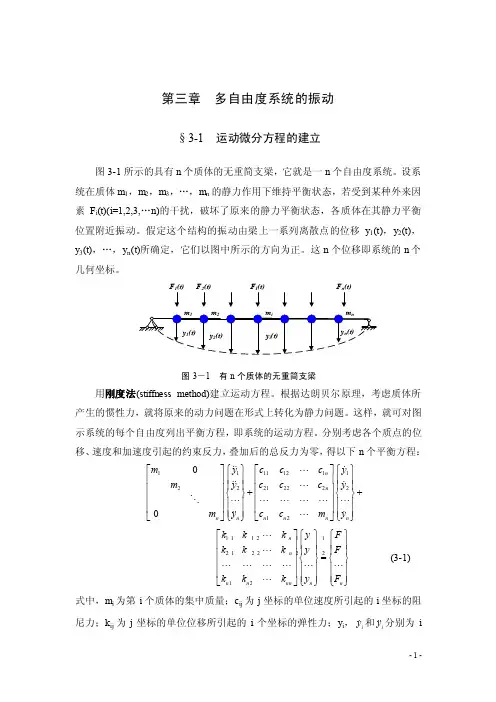
第三章 多自由度系统的振动§3-1 运动微分方程的建立图3-1所示的具有n 个质体的无重简支梁,它就是一n 个自由度系统。
设系统在质体m 1,m 2,m 3,…,m n 的静力作用下维持平衡状态,若受到某种外来因素F i (t)(i=1,2,3,…n)的干扰,破坏了原来的静力平衡状态,各质体在其静力平衡位置附近振动。
假定这个结构的振动由梁上一系列离散点的位移y 1(t),y 2(t),y 3(t),…,y n (t)所确定,它们以图中所示的方向为正。
这n 个位移即系统的n 个几何坐标。
图3-1 有n 个质体的无重简支梁用刚度法(stiffness method)建立运动方程。
根据达朗贝尔原理,考虑质体所产生的惯性力,就将原来的动力问题在形式上转化为静力问题。
这样,就可对图示系统的每个自由度列出平衡方程,即系统的运动方程。
分别考虑各个质点的位移、速度和加速度引起的约束反力,叠加后的总反力为零,得以下n 个平衡方程:111112112221222212n n n n n n n n m y c c c ym y c c c y m y c c m y⎡⎤⎧⎫⎡⎤⎧⎫⎢⎥⎪⎪⎢⎥⎪⎪⎪⎪⎪⎪⎢⎥⎢⎥++⎨⎬⎨⎬⎢⎥⎢⎥⎪⎪⎪⎪⎢⎥⎢⎥⎪⎪⎪⎪⎣⎦⎩⎭⎣⎦⎩⎭1112111212222212n n n n nn n n k kk y F k k k y F k k k y F ⎡⎤⎧⎫⎧⎫⎢⎥⎪⎪⎪⎪⎪⎪⎪⎪⎢⎥=⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎣⎦⎩⎭⎩⎭(3-1)式中,m i 为第i 个质体的集中质量;c ij 为j 坐标的单位速度所引起的i 坐标的阻尼力;k ij 为j 坐标的单位位移所引起的i 个坐标的弹性力;y i ,i y和i y 分别为i坐标的位移、速度和加速度。
式(3-1)可简写为MyCy Ky F ++= (3-2)式中,K ,M 和C 分别为系统的刚度矩阵、质量矩阵和阻尼矩阵,它们通称为系统的特性矩阵;y ,y 和y为位移、速度和加速度向量;F 为荷载向量。

4.1 多自由度系统的数学描述一、用柔度系数法和刚度系数法表示的运动方程下面以图4-1的系统为例说明多自由度系统的柔度系数及柔度矩阵。
柔度矩阵所谓柔度是指单位外“力”所引起的系统的“位移”。
具体地说,系统第个坐标上作用的单位力在第个坐标上所引起的位移就定义为柔度系数r。
如在图4-1系统中,设在质量上沿方向作用一单位力,系统相应于它产生的位移为按柔度系数的定义,就有同理,一个自由度的系统一共有个独立坐标,对应于每个单位力就有个柔度系数;总共有个单位力,故系统总共有个柔度系数(。
它们组成一个柔度矩阵(4-1)假设在系统的各个坐标上分别作用有力,则由叠加原理,系统的各个位移可表示为写成矩阵表式,有(4-2)其中与分别代表位移列阵和力列阵:也就是说,系统的位移列阵就等于系统的柔度矩阵与力列阵的乘积。
方程(4-2)称为位移方程。
应注意,本书中的“力”与“位移”都是指广义的,“力”可以是力,也可以是力偶;而“位移”可以是线位移,也可以是角位移,等等。
下面举例说明怎样求系统的柔度矩阵。
例4-1 设有集中质量与以及长为与的无重刚杆构成的复合摆,如图4-2所示,假定摆在其铅垂稳定平衡位置附近作微振动。
取质量与的水平位置与作为坐标,求系统的柔度矩阵。
解:先仅在上作用一单位水平力。
由静力平衡条件可得:因而有再仅在上作用一单位水平力。
由静力平衡条件有:考虑到可得故系统的柔度矩阵为刚度矩阵所谓刚度是指产生单位“位移”所需的各个外加“力”。
具体地说使系统仅仅在第个坐标上产生单位位移,就需要在各个坐标方向分别加上适当的力,而在第个坐标上所需加的外力,就定义为刚度系数。
一个自由度系统有个独立的坐标,对应着个单位位移,而每个单位位移又对应着个刚度系数;所以系统总共有个刚度系数,它们组成一个刚度矩阵(4-3)例如在图4-1系统中,设有这时,弹簧与没有变形,而弹簧伸长了单位长度,作用于质量上的弹簧力为(向右为正),而作用于质量上的弹簧力为-(向左为负)。
学习结构动力学多自由度系统总结
多自由度系统是研究物体在动力学状态下位置和速度轨迹问题的重要研究内容。
按照受力方式不同,可以将多自由度系统分为加速度控制和力控制两类。
加速度控制的多自由度系统的特点是可以设计速度律和位置律,对物体的加速度进行控制。
而力控制的多自由度系统可以控制物体受到的力,使物体加速度,位置和速度达到指定估计值。
除了控制方式不同,多自由度系统还有另外一些特点:首先,多自由度系统可
以采用闭环控制,即先对系统的输出进行采样,再将抽样的输出与预定的跟踪值进行比较,从而调整输入;其次,多自由度系统也可以实现双向控制,即向被控对象和来自被控对象的双向信号控制;此外,多自由度系统可以实现混合控制,即通过混合不同的控制策略,进行加速度、力和角速度控制,以完成对多自由度机械系统位置及其状态控制。
此外,学习多自由度系统还要掌握建模方法,包括几何建模和动力模型建模等
两类方法。
几何建模主要包括多体约束模型,常用的约束模型包括Coulomb约束模型、Davenport约束模型和Hooke约束模型等等;动力模型建模包括拉格朗日模型
和Lagrange余量模型等等。
总的来说,学习多自由度系统的结构动力学重点在于掌握其加速度控制、力控
制以及闭环、双向控制和混合控制等控制方法,并能熟练操作几何建模和动力模型建模,进而分析预测多自由度系统的运动轨迹。
多自由度机械系统的运动分析与控制在现代工程领域中,多自由度机械系统的应用日益广泛,从复杂的工业机器人到精密的航空航天设备,从汽车的悬挂系统到医疗设备的运动机构,都离不开对多自由度机械系统的深入研究。
对这类系统的运动分析与控制是实现其高效、精确和可靠运行的关键。
多自由度机械系统,简单来说,就是由多个能够相对运动的部件组成,每个部件的运动都会相互影响,从而形成一个复杂的整体运动。
要理解和掌握这样的系统,首先需要对其运动学和动力学特性进行分析。
运动学分析主要关注系统中各个部件的位置、速度和加速度之间的关系,而不考虑引起这些运动的力。
在多自由度机械系统中,这往往涉及到复杂的数学模型和计算。
以一个简单的机械臂为例,它可能由多个关节和连杆组成。
要确定机械臂末端执行器在空间中的位置和姿态,就需要通过一系列的坐标变换和矩阵运算来求解。
这不仅需要扎实的数学基础,还需要对机械系统的结构有清晰的认识。
动力学分析则更进一步,它考虑了作用在系统上的力和力矩以及由此产生的运动。
这对于设计控制系统、预测系统的性能以及优化系统的结构都至关重要。
例如,在设计一个用于搬运重物的机械手臂时,必须了解手臂在承受不同重量和运动状态下所受到的各种力和力矩,以确保其结构强度和稳定性,同时也为控制算法的设计提供基础。
在对多自由度机械系统进行运动分析之后,接下来就是控制的问题。
控制的目标是使系统按照预定的轨迹和性能要求运动。
常见的控制方法包括经典控制、现代控制和智能控制等。
经典控制方法,如 PID 控制,以其简单易懂和实用性在工业中得到了广泛的应用。
PID 控制器通过对误差(实际输出与期望输出之间的差异)的比例、积分和微分运算来调整控制输入,从而使系统的输出接近期望的值。
然而,对于多自由度机械系统这样的复杂对象,经典控制方法往往难以达到理想的控制效果,特别是当系统存在非线性、时变和不确定性等因素时。
现代控制理论,如状态空间法和最优控制,为多自由度机械系统的控制提供了更强大的工具。