第三章 两个自由度系统振动
- 格式:ppt
- 大小:1.94 MB
- 文档页数:41
第三章 多自由度系统振动多自由度系统和单自由度系统的振动特性是有区别的。
单自由度系统受初始扰动后,按系统的固有频率作简谐振动。
多自由度系统有多个固有频率,当系统按某一个固有频率作自由振动时,各独立坐标在振动过程中相互关系是固定的,这个关系叫振幅比,也叫作主振型或模态。
主振型是多自由度系统以及弹性体振动的重要特征。
多自由度系统的振动方程是多个二阶微分方程组,这些方程一般是耦合的。
多自由度振动的求解有两种方法:直接积分法和振型叠加法。
直接积分法可直接根据微分方程求出响应,涉及的概念不多且有应用软件,本章不做介绍。
振形叠加法要先求出系统的固有频率和振型,在此基础用叠加法求响应,物理概念清楚、并且是模态分析与参数识别的理论基础。
因此本章将先用较多的篇幅介绍多自由度系统的固有振动特性、振型叠加法和传递函数。
3.1 振动微分方程虽然一些多自由度系统数目较多,有些相当复杂,但建立多自由度系统振动微分方程并没有新理论和方法,都是动力学基本理论和方法,本节只通过例题介绍多自由度系统振动微分方程基本形式。
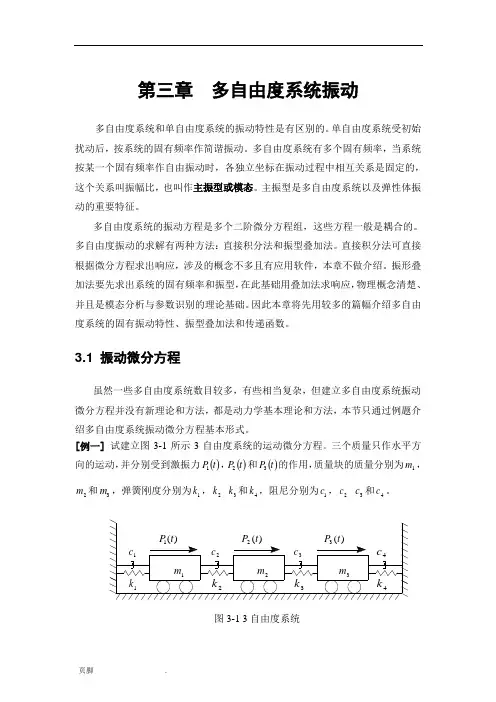
[例一] 试建立图3-1所示3自由度系统的运动微分方程。
三个质量只作水平方向的运动,并分别受到激振力()t P 1,()t P 2和()t P 3的作用,质量块的质量分别为1m ,2m 和3m ,弹簧刚度分别为1k ,2k 3k 和4k ,阻尼分别为1c ,2c 3c 和4c 。
图3-1 3自由度系统解:分别用三个独立坐标1x ,2x 和3x 描述三个质量块的运动,坐标原点分别取在1m ,2m 和3m 的静平衡位置。
质量块的速度分别为1x,2x 和3x ,加速度分别为1x,2x 和3x 。
每个质量块的受力图如3-2(a 、b 、c )所示,则由受力图根据牛顿第二定律,得系统的运动方程为:图3-2 (a) 图3-2(b)图3-2(c))()()(1212112121111t P x x c x c x x k x k xm +------= )()()()()(232321232321222t P x x c x x c x x k x x k x m +---+---= )()()(3343233432333t P x c x x c x k x x k xm +--+--= 或)()()(1221212212111t P x k x k k x c x c c xm =-++-++ )()()(23323212332321222t P x k x k k x k x c x c c x c x m =-++--++- )()()(3343233432333t P x k k x k x c c x c xm =++-++- 上述方程组可以用矩阵表示为:⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡)()()(000032132143333222213214333322221321321t P t P t P x x x k k k k k k k k k k x x x c c c c c c c c c c x x x m m m三个二阶微分方程是耦合的,这是因为矩阵中有非零的非对角元素。
第三章两自由度系统振动§3-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
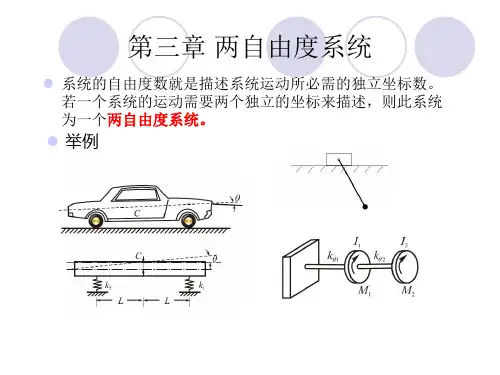
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
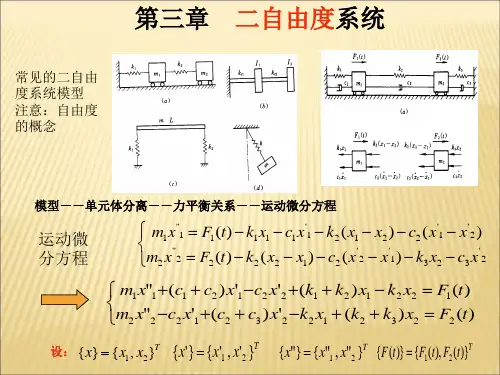
很多生产实际中的问题都可以简化为两自由度的振动系统。
例如,车床刀架系统(a)、车床两顶尖间的工件系统(b)、磨床主轴及砂轮架系统(c)。
只要将这些系统中的主要结合面(或芯轴)视为弹簧(即只计弹性,忽略质量),将系统中的小刀架、工件、砂轮及砂轮架等视为集中质量,再忽略存在于系统中的阻尼,就可以把这些系统近似简化成图(d)所示的两自由度振动系统的动力学模型。
以图3.1(c)所示的磨床磨头系统为例分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的,具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成是支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而把砂轮架与进刀拖板的结合面看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地可以看成是支承在进刀拖板上的另一个弹簧——质量系统。
这样,磨头系统就可以近似地简化为图示的支承在进刀拖板上的两自由度系统。
在这一系统的动力学模型中,m1是砂轮架的质量,k1是砂轮架支承在进刀拖板上的静刚度,m2是砂轮及其主轴系统的质量,k2是砂轮主轴支承在砂轮架轴承上的静刚度。
取每个质量的静平衡位置作为坐标原点,取其铅垂位移x1及x2分别作为各质量的独立坐标。
这样x1和x2就是用以确定磨头系统运动的广义坐标。
(工程实际中两自由度振动系统) [工程实例演示]§3-2 两自由度系统的自由振动一、系统的运动微分方程(①汽车动力学模型)②以图3.2的双弹簧质量系统为例。
《汽车振动基础》课程教学大纲一、课程基本信息课程类别:专业选修课适用专业:汽车车辆工程专业先修课程:汽车构造、汽车诊断与维修总学时:56学分:3二、课程教学目的与基本要求本课程主要任务是,学习汽车机械振动力学的基本理论和方法及分析振动问题的数学方法。
主要内容包括:单自由度系统的振动、两个自由度系统的振动、多自由度系统的振动,连续系统的振动,并介绍了求解特征值问题和系统响应的近似方法及数值计算方法,简要叙述了非线性振动和随机振动的基本概念和理论。
三、教学时数分配四、教学内容与要求第一章绪论(一)教学目的:理解机械振动的概念,了解振动系统研究方法,掌握振动的分类,会分析振动问题并提出解决方法。
(二)教学内容:1 基本要素 2 研究方法 3 分类和表示方法(三)重点:振动系统基本要素(四)难点:振动系统分类和表示方法第二章单自由度系统的振动(一)本章教学目的:理解单自由度系统的自由振动的概念,掌握单自由度系统的强迫振动,掌握汽车车身单自由度系统的振动。
(二)教学内容:1 自由振动 2 强迫振动 3 非简谐激励下的强迫振动4 汽车车身单自由度系统的振动(三)重点:单自由度系统的自由振动(四)难点:汽车车身单自由度系统的振动第三章二自由度系统的振动(一)教学目的:了解二自由度系统的运动微分方程,掌握无阻尼二自由度系统的振动,有阻尼二自由度振动系统和汽车的二自由度系统的振动。
(二)教学内容:1 二自由度系统的运动微分方程2 无阻尼二自由度系统的振动3 有阻尼二自由度振动系统4 汽车的二自由度系统的振动(三)重点:无阻尼二自由度系统的振动(四)难点:汽车的二自由度系统的振动第四章多自由度系统的振动(一)本章教学目的:理解多自由度振动系统的运动微分方程,掌握固有振型的正交性、模态坐标和正则坐标和汽车多自由度振动模型。
(二)教学内容:1 多自由度振动系统的运动微分方程2 固有振型的正交性、模态坐标和正则坐标3 多自由度系统的响应4 拉格朗日方程在振动分析中的应用5 汽车多自由度振动模型(三)重点:固有振型的正交性、模态坐标和正则坐标(四)难点:汽车多自由度振动模型第五章随机振动理论(一)教学目的:了解随机振动概述及随机振动的统计特性,线性振动系统的随机响应计算。