第三章_二自由度系统
- 格式:ppt
- 大小:1.50 MB
- 文档页数:6
![[工学]企业综合自动化课程资料第3章自由度分析](https://uimg.taocdn.com/1153ca7149d7c1c708a1284ac850ad02de80071f.webp)
第三章 自由度分析3.1自由度概念化工流程模拟从本质上讲就是用不同的方法求解不同类型、不同规模的方程组求得有关未知变量的问题。
一个基本问题就是确定未知数数目(m )与独立方程数(n )之间的关系。
考察由m 个未知变量和n 个独立方程构成的模型方程组:0)(=X F 式中,),,,(21m x x x X "= ),,,(21n f f f F "=根据方程理论,n 个方程只能对n 个变量求解,因此,必须有m -n 个变量在求解方程之前被确定。
这个在求解方程之前必须确定其值的变量数(m -n )称作自由度,用符号d 表示:n m d −=显然,自由度实际上就是独立变量数。
自由度d 有三种情况:(1) 0=d ,即n m =,独立方程数与未知变量数相同,方程有唯一解; (2) 0>d ,即n m >,未知变量数比独立方程数多,(设定不足),必须指定多余的)(n m −个未知变量的值方程才有唯一解,否则有无穷多解,——方程解不确定。
(3) 0<d ,即n m <,独立方程数比未知变量数多,(设定过度),有多余的方程,不同方程之间会出现矛盾,方程组无解。
在过程模拟之前,通过自由度分析正确地确定独立变量数,可以避免由于设定不足和设定过度而引起的方程组无解。
看起来确定自由度十分容易,实际上并非如此。
例如混合单元如图,我们可能会写出下列物料衡算方程:),,1(,33,22,11,c i F x F x F x i i i "==+ 321F F F =+111,=∑=ci i x112,=∑=ci i x113,=∑=ci i x式中,j F ——第j 股流的摩尔流量;j i x ,——第j 股流组分i 的摩尔分率。
上述方程共有4+c 个,变量数33+c 个,可得到自由度12−c 。
实际上这些方程不是相互独立的。
组分平衡方程各式相加可得到总物料平衡。
因此独立方程数应该是3+c ,正确的自由度为c 2。
机械振动学总结 第一章 机械振动学基础第二节 机械振动的运动学概念第三节机械振动是种特殊形式的运动。
在这运动过程中,机械振动系统将围绕其平衡位置作往复运动。
从运动学的观点看,机械振动式研究机械系统的某些物理量在某一数值近旁随时间t 变化的规律。
用函数关系式来描述其运动。
如果运动的函数值,对于相差常数T 的不同时间有相同的数值,亦即可以用周期函数来表示,则这一个运动时周期运动。
其中T 的最小值叫做振动的周期,Tf 1=定义为振动的频率。
简谐振动式最简单的振动,也是最简单的周期运动。
一、简谐振动物体作简谐振动时,位移x 和时间t 的关系可用三角函数的表示为式中:A 为振幅,T 为周期,ϕ和ψ称为初相角。
如图所示的正弦波形表示了上式所描述的运动,角速度ω称为简谐振动的角频率简谐振动的速度和加速度就是位移表达式关于时间t 的一阶和二阶导数,即可见,若位移为简谐函数,其速度和加速度也是简谐函数,且具有相同的频率。
因此在物体运动前加速度是最早出现的量。
可以看出,简谐振动的加速度,其大小与位移成正比,而方向与位移相反,始终指向平衡位置。
这是简谐振动的重要特征。
在振动分析中,有时我们用旋转矢量来表示简谐振动。
图P6旋转矢量的模为振幅A ,角速度为角频率ω若用复数来表示,则有)sin()cos()(ψωψωψω+++==+t jA t A z Ae z t j用复指数形式描述简谐振动,给计算带来了很多方便。
因为复指数t j e ω对时间求导一次相当于在其前乘以ωj ,而每乘一次j ,相当于有初相角2π。
二.周期振动满足以下条件:1)函数在一个周期内连续或只有有限个间断点,且间断点上函数左右极限存在;2)在一个周期内,只有有限个极大和极小值。
则都可展成Fourier 级数的形式,若周期为T 的周期振动函数,则有式中22n n n b a A += nn n b a =ψt a n 三、简谐振动的合成一、同方向振动的合成1.俩个同频率的简谐振动)sin(222ψω+=t A x ,)sin(2222ψω+=t A x它们的合成运动也是该频率的简谐振动2.俩个不同频率振动的合成若21ωω≤,则合成运动为若21ωω≥ ,对于A A A ==21 ,则有上式可表示为二、两垂直方向振动的合成1.同频率振动的合成如果沿x 方向的运动为沿y 方向的运动为2不同频率振动的合成对于俩个不等的简谐运动它们的合成运动也能在矩形中画出各种曲线。
《汽车振动基础》课程教学大纲一、课程基本信息课程类别:专业选修课适用专业:汽车车辆工程专业先修课程:汽车构造、汽车诊断与维修总学时:56学分:3二、课程教学目的与基本要求本课程主要任务是,学习汽车机械振动力学的基本理论和方法及分析振动问题的数学方法。
主要内容包括:单自由度系统的振动、两个自由度系统的振动、多自由度系统的振动,连续系统的振动,并介绍了求解特征值问题和系统响应的近似方法及数值计算方法,简要叙述了非线性振动和随机振动的基本概念和理论。
三、教学时数分配四、教学内容与要求第一章绪论(一)教学目的:理解机械振动的概念,了解振动系统研究方法,掌握振动的分类,会分析振动问题并提出解决方法。
(二)教学内容:1 基本要素 2 研究方法 3 分类和表示方法(三)重点:振动系统基本要素(四)难点:振动系统分类和表示方法第二章单自由度系统的振动(一)本章教学目的:理解单自由度系统的自由振动的概念,掌握单自由度系统的强迫振动,掌握汽车车身单自由度系统的振动。
(二)教学内容:1 自由振动 2 强迫振动 3 非简谐激励下的强迫振动4 汽车车身单自由度系统的振动(三)重点:单自由度系统的自由振动(四)难点:汽车车身单自由度系统的振动第三章二自由度系统的振动(一)教学目的:了解二自由度系统的运动微分方程,掌握无阻尼二自由度系统的振动,有阻尼二自由度振动系统和汽车的二自由度系统的振动。
(二)教学内容:1 二自由度系统的运动微分方程2 无阻尼二自由度系统的振动3 有阻尼二自由度振动系统4 汽车的二自由度系统的振动(三)重点:无阻尼二自由度系统的振动(四)难点:汽车的二自由度系统的振动第四章多自由度系统的振动(一)本章教学目的:理解多自由度振动系统的运动微分方程,掌握固有振型的正交性、模态坐标和正则坐标和汽车多自由度振动模型。
(二)教学内容:1 多自由度振动系统的运动微分方程2 固有振型的正交性、模态坐标和正则坐标3 多自由度系统的响应4 拉格朗日方程在振动分析中的应用5 汽车多自由度振动模型(三)重点:固有振型的正交性、模态坐标和正则坐标(四)难点:汽车多自由度振动模型第五章随机振动理论(一)教学目的:了解随机振动概述及随机振动的统计特性,线性振动系统的随机响应计算。
摘要本文讨论的内容是双自由度控制。
通过对单自由度控制与双自由控制分别进行了举例研究,阐述了两种控制器各自的特性,说明了双自由控制的突出优点。
阐述了双自由控制器是如何独立的对系统的目标跟踪值特性和干扰抑制特性分别独立的进行调节,从而使系统同时获得最优的目标跟踪值特性以及干扰抑制特性。
通过与现在应用最广泛的PID控制器的结合,设计出了双自由PID控制系统.并研究如何对于给定的系统设计出独立的两个控制器,实现控制系统的输出对参考输入的高精密度跟踪,以及对扰动输入的响应具有很小的振幅,并能很快衰减到零即无稳态误差,并给予了基于MATLAB/SIMULINK软件的仿真举例。
关键词: 控制器双自由度PID控制器干扰抑制高精密跟踪ABSTRACTThis article discusses the contents of two degrees of freedom control。
The Characteristic of two degrees of freedom control and single degrees of freedom control is Elaborated giving examples.the advantage of two degrees of freedom control is explained. the method how do the two degrees of freedom controller adjust the feature of tracking value and interference suppression characteristics is explained. By doing that,the system could gain the best feature of tracking value and interference suppression characteristics at the same time. The two degrees of freedom PID is designed controller by combining PID controller。
1α,小车与斜面之间摩擦力gk PT π2=,⎪⎭⎫ ⎝⎛+=α2sin 2k P h k P A2。
()2234mr a r k n +=ω 3.确定图2-3系统的固有频率。
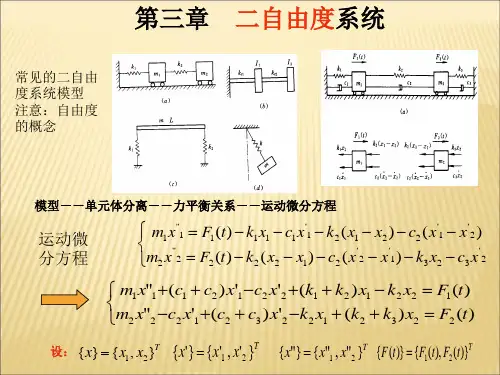
()r R gn -=32ω图2-3第三章 两自由度系统振动§3-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度的振动系统。
例如,车床刀架系统(a )、车床两顶尖间的工件系统(b )、磨床主轴及砂轮架系统(c )。
只要将这些系统中的主要结合面(或芯轴)视为弹簧(即只计弹性,忽略质量),将系统中的小刀架、工件、砂轮及砂轮架等视为集中质量,再忽略存在于系统中的阻尼,就可以把这些系统近似简化成图(d)所示的两自由度振动系统的动力学模型。
以图3.1(c)所示的磨床磨头系统为例分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的,具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成是支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而把砂轮架与进刀拖板的结合面看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地可以看成是支承在进刀拖板上的另一个弹簧——质量系统。
这样,磨头系统就可以近似地简化为图示的支承在进刀拖板上的两自由度系统。
在这一系统的动力学模型中,m1是砂轮架的质量,k1是砂轮架支承在进刀拖板上的静刚度,m2是砂轮及其主轴系统的质量,k2是砂轮主轴支承在砂轮架轴承上的静刚度。
第一章 单自由度系统1.1 总结求单自由度系统固有频率的方法和步骤。
单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。
1、 牛顿第二定律法适用范围:所有的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析,得到系统所受的合力;(2) 利用牛顿第二定律∑=F x m,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
2、 动量距定理法适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析和动量距分析;(2) 利用动量距定理J ∑=M θ,得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、 拉格朗日方程法:适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ; (2)由格朗日方程θθ∂∂-∂∂∂LL dt )( =0,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、 能量守恒定理法适用范围:所有无阻尼的单自由度保守系统的振动。
解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const (2)将能量守恒定理T+U=Const 对时间求导得零,即0)(=+dtU T d ,进一步得到系统的运动微分方程;(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
1.2 叙述用衰减法求单自由度系统阻尼比的方法和步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。
第三章内容171543517 马千里 1.二自由陀螺进动特性设二自由度陀螺以角速度自转,自转角速度的矢量朝左。
同时,内框又带着转子绕y 轴转动,牵连角速度w 矢量朝上。
在自转角速度和牵连角速度的共同作用下,二自由度陀螺会产生绕内框轴的陀螺力矩L ,其方向朝前。
在此力矩的作用下,陀螺以角速度W 进绕内框轴转动,称为二自由度陀螺的进动。
作用:测量飞机的角速度和角位移。
二自由度陀螺进动方向与陀螺力矩方向一致,即牵连角速度方向绕转子自转方向转过90度的方向。
二、二自由度陀螺的受迫运动:在当二自由度陀螺沿内框轴有外力矩作用时,由于陀螺不能绕y 轴转动,因而也就不能绕内框轴产生陀螺力矩同外力矩平衡; 外力矩的作用下,陀螺将像普通物体一样,加速转动;外力矩消失后,陀螺并不停止转动,而像普通物体一样等速旋转; 二自由度陀螺的这种运动称为受迫运动。
二自由度陀螺进动与三自由度陀螺进动的区别:①三自由度陀螺在常值外力矩作用下是等速度进动;二自由度陀螺在常值牵连角速度作用下是加速进动。
②三自由度陀螺在外力矩消失后立即停止运动;二自由度陀螺在牵连角速度消失后维持等角速度进动。
二自由度陀螺没有稳定性:二自由度陀螺只有两个自由度,当它受到绕内框轴的冲量矩作用时,不能像三自由度陀螺那样绕外框旋转(没有外框轴),因而不能借助于陀螺力矩,使陀螺绕内、外框轴的转动互相影响,形成章动,保持转子轴大方向。
当基座绕y轴转动时,由于陀螺力矩使陀螺绕内环轴进动,转子轴方位就要改变,不能保持原来的方位。
2.速度陀螺的基本原理速度陀螺仪:利用二自由度陀螺测量飞机(或其他航行器)角速度的仪表,称为二自由度速度陀螺仪,常简称速度陀螺仪。
它是飞机上的重要仪表之一。
1、组成及作用速度陀螺仪由二自由度陀螺、平衡弹簧和阻尼器等部分组成。
二自由度陀螺的Y 轴与内框轴和自转轴均垂直,是速度陀螺仪的输入轴,仪表可以测出绕该轴的角速度。
二自由度陀螺:当飞机转弯时,产生陀螺力矩。