数字时域均衡器
- 格式:docx
- 大小:256.93 KB
- 文档页数:6
均衡器参数详解2009-10-17 09:171、均衡器的调整方法:超低音: 20Hz-40Hz,适当时声音强而有力。
能控制雷声、低音鼓、管风琴和贝司的声音。
过度提升会使音乐变得混浊不清。
低音: 40Hz-150Hz,是声音的基础部份,其能量占整个音频能量的70%,是表现音乐风格的重要成份。
适当时,低音张弛得宜,声音丰满柔和,不足时声音单薄,150Hz,过度提升时会使声音发闷,明亮度下降,鼻音增强。
中低音: 150Hz-500Hz,是声音的结构部分,人声位于这个位置,不足时,演唱声会被音乐淹没,声音软而无力,适当提升时会感到浑厚有力,提高声音的力度和响度。
提升过度时会使低音变得生硬,300Hz处过度提升3-6dB,如再加上混响,则会严重影响声音的清晰度。
中音: 500Hz-2KHz,包含大多数乐器的低次谐波和泛音,是小军鼓和打击乐器的特征音。
适当时声音透彻明亮,不足时声音朦胧。
过度提升时会产生类似电话的声音。
中高音: 2KHz-5KHz,是弦乐的特征音(拉弦乐的弓与弦的摩搡声,弹拔乐的手指触弦的声音某)。
不足时声音的穿透力下降,过强时会掩蔽语言音节的识别。
高音: 7KHz-8KHz,是影响声音层次感的频率。
过度提升会使短笛、长笛声音突出,语言的齿音加重和音色发毛。
极高音: 8KHz-10KHz合适时,三角铁和立*的金属感通透率高,沙钟的节奏清晰可辨。
过度提升会使声音不自然,易烧毁高频单元。
2、平衡悦耳的声音应是:150Hz以下(低音)应是丰满、柔和而富有弹性;150Hz-500Hz(中低音)应是浑厚有力百不混浊;500Hz-5KHz(中高音)应是明亮透彻而不生硬;5KHz以上(高音)应是纤细,园顺而不尖锐刺耳。
整个频响特性平直时:声音自然丰满而有弹性,层次清晰园顺悦耳。
频响多峰谷时:声音粗糙混浊,高音刺耳发毛,无层次感扩声易发生反馈啸叫。
3、频率的音感特征:30~60Hz 沉闷如没有相当大的响度,人耳很难感觉。
均衡器参数详解2009-10-17 09:171、均衡器的调整方法:超低音: 20Hz-40Hz,适当时声音强而有力。
能控制雷声、低音鼓、管风琴和贝司的声音。
过度提升会使音乐变得混浊不清。
低音: 40Hz-150Hz,是声音的基础部份,其能量占整个音频能量的70%,是表现音乐风格的重要成份。
适当时,低音张弛得宜,声音丰满柔和,不足时声音单薄,150Hz,过度提升时会使声音发闷,明亮度下降,鼻音增强。
中低音: 150Hz-500Hz,是声音的结构部分,人声位于这个位置,不足时,演唱声会被音乐淹没,声音软而无力,适当提升时会感到浑厚有力,提高声音的力度和响度。
提升过度时会使低音变得生硬,300Hz处过度提升3-6dB,如再加上混响,则会严重影响声音的清晰度。
中音: 500Hz-2KHz,包含大多数乐器的低次谐波和泛音,是小军鼓和打击乐器的特征音。
适当时声音透彻明亮,不足时声音朦胧。
过度提升时会产生类似电话的声音。
中高音: 2KHz-5KHz,是弦乐的特征音<拉弦乐的弓与弦的摩搡声,弹拔乐的手指触弦的声音某)。
不足时声音的穿透力下降,过强时会掩蔽语言音节的识别。
高音: 7KHz-8KHz,是影响声音层次感的频率。
过度提升会使短笛、长笛声音突出,语言的齿音加重和音色发毛。
极高音: 8KHz-10KHz合适时,三角铁和立*的金属感通透率高,沙钟的节奏清晰可辨。
过度提升会使声音不自然,易烧毁高频单元。
2、平衡悦耳的声音应是:150Hz以下<低音)应是丰满、柔和而富有弹性;150Hz-500Hz<中低音)应是浑厚有力百不混浊;500Hz-5KHz<中高音)应是明亮透彻而不生硬;5KHz以上<高音)应是纤细,园顺而不尖锐刺耳。
整个频响特性平直时:声音自然丰满而有弹性,层次清晰园顺悦耳。
频响多峰谷时:声音粗糙混浊,高音刺耳发毛,无层次感扩声易发生反馈啸叫。
3、频率的音感特征:30~60Hz 沉闷如没有相当大的响度,人耳很难感觉。
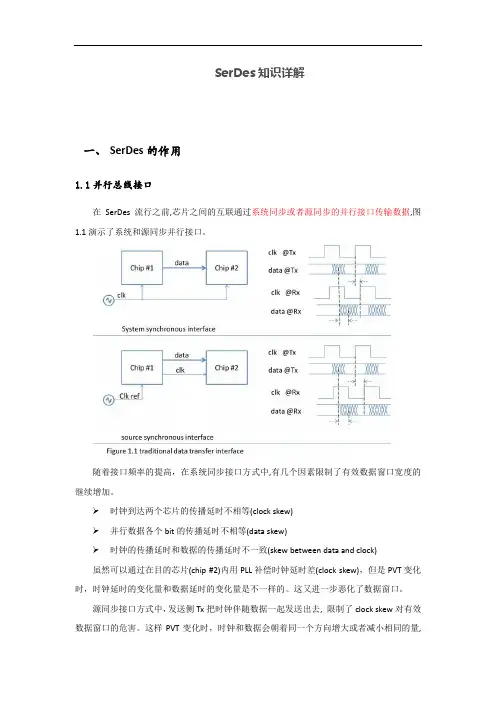
SerDes知识详解一、SerDes的作用1.1并行总线接口在SerDes流行之前,芯片之间的互联通过系统同步或者源同步的并行接口传输数据,图1.1演示了系统和源同步并行接口。
随着接口频率的提高,在系统同步接口方式中,有几个因素限制了有效数据窗口宽度的继续增加。
➢时钟到达两个芯片的传播延时不相等(clock skew)➢并行数据各个bit的传播延时不相等(data skew)➢时钟的传播延时和数据的传播延时不一致(skew between data and clock)虽然可以通过在目的芯片(chip #2)内用PLL补偿时钟延时差(clock skew),但是PVT变化时,时钟延时的变化量和数据延时的变化量是不一样的。
这又进一步恶化了数据窗口。
源同步接口方式中,发送侧Tx把时钟伴随数据一起发送出去, 限制了clock skew对有效数据窗口的危害。
这样PVT变化时,时钟和数据会朝着同一个方向增大或者减小相同的量,对skew最有利。
我们来做一些合理的典型假设,假设一个32bit数据的并行总线,a)发送端的数据skew = 50 ps ---很高的要求b)pcb走线引入的skew = 50ps ---很高的要求c)时钟的周期抖动jitter = +/-50 ps ---很高的要求d)接收端触发器采样窗口= 250 ps ---Xilinx V7高端器件的IO触发器可以大致估计出并行接口的最高时钟= 1/(50+50+100+250) = 2.2GHz (DDR)或者1.1GHz (SDR)。
利用源同步接口,数据的有效窗口可以提高很多。
通常频率都在1GHz以下。
在实际应用中可以见到如SPI4.2接口的时钟可以高达DDR 700MHz x 16bits位宽。
DDR Memory接口也算一种源同步接口,如DDR3在FPGA中可以做到大约800MHz的时钟。
要提高接口的传输带宽有两种方式,一种是提高时钟频率,一种是加大数据位宽。
EQ均衡器EQ是Equalizer的缩写,中国大陆地区称呼为均衡器,港台地区称呼为等化器。
它的作用就是调整各频段信号的增益值。
普通百姓最初接触均衡器是在80年代的高级录放机上,当年的高档录放机都带有N段均衡调节,那个调节器就是均衡器。
这个均衡器是基于模拟信号的,后来在PC上逐渐发展出了数字均衡器。
对于大部分电脑用户,他们接触得最多的数字均衡器来自播放软件。
EQ均衡器 - 定义EQ通过将声音中各频率的组成泛音等级加以修改,专为某一类音乐进行优化,增强人们的感觉。
常见包括:正常、摇滚、流行、舞曲、古典、柔和、爵士、金属、重低音和自定义。
自定义就是自己调节,没有套用固定的模式,按个人喜好而定的真正EQ能够满足了不同的个人听音喜好。
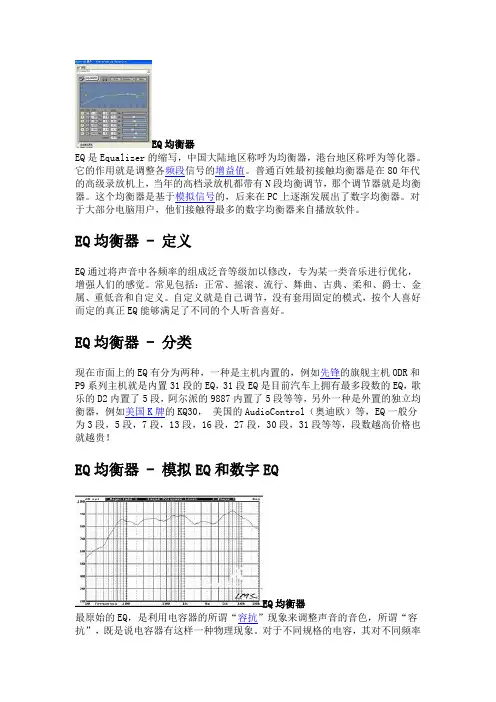
EQ均衡器 - 分类现在市面上的EQ有分为两种,一种是主机内置的,例如先锋的旗舰主机ODR和P9系列主机就是内置31段的EQ,31段EQ是目前汽车上拥有最多段数的EQ,歌乐的D2内置了5段,阿尔派的9887内置了5段等等,另外一种是外置的独立均衡器,例如美国K牌的KQ30,美国的AudioControl(奥迪欧)等,EQ一般分为3段,5段,7段,13段,16段,27段,30段,31段等等,段数越高价格也就越贵!EQ均衡器 - 模拟EQ和数字EQEQ均衡器最原始的EQ,是利用电容器的所谓“容抗”现象来调整声音的音色,所谓“容抗”,既是说电容器有这样一种物理现象。
对于不同规格的电容,其对不同频率交流电信号有减弱或提升的现象。
声音从mic转化后会变成交流电信号,电流I 会正比于声音振幅(其实只能近似正比)。
I通过导线进入EQ,用一个3段EQ 的理论电路来举例:3个不同规格的电容器分别负责调整高频,中频和低频。
由于三个电容分别对高,中,低频率的敏感程度不一样,人们便可以通过调整各个电容的电流传输效率来产生EQ效果。
这种利用物理现象的方法是明智又省力的,而且相当精确!但是随着数码录音技术的发展,录音师们开始喜欢在后期加入EQ,传统EQ便不能满足需要了。
《数据通信原理》综合练习题与答案一、填空题1、白噪声是(指其功率谱密度在整个频率范围内都是均匀分布的)。
2、高斯噪声是(其任意n 维概率密度分布都服从高斯分布)。
3、散粒噪声和热噪声均是(0均值的高斯白噪声)。
4、数据通信中常用的二进制代码有(国际5号码)、(国际电报2号码)、(EBCDIC 码)和(信息交换用汉字代码)。
5、国际电报2号码是(5)单位代码。
6、数据通信系统主要由(中央计算机系统)、(数据终端设备)和(数据电路)三部分组成。
7、数据电路由(DCE)和(传输信道)组成。
8、数据链路由(数据电路)和(传输控制器)组成。
9、主机的主要功能是(数据处理)。
10、若每秒传送N 个M 进制的码元,则码元传输速率为(N Bd ),信息传输速率为(M N 2log s bit /)。
11、数据信号的基本传输方式有(基带传输)、(频带传输)和(数字数据传输)。
12、根据数据电路的传输能力可以有(单工传输)、 (半双工传输)和(全双工传输)三种传输方式。
13、数据传输中差错率一般用(误码(比特)率)、(误字符率)和(误码组率)来定义。
14、信道容量是指(信道在单位时间内所能传送的最大信息量) ,其单位为(bit /s)。
15、基带传输是(不搬移基带信号频谱的传输方式)。
16、基带数据传输系统中发送滤波器的作用是(限制信号频带并起波形形成作用),接收滤波器的作用是(滤除噪声和干扰并起波形形成作用)。
17、基带传输最佳化的条件是18、频带传输系统中接收带通的作用是(除去信道中的带外噪声)。
21)()()(f H f R f T ==19、数字调幅可分为(单边带调制)、(双边带调制)、(残余边带调制)和(正交调幅)四类。
20、2PSK的功率谱密度与(抑制载频的2ASK)的相同。
21、2DPSK的解调方法有(极性比较法)和(相位比较法)两种。
22、V.32建议提出了(16QAM)和(32TCM)两种调制方案。
1、按传输媒介来分,通信系统可分为__________和__________。
2、八进制数字信号信息传输速率为600b/s,其码元速率为__________,若传送1小时后,接收到10个错误码元,其误码率为。
3、一个均值为零的平稳高斯窄带噪声,它的包络一维分布服从_________ ,相位一维分布服从_______________。
4、已知平稳随机过程自相关函数为R(τ),均值为m,协方差为C(τ),那么_________ ,_______________。
5、码长n=15的汉明码,监督位应是_________位,信息位为_________位。
1、一个二进制数字信号一分钟传送了18000bit的信息量,其码元速率为___________,若改用8进制数字信号传输,信息数率不变,这时码元速率为___________。
2、数字信号有时也称离散信号,这个离散是指信号的___________是离散变化的,而不一定指___________离散。
3、设输入随机过程x(t)是平稳的,功率谱为Px(w),加于系统H(w)上,则输出过程y(t)的功率谱Py(w)等于___________,它们之间的互功率谱Pxy(w)等于___________。
4、一个能量信号的自相关函数R(τ)与能量谱密度P(w)之间的关系是___________,R(0)的物理意义表示___________。
5、通常n位奇偶监督码可以检测出_________位错误,编码效率为_________。
1.在AM、DSB、SSB、VSB(残留边带)及FM等五个模拟通信系统中,抗噪性能最好的是,当基带信号相同时,占用信道频带最小的是。
2.话音对数压缩的二个国际标准分别是,我国采用的是。
3.在数字通信中,最佳接收是一个相对的概念,在分析确知信号的接收时,采用的最佳接收准则是。
4.在数字基带传输系统中插入时域均衡器,其目的是。
5.根据信道传输函数k(t)的时变特性的不同可以将调制分为两大类和。
第二章(信道)习题及其答案【题2-1】设一恒参信道的幅频特性和相频特性分别为0()()d H K t ωϕωω⎧=⎨=-⎩其中,0,d K t 都是常数。
试确定信号()s t 通过该信道后的输出信号的时域表达式,并讨论之。
【答案2-1】 恒参信道的传输函数为:()0()()d j t j H H e K e ωϕωωω-==,根据傅立叶变换可得冲激响应为:0()()d h t K t t σ=-。
根据0()()()i V t V t h t =*可得出输出信号的时域表达式:000()()()()()()d d s t s t h t s t K t t K s t t δ=*=*-=-讨论:题中条件满足理想信道(信号通过无畸变)的条件:()d d H ωωφωωτττ⎧=⎨⎩常数()=-或= 所以信号在传输过程中不会失真。
【题2-2】设某恒参信道的幅频特性为[]0()1cos d j t H T e ωω-=+,其中d t 为常数。
试确定信号()s t 通过该信道后的输出表达式并讨论之。
【答案2-2】 该恒参信道的传输函数为()0()()(1cos )d j t j H H e T e ωϕωωωω-==+,根据傅立叶变换可得冲激响应为:0011()()()()22d d d h t t t t t T t t T δδδ=-+--+-+根据0()()()i V t V t h t =⊗可得出输出信号的时域表达式:0000011()()()()()()()2211 ()()()22d d d d d d s t s t h t s t t t t t T t t T s t t s t t T s t t T δδδ⎡⎤=⊗=⊗-+--+-+⎢⎥⎣⎦=-+--+-+讨论:和理想信道的传输特性相比较可知,该恒参信道的幅频特性0()(1cos )H T ωω=+不为常数,所以输出信号存在幅频畸变。
其相频特性()d t ϕωω=-是频率ω的线性函数,所以输出信号不存在相频畸变。
2.设计原理2.1数字滤波器数字滤波器的原理简介数字滤波器的功能是把输入序列通过一定的运算,变换成输出序列。
数字滤波器一般可用两种方法实现:一种是根据描述数字滤波器的数学模型或信号流程图,用数字硬件构成专用的数字信号处理机,即硬件方式;另一种是编写滤波器运算程序,在计算机上运行,即软件方式。
考虑到软件的灵活性及易于实现,本文采用软件方式实现数字滤波器。
数字滤波器有无限冲激响应(IIR)和有限冲激响应(FIR)两种。
下面分别介绍:(1) IIR滤波器IIR滤波器的特点是:单位冲激响应h(n)是无限长的;系统函数H(z)在有限长Z平面(0<|Z|<∞)有极点存在;结构上存在输出到输入的反馈,也即结构上是递归型的;因果稳定的IIR滤波器其全部极点一定在单位圆内。
其系统函数为(1)计算机上实现时则需要用到差分方程的形式,如下(2)IIR滤波器有四种基本的网络结构(具体参看文献[3]),直接I型、直接II型、级联型与并联型。
其中直接I型需要2N个延迟单元,而直接II型只需要N个延迟单元。
因此,用软件实现时,直接II型少占用存储单元。
级联型则是将N阶IIR系统函数分解成二阶因式连乘积,并联型则是将系统函数化成部分分式之和,则可得到IIR数字滤波器的并联结构。
(2) FIR滤波器IIR滤波器的特点是:系统的单位冲激响应h(n)是个有限长序列;系统函数|H(z)|在|z|>0处收敛,极点全部在z=0处(即FIR一定为稳定系统);结构上主要是非递归结构,没有输出到输入反馈。
但有些结构中(例如频率抽样结构)也包含有反馈的递归部分。
其系统函数的一般形式为(3)对应的差分方程为(4)FIR系统的基本结构有直接型、级联型、快速卷积型、频率取样型等。
FIR与IIR滤波器的比较与选择IIR滤波器可以用比FIR滤波器少的阶数来满足相同的技术指标,这样,IIR滤波器所用的存储单元和所用的运算次数都比FIR滤波器少。
SerDes知识详解一、SerDes的作用1.1并行总线接口在SerDes流行之前,芯片之间的互联通过系统同步或者源同步的并行接口传输数据,图1.1演示了系统和源同步并行接口。
随着接口频率的提高,在系统同步接口方式中,有几个因素限制了有效数据窗口宽度的继续增加。
➢时钟到达两个芯片的传播延时不相等(clock skew)➢并行数据各个bit的传播延时不相等(data skew)➢时钟的传播延时和数据的传播延时不一致(skew between data and clock)虽然可以通过在目的芯片(chip #2)内用PLL补偿时钟延时差(clock skew),但是PVT变化时,时钟延时的变化量和数据延时的变化量是不一样的。
这又进一步恶化了数据窗口。
源同步接口方式中,发送侧Tx把时钟伴随数据一起发送出去, 限制了clock skew对有效数据窗口的危害。
通常在发送侧芯片内部,源同步接口把时钟信号和数据信号作一样的处理,也就是让它和数据信号经过相同的路径,保持相同的延时。
这样PVT变化时,时钟和数据会朝着同一个方向增大或者减小相同的量,对skew最有利。
我们来做一些合理的典型假设,假设一个32bit数据的并行总线,a)发送端的数据skew = 50 ps ---很高的要求b)pcb走线引入的skew = 50ps ---很高的要求c)时钟的周期抖动jitter = +/-50 ps ---很高的要求d)接收端触发器采样窗口= 250 ps ---Xilinx V7高端器件的IO触发器可以大致估计出并行接口的最高时钟= 1/(50+50+100+250) = 2.2GHz (DDR)或者1.1GHz (SDR)。
利用源同步接口,数据的有效窗口可以提高很多。
通常频率都在1GHz以下。
在实际应用中可以见到如SPI4.2接口的时钟可以高达DDR 700MHz x 16bits位宽。
DDR Memory接口也算一种源同步接口,如DDR3在FPGA中可以做到大约800MHz的时钟。
数字时域均衡器设计摘要:本文介绍了数字时域均衡器的基本结构,以及LMS算法的基本原理,并对基于LMS 算法的自适应均衡器进行了Matlab仿真设计。
另外,通过改变其参数,对均衡器的收敛速度和性能进行了相关分析。
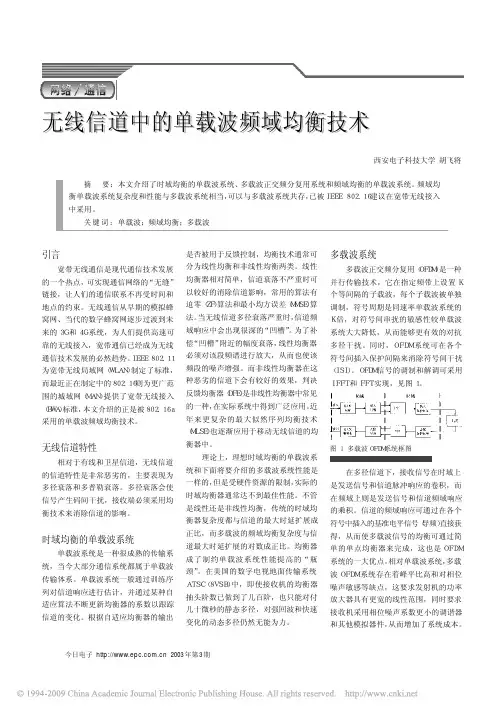
关键词:时域均衡器;LMS算法;Matlab仿真Abstract:This paper describes the basic structure of a digital time-domain equalizer and the basic principles of an LMS-algorithm. And the Matlab-simulation of the adaptive equalizer based on LMS algorithm is also carried out.In addition, by changing its parameters, I analyzed the equalizer convergence speed and performanceKey words:time-domain equalizer; LMS-algorithm; Matlab-simulation在数字通信系统中,信号的传输过程中存在信道带宽的限制和多径传播的影响,会产生码间干扰。
这时便需要均衡器来消除码间干扰,从而提高数据传输的可靠性,其机理是对信道或整个传输系统特性进行补偿,从而达到系统传输的要求。
然而随着现代通信技术的迅猛发展,人们对于通信系统速率和稳定性的要求的提高,再加上现实中信道特性是未知的,传统的均衡器已经无法满足系统的要求,必须使用能够实时快速跟踪信道变化、具有较强时变能力的均衡器,即自适应均衡器。
本文介绍的基于LMS算法的自适应均衡器,有着其独特的优点和广阔的应用前景。
一时域均衡器(一)均衡器介绍均衡器按研究的角度和领域,可分为频域均衡器和时域均衡器两大类。
频域均衡器是从校正系统的频率特性的角度出发,利用滤波器的频率特性去补偿系统的频率特性,使系统的总特性接近无失真传播条件;时域均衡器用来直接校正已失真的响应波形,使包括可调滤波器在内的整个系统的冲激响应满足无码间串扰条件。
其中时域均衡可以根据信道特性的变化进行自动调整,在数字传输系统中,尤其是高速数据传输中得以广泛应用。
另外,时域均衡器又分为线性均衡器和非线性均衡器,线性均衡器是指自适应均衡器的判决输出没有被用于均衡器的反馈逻辑中,不会反过来改变均衡器的参数;反之,就是非均线性均衡器。
(二)时域均衡器原理在信道传递有用信号之前需要对自适应时域均衡器进行训练。
在训练过程中,发射机会发射一组已知的固定长度的训练序列,接收机根据训练序列设定滤波器的参数,使检测误码率最小。
训练序列结束后,均衡器参数接近最佳值,该状态被称作均衡器的收敛。
在传递信号时均衡器还会不断随信道特性的变化对均衡器参数做出相应的改变。
一般,均衡器需要周期性地训练以保证一直有效地减小码间干扰。
下面先介绍时域均衡器的原理。
图1.2.1数字基带传输系统数字基带传输系统基本结构如图1.2.1所示,其系统特性为H ω =G T ω C ω G R ω 。
当H ω 不满足奈奎斯特第一准则时,输出信号波形便产生码间串扰。
理论上可以证明:如果在接收滤波器和抽样判决之间插入一个可调的横向滤波器,就可以使插入后的总系统特性满足奈奎斯特第一准则,该滤波器的其冲激响应为∑∞-∞=-=n SnT nT t C t h )()(δ其中ωωπωππd e nTH T T C s SST jn T T iSSSn ⎰∑-+=)(2上述ℎT t 就是下面图1.2.2所示网络的单位冲激响应。
该网络是有无限多的按横向排列的迟延单元T s 和抽头加权系数C n 组成的,其利用无限多个响应波形之和,将接收滤波器输出端抽样时刻上有码间串扰的响应波形转化成抽样时刻上无码间串扰的响应波形。
图1.2.2 无限长横向滤波器实际中,横向滤波器的抽头数不可能无限多。
又因为一个码元脉冲仅仅会对邻近的少数几个码元产生串扰,十几个抽头的滤波器就基本满足要求。
图1.1.3为有限长横向滤波器。
图1.2.3 有限长横向滤波器下面对该有限长横向滤波器进行分析,其冲激响应为∑-=-=NNi SiiT t C t e )()(δ设它的输入信号为)(t x ,则均衡后输出为∑-=-=*=NNi SiiT t x C t e t x t y )()()()(在抽样时刻S kT t =上,有∑-=-=NNi ik i k xC yy k k ≠0 表示波形失真引起的码间串扰。
当输入波形(t x 给定,即x k−i 确定时,通过调整C可以使某个的y k 等于零,但很难实现y k k ≠0 同时等于零。
这说明,利用有限长的横向滤波器可以减小码间串扰,但不能完全消除。
当C n 可调整时,此滤波器是通用的;并且当C n 可自动调整时,它能够适应信道特性的变化,动态地校正系统的码间串扰,接下来讨论基于LMS 算法的自适应均衡滤波器。
二LMS 算法LMS(Least mean square)算法,即最小均方误差算法于1960年由B.Widrow 和M.E. Hoff提出。
其采用梯度搜索法,收敛到最优解十分迅速,且原理简单,实施容易,目前广泛用于计算自适应滤波器的抽头增益系数。
通常,均衡器自适应过程可分为计算误差和根据误差两个过程。
(一)误差计算自适应滤波器结构如图2.1所示,如何产生输出信号y k 不再赘述。
输出信号y k 与期望信号d k 比较得到误差信号e k =d k −y k ,然后根据e k 并通过某种算法来控制、调整各个抽头系数W k 。
本文中,选取LMS 算法。
L图2.1 自适应横向滤波器的结构(二)LMS 原理在均衡器的实际工作中,希望误差e k 达到最小,从统计学的角度,就是希望e k 的均方误差E e k 2 =E d k −y k 2 越小越好。
即当均方误差达到最小值时,该滤波器性能达到最优。
将y k 表示成抽头权值输入向量X k 和抽头权值向量W k 内积的形式,然后代入上式中,可知E e k 2 是以W k 为多维自变量的函数,并存合适的抽头权值向量W k 使得均方误差E e k 2 存在最小值。
可以看出寻找E e k 2 最小值的过程即是寻找最优抽头权值向量W k 的过程。
下面通过梯度搜索法也即最陡下降法的思想寻找W k ,即这是一个迭代过程,可以由下式给出()k k k W W ∇-+=+μ1其中∇k =ðE e k 2 ðW k是该次迭代时的梯度向量,− ∇k 是该次迭代的方向向量,常数μ是迭代时所用的步长,又称作收敛因子。
在利用上述的最陡下降法计算∇k 时需要知道一些先验知识,而这在实际工作中是无法实现的,因此必须得到∇k 的估计值∇ k 。
在LMS 算法中,简单的取e k 2来代替均方误差E e k 2 ,可得到∇ k =ðe k 2ðWk =-2e k X k 进一步计算可得此时自适应算法,即LMS 自适应算法k k k k k k X e W W W μμ2ˆ1+=∇-=+经推导,要使LMS 算法收敛,μ的取值范围应为0<μ<2MP x 。
其中M 滤波器的长度,P x 为输入信号的功率。
由以上论述可以得出LMS 算法的具体步骤如下: a.初始化抽头系数矢量W k = 00⋯ T ,k =0; b. 循环以下步骤(1)计算滤波器输出y k =W k H X k , (2)计算误差函数e k =d k −y k ,(3)更新滤波器抽头系数矢量W k +1=W k +2μe k X k ;三LMS 自适应均衡器的Matlab 设计与仿真前面介绍了自适应均衡器的基本结构和LMS 算法的基本原理,下面在Matlab 中编写程序,对LMS 自适应均衡器进行仿真设计,并观察均衡器阶数N 和LMS 算法的步长因子μ改变时,均衡器收敛速度和收敛性能的变化。
本次仿真原始信号为s =sin πt 2 ,噪声为标准高斯白噪声,均衡器阶数N=128,步长μ=0.002。
仿真结果如图3.1所示。
图3.1 LMS 自适应均衡器输入、输出和均方误差曲线下面不改变原始信号s 和附加噪声,仅分别改变均衡器阶数N=36和步长因子μ=0.001,均衡器输出波形和均方误差曲线分别如图3.2中的(a )和(b )所示。
(a)(b)图3.2(a ) N=36和μ=0.001时,自适应均衡器输出及均方误差曲线四结论通过上述对LMS 自适应均衡器的仿真,可以看出均衡器阶数N 和算法步长μ对均衡器性能有如下影响: (1)阶数N在自适应均衡器的设计中,阶数N 的选取要根据实际仿真验证比较得出。
当阶数N 变大时,迭代次数增加,收敛速度也随之变快;但N 一定大时,收敛速度不再明显改变,且可能引起系数迭代过程不收敛。
(2)算法步长μμ的选取也要遵循一定的准则。
μ越小,收敛速度越慢,计算工作量越大,但滤波性能较好;反之,μ越大,收敛速度越快,计算工作量越小,但滤波性能较差。
且μ一定大时,收敛速度不再明显改变,也可能会造成计算溢出。
参考文献[1]黄埔堪,陈建文,楼生强.现代数字信号处理[M].北京:电子工业出版社,2003. [2]沈福民.自适应信号处理[M].西安:西安电子科技大学出版社,2001.[3]齐海兵.基于 FPGA 的横向 LMS 算法的实现[J].国外电子元器件,2007(1):31-34. [4]杜培宇.基于自适应滤波器的噪声抑制技术研究[D].硕士学位论文.山东:山东大学,2005.1002003004005006007008009001000-202信号s 时域波形ns020040060080010001200-505信号s 加噪声后的时域波形自适应滤波后的输出时域波形均方误差曲线02s20040060080010001200-505自适应滤波后的输出时域波形均方误差曲线附LMS自适应均衡器MATLAB仿真程序g = 100; % 统计仿真次数为gN = 1024; % 输入信号采样点数Nk = 128; % 时域抽头LMS算法滤波器阶数pp = zeros(g,N-k); % 将每次独立循环的误差结果存于矩阵pp中u = 0.002; %步长for q = 1:gt = 1:N;a = 1;s = sin(0.05*pi*t); % 输入单频信号sfigure(1);subplot(411)plot(t,real(s)); % 信号s 时域波形title('信号s时域波形');xlabel('n');ylabel('s');axis([0,N,-a-1,a+1]);xn = awgn(s,5); % 加入均值为零的高斯白噪声,信噪比为3dBy = zeros(1,N); % 设置初值输出信号yy(1:k) = xn(1:k); % 将输入信号xn的前k个值作为输出y的前k个值w = zeros(1,k); % 设置抽头加权初值e = zeros(1,N); % 误差信号for i = (k+1):N % 用LMS算法迭代滤波XN = xn((i-k+1):(i));y(i) = w*XN';e(i) = s(i)-y(i);w = w+u*e(i)*XN;endpp(q,:) = (e(k+1:N)).^2;endsubplot(412)plot(t,real(xn)); % 信号s 时域波形title('信号s加噪声后的时域波形');subplot(413)plot(t,real(y)); % 信号s 时域波形title('自适应滤波后的输出时域波形');for b = 1:N-kbi(b) = sum(pp(:,b))/g; % 求误差的统计平均endt = 1:N-k;subplot(414)plot(t,bi,'r');title('均方误差曲线');hold on % 将每次循环的图形显示结果保存下来。