CCP_协议
- 格式:pptx
- 大小:4.05 MB
- 文档页数:47
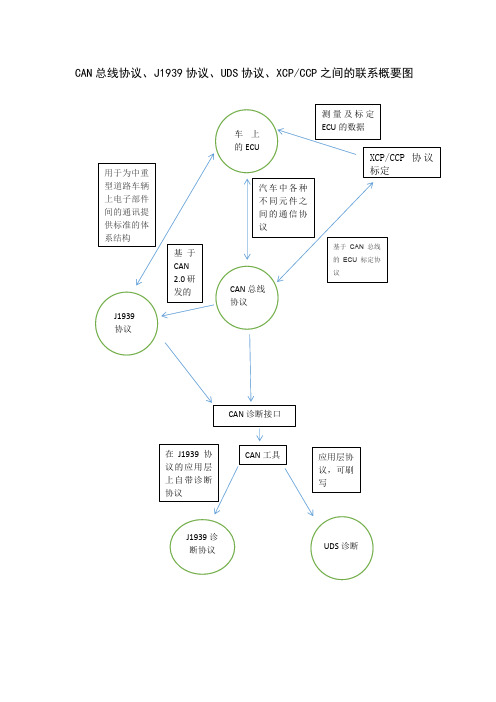
CAN总线协议、J1939协议、UDS协议、XCP/CCP之间的联系概要图CAN总线协议:是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。
CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。
该协议的健壮性使其用途延伸到其他自动化和工业应用。
CAN物理层的基础知识CAN总线在汽车的运用的实例图CAN总线的基本特点:(1)节点间采用多主通信方式。
(2)采用了短帧结构,报文帧有效字节数为8位,可以达到汽车实时响应的要求。
(3)报文ID值越小,优先级也高。
(4)非破坏性总线仲裁处理机制。
(5)可靠的CRC校验方式。
(6)自动重发的机制。
(7)在节点出现众多的错误时,会自动脱离总线的功能。
(8)CAN通讯距离最大是10公里(设速率为5Kbps),或最大通信速率为1Mbps(设通信距离为40米)。
(9)CAN总线上的节点数可达110个。
(10)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。
(11)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。
(12)总线状态总线有“显性”和“隐性”两个状态,“显性”对应逻辑“0”,“隐性”对应逻辑“1”。
“显性”状态和“隐性”状态与为“显性”状态,所以两个节点同时分别发送“0”和“1”时,总线上呈现“0”。
CAN总线采用二进制不归零(NRZ)编码方式,所以总线上不是“0”,就是“1”。
但是CAN协议并没有具体定义这两种状态的具体实现方式。
CAN的收发器CAN 收发器的输入信号和输出信号都是CANH-CANL的差分信号。
不归零(NRZ)编码方式填充位CAN的串行通信有异步和同步.同步串行通信是每个时钟沿采样数据的同步串行通信是每个时钟沿采样数据的,所以不会产生波特率误差产生的通讯误差。
位填充区域CAN节点的物理结构CAN链接层的基础知识CAN总线传输的报文有两种格式,分别是标准帧跟扩展帧,CAN报文有以下不同的帧类型:数据帧:帧起始(SOF):1bit ,显性信号,表示数据帧或者远程帧的开始。
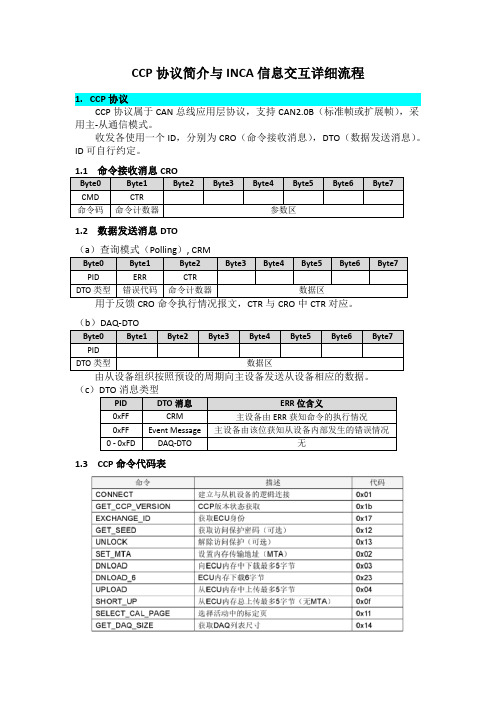
CCP协议简介与INCA信息交互详细流程P协议CCP协议属于CAN总线应用层协议,支持CAN2.0B(标准帧或扩展帧),采用主-从通信模式。
收发各使用一个ID,分别为CRO(命令接收消息),DTO(数据发送消息)。
ID可自行约定。
1.2数据发送消息DTO(c1.3CCP命令代码表P协议中Memory操作方法标定功能主要实现的目标:(1)修改RAM中数据(在线标定);(2)修改EEPROM中数据(外部EEPROM,16K)(3)修改Flash中数据(标定参数)2.1Flash标定流程(1)将标定数据保存在Flash中,存储地址0x00C20000 – 0x00C3FFFF。
(2)在程序初始化过程中,标定数据映射至RAM当中,程序从RAM中调取数据。
(3)标定过程开始时,在上位机中建立Flash存储区镜像,并保存至HEX文件。
(4)标定过程中,通过DNLOAD,DNLOAD_6等命令修改RAM中数据,实现在线标定,更新上位机Hex。
(5)标定结束后,将更新后的数据,一次性写入Flash。
(6)重启控制器,将新的标定数据映射值RAM中。
3.各操作具体流程命令接收消息CCP_CRO_ID: 0x100数据发送消息CCP_DTO_ID: 0x1013.1硬件初始化点击INCA中硬件初始化按钮,进行ECU初始化操作(1)联机(建立INCA与ECU的逻辑连接)无Seed&Key校验序号CMD 名称功能(2)将ECU Flash中数据映射到RAM中(3)INCA进行CHECKSUM操作计算ECU RAM中标定数据校验和,确认ECU与INCA中数据是否一致。
(4)选择当前标定页3.2存储页- DownLoad操作INCA存储页中DownLaod操作,数据流向:INCA : WP –> ECU: RAM序号CMD 名称功能INCA存储页中Copy操作,数据流向:INCA: RP –> INCA: WPECU: Flash –> ECU: RAMINCA存储页中Copy操作,数据流向:ECU: RAM –> INCA: WPECU: RAM –> INCA: RP序号CMD 名称功能3.5存储页– Flash Program 操作3.5.1仅标定数据刷写(Data)3.6实验环境– WP/RP 切换在INCA实验环境中实现对WP/RP的切换(1)PR -> WP序号CMD 名称功能(2)WR -> RP3.7实验环境–标定量/MAP数据更改在INCA实验环境中,WP操作模式下,进行标定量修改或者修改MAP数据。
基于CCP协议的电动汽车AMT标定方法【摘要】本文基于在线标定协议CCP(Can Calibration Protocol)设计并开发了应用于电动汽车自动变速器(AMT)控制单元(TCU)的整车控制在线标定系统。
通过该方法实时在线的快速标定整车控制参数、换档规律,以达到快速优化换挡品质、提升电动车整车动力性、经济性指标的目的。
【关键词】CCP协议;电动车;AMT;标定1引言电动汽车因具有低污染、低噪声、能量效率高、能量来源多样化的特点,使得开发以电动汽车为代表的各种新能源汽车,成为解决汽车带来的诸多问题的有效途径[1]。
自动变速技术在纯电动车辆中的引入,能够大幅提升汽车的动力性能,有效的增大系统的能源利用效率,从而提高对于纯电动汽车最为重要的续航能力。
作为电动汽车驱动技术的关键环节,自动变速系统控制器(TCU)控制参数的在线标定对整车性能将产生至关重要的影响[2]。
因此,开发符合纯电动车自动变速系统的标定系统,通过方便快捷的标定技术提升电动汽车的各项性能,对于电动车实现产业化发展具有重要的现实意义。
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
2 CCP协议及工作原理2.1 CCP通信方式基于CCP协议的ECU标定采用主-从通信方式。
主设备通过CAN总线与从设备相连,其中主设备是测量标定系统,从设备是需要标定的ECU。
根据CCP 协议,主设备首先与从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
2.2 CCP报文帧结构基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO和数据传输对象DTO。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识。
CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。

CCP 15协议综述Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10ECU2ECU3CANMaster CCP 和CCP 协议拓扑结构CCP :CAN Calibration Protocol 是基于CAN 总线应用层协议。
ECU1SlaveSlave标定工具SlaveECU4CCP16协议综述Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10CCP 报文CCP 报文有两个:CRO :Command Receive Object (Master Slave )DTO :Data Transmit Object (Slave Master )MasterMasterSlaveSlaveCRO CCP 报文DTO CCP 报文CCP 17Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10CCP 报文CCP 使用两条CAN 报文CRO: Command Receive Object 命令接收对象DTO: Data Transmission Object 数据传输对象报文ID 在ECU 描述文件(如A2L )中定义,CRO 高于DTO协议综述CCP 18Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10CCP 报文——CROCRO :Command Receive Object——从Master 到Slave协议综述Command Code TimeOut to ACK[ms]RemarkCONNECT0x0125GET_CCP_VERSION 0x1B 25EXCHANG_ID 0x1725SET_MTA 0x0225DNLOAD 0x0325UPLOAD 0x0425GET_DAQ_SIZE 0x1425SET_DAQ_PTR 0x1525WRITE_DAQ 0x1625START_STOP 0x0625DISCONNECT0x0725CCP29Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-1011个基本命令协议综述CommandCodeTimeOut to ACK[ms]RemarkGET_SEED 0X1225UNLOCK 0X1325DNLOAD_60X2325SHORT_UP0X0F 25SELECT_CAL_PAGE 0X1125GET_ACTIVE_CAL_PAGE 0X0925SET_S_STATUS 0X0C 25GET_S_STATUS 0X0D 25BUILD_CHKSUM 0X0E 30000CLEAR_MEMORY 0X1030000PROGRAM 0X18100PROGRAM_60X22100MOVE 0X1930000TEST0X0525DIAG_SERVICE0X20500ACTION_SERVICE 0X215000CCP30Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-1017个可选命令协议综述CCP 协议综述19CCP 报文——DTODTO :Data Transmit Object ——从Slave 到Master 根据PID (Packet ID )的不同,DTO 可分为:PID =255:Command Return Message ( CRM -DTO ,命令返回信息)主要是从设备反馈给主设备的响应PID =254:Event Message (事件信息)当从设备检测到内部发生错误机制时,由从设备自行向主设备发送,报告其当前的运行状态,并请求主设备暂停当前工作进程以处理发生的错误。

CPP协议最近学习CCP协议,总结了下:1、CCP协议概述CCP(CAN Calibration Protocol)是⼀种基于CAN总线的匹配标定协议。
ECU都需要经过匹配标定的过程,从⽽确定其运⾏参数和控制参数。
有时为了实现对ECU的精确控制以及参数匹配修改,满⾜预定的要求,必须对ECU进⾏精确的匹配标定以及优化各项控制参数。
基于此,ASAM⾃动化测试系统标准协会(Association for Standardization of Automation and Measuring Systems)制定了CCP协议。
更形象地说,CCP协议实现了ECU在运⾏过程中,内部变量的在线监测以及有需要时对某些变量的在线修改。
监测ECU的内部变量可以测试ECU 运⾏的正确性,若发现某个变量的值不是我们期望的,我们可以标定它,修改成期望的值。
举例来说,我们要监测ECU中发动机的转速,若发现发动机转速是错误的,不是我们所需要的,我们⽴即就可以修改它成正确的我们需要的转速。
2、CCP通信上⾯我们对CCP有了个总体的印象,对CCP能够做什么有了了解,下⾯我们关键的是要怎么实现它。
基于CCP协议的ECU标定采⽤主-从通信⽅式,主设备通过CAN总线与多个从设备相连。
其中主设备是测量标定系统MCS(Measurement Calibration System),从设备是需要标定的ECU。
在这⾥测量标定系统我介绍⼀下CANape。
CANape是⼀款ECU标定和测试⼯具。
与CCP协议相结合,能完成对ECU标定,同时还能在ECU运⾏期间直接访问内存并进⾏操作。
从上⾯的介绍,现在我们⼼中应该⾄少有这么⼀个框图(如下),通过CAN总线,CANape可以读出ECU中的变量,同时CANape也能写ECU中的变量。
3、CCP协议报⽂帧格式CCP属于CAN总线的应⽤层协议,它占⽤CAN报⽂两个ID标志符,即CRO(Command Receive Object)和DTO(Data Transmission Object),使⽤数据帧中数据场的8个字节。
CCP 协议CAN 标定协议内容1介绍1.1 尽快地1.2 CAN 标定协议 (CCP)2范围与应用领域3相关的文件4校订历史记录5定义与缩写6协议定义6.1 一般的控制命令6.2 数据获取命令7消息对象7.1 消息对象的组织7.2 消息对象的描述7.2.1命令接收对象CRO7.2.2数据传输对象DTO(从到主)7.3 数据获取的组织8版本机制9版本相容性10命令码的表11命令返回码的表12命令描述12.1 连接12.2 交换站监别12.3 获得传播密匙12.4 开启保护12.5 设置存储器传递位址12.6 数据下载12.7 数据下载 6 个字节12.8 数据上传12.9 短上传12.10 选择标定数据页12.11 获得 DAQ(获取 ECU数据 ) 列表12.12 设置 DAQ(获取 ECU数据 )列表指标12.13 写 DAQ(获取 ECU数据 ) 列表项目12.14 开始 /停止数据传输12.15 分离12.16 设置期间状态12.17 得到期间状态12.18 建立核对和12.19 清除存储器12.20 规划12.21 规划 6 个字节12.22 移动存储器区块12.23 诊断的服务12.24 行动服务12.25 测试可用率12.26 启动 /停止同步化语数据传送12.27 现在激活标定页12.28 实现 CCP 的版本13出错处理14例子顺序14.1 期间航行日志 - 在14.2 区块下载14.3 区块上传14.4 标定数据初始化14.5 DAQ( 获取 ECU数据 )列表初始化14.6 码更新15预期的作业等级16附录16.1 错误码的矩阵16.2 广播传送的应用技术1 介绍1.1 ASAPASAP特别工作小组 ( 出自 Applikati在s systemen的Arbeitskreis zur Standardisierung; 英国人翻译 :应用/标定系统任务动力的标准化)是被公司Audi AG , BMW1 AG,宾士汽车 - 宾士汽车 AG 发现 , 保时捷 AG 与大众汽车AG。
天津易博达动力科技有限公司 技术文档
1
天津易博达动力科技有限公司 技术文档
2
天津易博达动力科技有限公司 技术文档
3
天津易博达动力科技有限公司 技术文档
4
天津易博达动力科技有限公司 技术文档
5
天津易博达动力科技有限公司 技术文档
6
天津易博达动力科技有限公司 技术文档
7
天津易博达动力科技有限公司 技术文档
8
天津易博达动力科技有限公司 技术文档
9
天津易博达动力科技有限公司 技术文档
10
天津易博达动力科技有限公司 技术文档
11
天津易博达动力科技有限公司 技术文档
12
天津易博达动力科技有限公司 技术文档
13
天津易博达动力科技有限公司 技术文档
14
天津易博达动力科技有限公司 技术文档
15
天津易博达动力科技有限公司 技术文档
16
天津易博达动力科技有限公司 技术文档
17
天津易博达动力科技有限公司 技术文档
18
天津易博达动力科技有限公司 技术文档
19
天津易博达动力科技有限公司 技术文档
20