基于CCP协议利用CANape进行电控单元标定
- 格式:doc
- 大小:95.00 KB
- 文档页数:7
CAN!信标定协议(基于ccp协议)一、协议简介该通信协议采用主-从式通信方式,主设备通过CAN总线与多台从设备相连接,主设备是测量标定系统,从设备是需要标定的ECU,主设备首先与其中一个从设备建立逻辑链接,建立逻辑连接后,主、从设备之间所有的数据传递均由主机控制,从设备执行主设备命令后返回包含命令响应值或错误代码等信息的报文,同时从设备可以根据主设备通过控制命令所设置的列表信息,来定时地向主设备传送变量信息,数据的传递是由主设备初始化并且由从设备来执行的,并且是由固定的循环采样频率或者事件触发的。
主设备通过USB-CAN接口与从设备连接,符合CAN2.0协议。
通信过程中,所有报文均为8个字节,它可以包含命令、数据、数据长度、地址等信息。
该通信协议参照ccp协议,可以与INCA,CANape 等标定软件接口。
二、通信数据对象CAN通信采用了两个报文数据对象CRO(命令接收对象)和DTO(命令发送对象),每个对象根据其数据流向,都有一个唯一的ID标志符进行标识,ID标识符可以由用户自行设定。
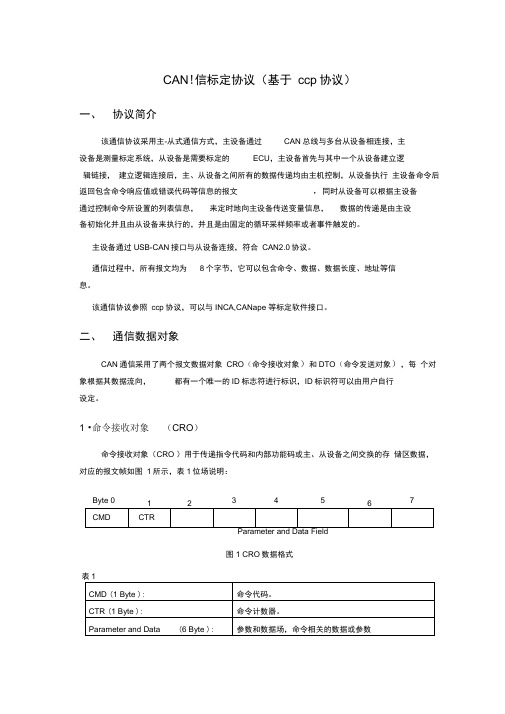
1 •命令接收对象(CRO)命令接收对象(CRO )用于传递指令代码和内部功能码或主、从设备之间交换的存储区数据,对应的报文帧如图1所示,表1位场说明:图1 CRO数据格式2 •数据传输对象(DTO)数据传输对象(DTO)指由从设备反馈的报文。
DTO根据报文首字节PID的值可以由三种形式,见表2 :(1). CRM 和Event Message 的报文帧如图2所示:3.协议命令列表及说明(标注绿色字体部分逐步补充完整)3.2命令返回错误代码3.3命令详细说明3.3.2 SET_MTA 命令:333 DNLOAD 命令:3.3.4 UPLOAD 命令:335 SHORT UPLOAD 命令:3.3.6 DISCONNECT 命令:337 GET_DAQ_SIZE 命令:3.3.8 SET_DAQ_PTR 命令:339 WTITE_DAQ 命令:3.3.10 START-STOP 命令:3.3.11 CLEAR_MEMORY 命令:数据传送对象(DTO)3.3.12 PROGRAM 命令:4、标定实现(举例)建立完善的匹配标定具体流程为:与底层ECU进行连接,监控、在线标定,上载和下载map图,断开连接等操作。

基于CCP协议利用CANape进行电控单元标定
丁圣彦;罗峰;孙泽昌
【期刊名称】《电子技术应用》
【年(卷),期】2005(31)12
【摘要】采用基于CAN总线的匹配标定协议,对汽车控制器局域网络中的电子控制单元进行匹配标定.分析了CCP协议用于标定的工作机理,讨论了利用CANape 进行基于CCP标定的实现方法,阐述了如何生成CANape与控制器底层程序的软件接口及具体标定流程.实际应用结果表明,这种方法可以快速有效地实现对汽车网络中各控制器的匹配标定.
【总页数】4页(P5-7,10)
【作者】丁圣彦;罗峰;孙泽昌
【作者单位】同济大学,汽车学院,上海,200092;同济大学,汽车学院,上海,200092;同济大学,汽车学院,上海,200092
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于CCP协议的电控单元标定系统通信模块 [J], 李高坚;袁观练;周洋;侯献军;邹斌
2.基于CCP协议的EPS电控单元CAN传输分析 [J], 刘威;邵文彬;廖武
3.基于CCP协议汽车电控单元标定系统的设计 [J], 张彧;冯辉宗;岑明;甘海云
4.基于CCP协议的发动机电控单元匹配标定 [J], 张成伟;龚元明
5.基于CCP的AMT电控单元标定系统开发 [J], 黄华;席军强;肖宽
因版权原因,仅展示原文概要,查看原文内容请购买。
目前基于CAN(Controller Area Network)总线的分布式系统在汽车电子领域得到广泛应用,电子控制单元的标定已成为汽车电子控制装置开发的一个重要环节。
CCP(CAN Calibra tion Protocol)是一种基于CAN总线的ECU(Electronic Control Unit)标定协议[1],已经在许多欧美汽车厂商得到应用,采用CCP协议可以快速而有效地实现对汽车电控单元的标定。
然而基于CCP协议的标定,需要在ECU内部实现支持CCP协议的驱动程序(CCP drive r)。
目前大多数应用都采用Vector提供的free CCP driver[2]。
考虑到ECU底层程序与C AN驱动程序的实现各不相同,将CCP驱动程序结合到ECU中[3]并不是一件一蹴而就的事,这需要对CCP协议本身、标定工具及标定工具与ECU之间的通信有详细和深入的了解。
在整个标定系统的开发过程中,大量时间被耗费在前期CCP驱动程序与ECU结合上。
本文在简单介绍CCP协议的基础上,提供了一个通用的ECU与CCP驱动程序结合的实例,以帮助缩短整个标定开发周期。
CANape[4]是一款ECU标定和测试工具。
与CCP协议相结合,不仅能完成对ECU的标定,同时还能在ECU运行期间直接访问内存并进行操作。
这使得CANape不仅是一款功能强大的标定工具,也是一款电控单元开发的得力助手。
然而在使用方面,CANape的前期配置比较繁琐,目前国内的相关资料较少。
本文将介绍CANape,并着眼于如何基于CCP协议使用CANape完成ECU的标定。
1 CCP协议及工作原理CCP协议是ASAP(Arbeitskreis zur Standardisierung von Applikationssystemen)标志的有机组成部分。
ASAP作为一个应用系统标准化工作小组,其目的在于提供通用软、硬件接口标准,以解决由于不同制造商提供的控制器存在的接口不匹配问题。

基于CCP协议的新能源汽车控制器标定系统研究摘要:随着新能源汽车的快速发展和普及,其核心部件之一——控制器的标定技术也越来越受到重视。
本文以基于CAN通信协议的新能源汽车为研究对象,针对其控制器标定问题,提出了一种基于CCP协议的控制器标定系统。
首先介绍了新能源汽车及其控制器的基本概念和相关技术,然后详细论述了CCP协议的原理、特点及其在新能源汽车控制器标定中的应用,接着阐述了新能源汽车控制器标定过程中的需求与挑战,并提出了相应解决方案。
最后,通过实验验证,证明该系统具有良好的控制精度和稳定性,同时也具备良好的实用性和拓展性。
关键词:新能源汽车,控制器,标定系统,CCP协议,控制精度一、引言新能源汽车作为21世纪的重要产业之一,受到了各国政府和企业的广泛关注。
其高效、清洁、环保的特点,符合可持续发展的要求,为人类社会的可持续发展做出了重要贡献。
其中,控制器作为新能源汽车的核心部件之一,其性能和可靠性对整个车辆的运行和使用安全至关重要。
控制器标定是保证控制器性能和可靠性的重要手段之一。
传统的控制器标定技术多采用人工调整方式,效率低、精度不高、周期长,难以适应新能源汽车控制器的快速发展和变化。
因此,研究基于CCP协议的新能源汽车控制器标定系统,成为当前亟待解决的问题之一。
二、新能源汽车及其控制器新能源汽车是指采用新能源(包括太阳能、风能、水能等)作为动力来源,以锂电池、超级电容、燃料电池等作为能量储存装置,运用电动机驱动车轮转动,实现汽车行驶的一种新型汽车。
控制器是新能源汽车的核心部件之一,主要功能是通过控制电机的转速和转矩,实现车辆的加速、制动和驱动等功能。
三、CCP协议原理及其应用CCP(CAN Calibration Protocol)协议是一种基于CAN通信协议的标定协议,主要用于控制器的标定和诊断。
其工作原理是通过CAN总线实现控制器与外部标定工具之间的通信,使标定工具能够读取和设置控制器内部的参数和调节值,从而实现控制器的标定。
基于CCP协议的电动汽车AMT标定方法【摘要】本文基于在线标定协议CCP(Can Calibration Protocol)设计并开发了应用于电动汽车自动变速器(AMT)控制单元(TCU)的整车控制在线标定系统。
通过该方法实时在线的快速标定整车控制参数、换档规律,以达到快速优化换挡品质、提升电动车整车动力性、经济性指标的目的。
【关键词】CCP协议;电动车;AMT;标定1引言电动汽车因具有低污染、低噪声、能量效率高、能量来源多样化的特点,使得开发以电动汽车为代表的各种新能源汽车,成为解决汽车带来的诸多问题的有效途径[1]。
自动变速技术在纯电动车辆中的引入,能够大幅提升汽车的动力性能,有效的增大系统的能源利用效率,从而提高对于纯电动汽车最为重要的续航能力。
作为电动汽车驱动技术的关键环节,自动变速系统控制器(TCU)控制参数的在线标定对整车性能将产生至关重要的影响[2]。
因此,开发符合纯电动车自动变速系统的标定系统,通过方便快捷的标定技术提升电动汽车的各项性能,对于电动车实现产业化发展具有重要的现实意义。
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
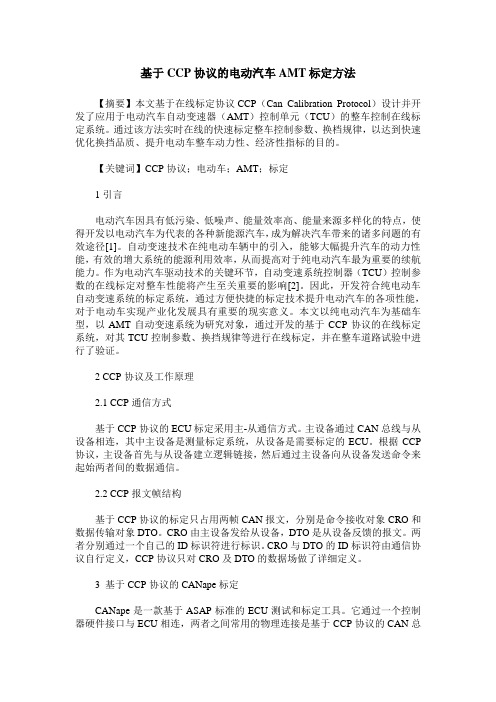
2 CCP协议及工作原理2.1 CCP通信方式基于CCP协议的ECU标定采用主-从通信方式。
主设备通过CAN总线与从设备相连,其中主设备是测量标定系统,从设备是需要标定的ECU。
根据CCP 协议,主设备首先与从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
2.2 CCP报文帧结构基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO和数据传输对象DTO。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识。
CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。

ccp协议代码竭诚为您提供优质文档/双击可除ccp协议代码篇一:基于ccp协议的汽车标定系统daq模式的实现基于ccp协议的汽车标定系统daq模式的实现20xx-12-2623:56:00来源:中国自动化网ccp协议是一种基于can总线的匹配标定协议。
该协议具有通信可靠、传输速度快、通用性好等特点。
本文讨论了一种基于ccp协议的汽车ecu标定系统,并详细介绍了该系统的工作原理、数据采集机制以及实现方式。
前言随着汽车电子技术的发展,电子控制单元(ecu)的标定已成为汽车电子控制装置开发的一个重要环节。
大多数ecu都需要经过匹配标定的过程,从而确定其运行参数和控制参数。
目前国内还没有成熟的基于ccp的ecu标定系统,已有的一些系统主要是采用Vector提供的freeccpdriver,或者基于matlab的相关工具包,在此基础上作自己的应用软件,并没有独立的ccp驱动;国外的产品功能强大,但价格昂贵。
因此,研究、掌握ccp的核心技术,开发针对不同用户需求提供不同的定制功能,并能适应pci、usb等不同主机接口的ecu标定软件就具有非常重要的意义。
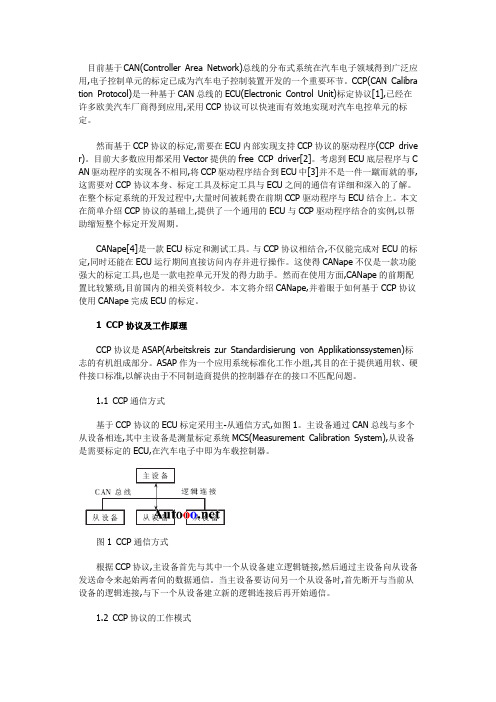
ccp协议简介ccp协议的通信方式基于ccp协议的ecu标定采用主-从通信方式,主设备通过can总线与多个从设备相连,如图1所示。
其中主设备测量标定系统mcs(measurementcalibrationsystem),从设备是需要标定的ecu。
根据ccp协议,主设备首先与其中一个从设备建立逻辑连接。
建立逻辑连接后,主、从机之间所有的数据传递均由主机控制,从机执行主机命令后返回包含命令响应值或错误代码等信息的报文。
任何一个从机都可以定时地根据由主机通过控制命令所设置的列表来传递内部的数据。
所以说数据的传递是由主机初始化,由从机来执行,并且是由固定的循环采样频率或事件触发的。
图1ccp通信结构图ccp协议定义了两种工作模式:一种是polling(查询)模式,另一种是daq(数据采集)模式。
基于CCP协议的电控发动机监控标定系统开发林志华;王东亮;王银辉;黄开胜【摘要】CCP协议是一种基于CAN总线的匹配标定协议,其可靠性和稳定性高,应用范围越来越广.通过采用Labview开发了基于CCP协议的上位机标定监控软件,利用CCP DRIVER实现了下位机与上位机的通讯,实现了数据上传和下载等相关功能.采用本标定系统进行的电控发动机监控标定试验表明该套系统实时性和可靠性好,能够满足发动机标定试验要求.【期刊名称】《汽车科技》【年(卷),期】2011(000)002【总页数】5页(P54-58)【关键词】CCP协议;CAN总线;发动机标定【作者】林志华;王东亮;王银辉;黄开胜【作者单位】清华大学,汽车工程系,北京,100084;清华大学,汽车工程系,北京,100084;陆军航空兵学院,直升机机载设备系,北京,101123;清华大学,汽车工程系,北京,100084;清华大学,汽车工程系,北京,100084【正文语种】中文【中图分类】TP393发动机标定系统是标定工程师根据发动机工况利用已有的控制算法通过修改控制参数和数据,使发动机满足规定性能要求的工具。
目前,基于CAN总线的标定系统已经成为主流。
CCP(CAN Calibration Protocol)是一种基于CAN总线的ECU 标定协议,采用CCP协议可以快速而有效地实现对汽车电控单元的标定。
在许多欧美汽车厂商中CCP协议得到了越来越广泛的应用,如ETAS公司的INCA数据采集标定系统以及VECTOR公司的CANape标定监控系统等,以上商业化软件价格高昂,为降低开发成本,自主开发基于CCP协议、可以针对德尔福等国外厂商提供的发动机管理系统进行标定的工具成为必需。
目前国内有的研究单位利用VECTOR公司的商业化标定软件CANape开发发动机标定系统[1],尚没有完全自主的基于CCP的标定监控系统。
本文采用Labview开发相应的上位机软件,使用Vector公司的free CCPDriver实现下位机的CCP功能,由此构成一套完整的基于CCP协议的发动机监控标定系统,实现了数据上传和下载等相关功能。
基于CCP协议的纯电动车整车控制器标定研究下载方式,详见文末本文中设计了基于控制器局域网标定协议(CAN calibration protocol,CCP)的纯电动车VCU标定系统,研究了核心控制策略,针对控制策略利用CAN总线快速传输数据的特性,对VCU进行有效的监控和标定,验证了VCU的各项性能。
1 CCP协议1.1 通信方式CCP是基于CAN的应用层协议,CAN总线通信速率最高为1 Mbps,且每帧报文可缓存8个字节数据,故通过CAN总线传输数据实时性好。
采用主从通信模式,上位机标定工具作为主设备,可以连接多个控制器从设备。
但任意时刻,只允许一个从设备与主设备进行通信,需要断开与当前控制器的连接,才能建立与其他控制器的通信。
基于该CCP协议可随机读取控制器中RAM和ROM数据,进行FLASH编程来测量和标定数据。
1.2 消息对象使用命令接收对象CRO(command receive object)和数据发送对象DTO(data transmit object)两条报文完成信息交互。
CRO 报文用于上位机向控制器传输命令,DTO报文用于控制器反馈给上位机应答数据。
控制器接收CRO后,会响应DTO报文。
根据ID不同可将DTO分为3类:ID=255的CRM(command return message)是 VCU反馈给上位机CRO命令的执行情况;ID=254是VCU检测到内部发生错误时,向上位机报告其运行状态,并请求暂停当前任务以处理错误;ID=0-253用在DAQ模式(data acquisition command)中,由从设备组织周期性向主设备发送。
1.3 工作模式CCP协议规定了查询(Polling)和数据获取(data acquisition,DAQ)命令两种工作模式。
Polling模式是上位机发送CRO命令,VCU接收该命令后再反馈,两者之间不断交互实现数据交换,实现简单、占用资源小,但效率较低。
目前基于CAN(Controller Area Network)总线的分布式系统在汽车电子领域得到广泛应用,电子控制单元的标定已成为汽车电子控制装置开发的一个重要环节。
CCP(CAN Calibra tion Protocol)是一种基于CAN总线的ECU(Electronic Control Unit)标定协议[1],已经在许多欧美汽车厂商得到应用,采用CCP协议可以快速而有效地实现对汽车电控单元的标定。
然而基于CCP协议的标定,需要在ECU内部实现支持CCP协议的驱动程序(CCP drive r)。
目前大多数应用都采用Vector提供的free CCP driver[2]。
考虑到ECU底层程序与C AN驱动程序的实现各不相同,将CCP驱动程序结合到ECU中[3]并不是一件一蹴而就的事,这需要对CCP协议本身、标定工具及标定工具与ECU之间的通信有详细和深入的了解。
在整个标定系统的开发过程中,大量时间被耗费在前期CCP驱动程序与ECU结合上。
本文在简单介绍CCP协议的基础上,提供了一个通用的ECU与CCP驱动程序结合的实例,以帮助缩短整个标定开发周期。
CANape[4]是一款ECU标定和测试工具。
与CCP协议相结合,不仅能完成对ECU的标定,同时还能在ECU运行期间直接访问内存并进行操作。
这使得CANape不仅是一款功能强大的标定工具,也是一款电控单元开发的得力助手。
然而在使用方面,CANape的前期配置比较繁琐,目前国内的相关资料较少。
本文将介绍CANape,并着眼于如何基于CCP协议使用CANape完成ECU的标定。
1 CCP协议及工作原理CCP协议是ASAP(Arbeitskreis zur Standardisierung von Applikationssystemen)标志的有机组成部分。
ASAP作为一个应用系统标准化工作小组,其目的在于提供通用软、硬件接口标准,以解决由于不同制造商提供的控制器存在的接口不匹配问题。
1.1 CCP通信方式基于CCP协议的ECU标定采用主-从通信方式,如图1。
主设备通过CAN总线与多个从设备相连,其中主设备是测量标定系统MCS(Measurement Calibration System),从设备是需要标定的ECU,在汽车电子中即为车载控制器。
图1 CCP通信方式根据CCP协议,主设备首先与其中一个从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
当主设备要访问另一个从设备时,首先断开与当前从设备的逻辑连接,与下一个从设备建立新的逻辑连接后再开始通信。
1.2 CCP协议的工作模式CCP定义了两种工作模式:Polling(查询)模式及DAQ(Data Acquisition Command)模式。
查询模式下,主设备与从设备间的每一次通信都由主设备发送命令来起始,从设备收到主设备的命令后,执行相应的操作并反馈一帧报文。
这种工作模式由于需要主机与从机之间进行“一问一答”的信息交互,工作效率不高,但实现简单,而且占用ECU内存资源较小。
DAQ模式使从设备可以脱离主设备的命令控制按一定周期自动向主设备上传数据。
DAQ 模式下,主设备首先发送一条请求DAQ的命令,从设备收到后,按命令中的参数自行配置并组织需要上传的数据,然后按一定周期自主向主设备上传数据。
这种模式由于不需要主机通过命令逐步控制,工作效率高,但实现较复杂,如果需要上传的数据量很大,会占用大量EC U内存空间。
1.3 CCP报文帧结构基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO(Command Re ceive Object)和数据传输对象DTO(Data Transmission Object),如图2所示。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识(CRO_ID与DTO_ID)。
图2 CCP协议主、从设备通信CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。
按照CCP协议,CRO数据场的第1个字节为命令代码CMD(Command Co de),CCP协议共规定了28条命令[1]。
从设备通过CMD代码判断主设备请求的是哪条命令。
数据场的第2个字节是命令计数器CTR(Command Counter)。
剩余6个字节均为命令参数,每条命令有各自对应的命令参数。
从设备反馈的报文称为DTO。
按CCP协议,DTO又细分为三类:·命令返回消息CRM(Command Return Message):由从设备发送,针对CRO的反馈报文。
·事件消息(Event Message):当从设备检测到内部发生错误机制时,由从设备自行向主设备发送,报告其当前的运行状态,并请求主设备暂停当前工作进程以处理发生的错误。
·DAQ-DTO(Data Acquisition-DTO):用在DAQ模式中,由从设备组织,定期向主设备发送。
DTO报文的第1个字节PID(Packet ID)定义了DTO的类型,255代表CRM, 254代表事件消息。
第2个字节为命令返回/错误代码ERR(Command Return-/Error Code)。
对于CRM,主设备由该字节获知命令的执行情况;对于事件消息,主设备由该位获知从设备内部发生了哪种错误。
第3字节CTR是命令计数器,该位数值与其对应的CRO的CTR值相对应。
剩余5个字节是数据场,存放主设备请求的数据或信息。
2 基于CCP协议的接口程序实现基于CCP协议进行标定,需要MCS与ECU的应用程序都能够支持CCP协议,这部分应用程序称为CCP driver。
本文采用Vector提供的free CCP driver[2]。
由于CCP协议基于CA N总线,因此CCP driver与ECU的结合主要分为与CAN driver及与其他应用程序两方面。
CCP driver与CAN driver的结合如图3,主要分为以下两方面:图3 CCP标定程序接口·发送端:DTO通过CAN driver的发送子函数以CAN报文的格式上传给MCS。
·接收端:主设备发送的命令以CAN报文的格式首先进入CAN driver的接收子函数,由其判断为CRO后,进一步交给命令处理器处理。
命令处理器作为CCP driver的一个主要组成部分,负责将接收到的CRO,通过其CRM代码进行命令解释,执行相应操作,组织反馈数据并调用CAN发送子函数。
DAQ处理器支持DA Q工作模式,当命令处理器判断收到的命令为DAQ请求后,进一步将数据传给DAQ处理器,由DAQ处理器组织数据并直接调用CAN 发送子函数,以DAQ-DTO的形式定期向主设备上传。
基于CCP协议的基本CAN通信流程如图4所示。
ECU接收到报文后,转入CAN接收子函数,在常规接收流程后,对报文的ID标识符进行判断,如为CRO_ID,则将CCP标志位(Ccp_i ndicator)置位。
由于采用中断方式接收报文,为了避免占用过多中断时间而影响其他函数或中断级别较低的程序运行,在对ID标识符进行判断后,并不直接在函数中调用CCP driver的命令处理器。
命令处理器的调用会在主函数中进行。
图4 接口程序基本流程图主函数通过判断标志位的状态,调用CCP driver的ccpCommand()子函数。
该函数是命令处理器的主要组成部分,也是命令处理器与CAN driver的接口函数,它负责解释并执行收到的CRO命令,调用CCP driver中的其他函数,进行数据处理并组织需要反馈的数据。
ccpCommand()通过调用CAN driver中的CCP发送子函数ccpSend()发送一帧DTO。
c cpSend()须在CAN driver中实现,由CCP driver调用。
按实际情况,将CAN发送子函数直接以ccpSend()的形式实现,或在保留原有发送子函数的基础上添加一个ccpSend()子函数,在其中调用CAN发送子函数,以完成DTO的发送。
CCP协议为确保主设备与ECU之间正常通信,每次发送后,程序必须通过调用CCP drive r中的ccpSendCallback()子函数检查刚才的DTO是否已经发送,否则不能发送下一帧报文。
针对不同的CAN driver实现,该函数调用的位置不同。
最后主函数将CCP标志位清空,等待下一条CRO命令。
一个完整的CCP driver 接口还包括与ECU其他应用程序的接口。
每次单片机初始化后,主函数调用一次CCP driver的CCP初始化子函数ccpInit(),将上次标定残留在ECU内存中的数据清空,为下次标定与测量做准备。
CCP协议共定义了28条命令,每条命令在CCP driver中都对应一组相应的子函数,代表不同的功能,如EEPROM标定、DAQ工作模式等。
用户可根据实际需要,选择实现其中部分或全部功能。
每增加一个新的功能,必须在底层程序中添加开放该项功能的程序接口[3]。
如对EEPROM标定,首先ECU应用程序中应包含EEPROM模块子函数,同时还需实现命令处理器与EEPROM模块之间的调用接口。
3 利用CANape实现基于CCP的标定CANape[4]是德国Vector公司出品的一款基于ASAP标准的ECU测试和标定工具。
它通过一个控制器硬件接口与ECU相连,两者之间常用的物理连接是基于CCP协议的CAN总线。
只有控制器的底层程序中有支持CCP协议的程序接口, CANape才能与控制器通信。
CANape提供了多种功能:在线数据评估、离线评估、数据管理、FLASH编程、参数标定及ASAP2数据编辑器等。
此外,测试过程中由CAN总线上传的数据还可以通过CANape 在计算机显示和保存,以进行离线标定和数据评估。
3.1 ASAP2控制器描述文件及ASAP2编辑器CANape与控制器间的通信需要一个描述文件支持,这个文件称为ASAP2控制器描述文件[4]。
CANape对控制器的参数标定和数据测量都是基于这个文件,该文件记录了控制器中各参数的详细信息,如标定参数和测量变量在控制器中的存储地址、存储结构、数据类型和转换公式等。
在CANape中,每个标定参数和测量数据都会有一个变量名,如发动机温度、冷却水温度。
当CANape需要访问某个变量,就在ASAP2描述文件中根据变量名,找到该变量在控制器中的存储地址、数据长度等信息,然后进行操作,如图5。
图5 ASAP2控制器描述文件为了方便用户对ASAP2文件进行维护和修改,CANape集成了一个ASAP2数据库编辑器,用以生成和修改ASAP2控制器描述文件。
所有的信息都能通过对话框的形式进行设置和修改。