基于CCP协议的电动汽车AMT标定方法
- 格式:doc
- 大小:25.00 KB
- 文档页数:3
基于CCP协议的电动汽车AMT标定方法【摘要】本文基于在线标定协议CCP(Can Calibration Protocol)设计并开发了应用于电动汽车自动变速器(AMT)控制单元(TCU)的整车控制在线标定系统。
通过该方法实时在线的快速标定整车控制参数、换档规律,以达到快速优化换挡品质、提升电动车整车动力性、经济性指标的目的。
【关键词】CCP协议;电动车;AMT;标定1引言电动汽车因具有低污染、低噪声、能量效率高、能量来源多样化的特点,使得开发以电动汽车为代表的各种新能源汽车,成为解决汽车带来的诸多问题的有效途径[1]。
自动变速技术在纯电动车辆中的引入,能够大幅提升汽车的动力性能,有效的增大系统的能源利用效率,从而提高对于纯电动汽车最为重要的续航能力。
作为电动汽车驱动技术的关键环节,自动变速系统控制器(TCU)控制参数的在线标定对整车性能将产生至关重要的影响[2]。
因此,开发符合纯电动车自动变速系统的标定系统,通过方便快捷的标定技术提升电动汽车的各项性能,对于电动车实现产业化发展具有重要的现实意义。
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
2 CCP协议及工作原理2.1 CCP通信方式基于CCP协议的ECU标定采用主-从通信方式。
主设备通过CAN总线与从设备相连,其中主设备是测量标定系统,从设备是需要标定的ECU。
根据CCP 协议,主设备首先与从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
2.2 CCP报文帧结构基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO和数据传输对象DTO。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识。
CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。

FRONTIER DISCUSSION | 前沿探讨基于CCP协议的自动驾驶控制器MCU固件标定系统设计和实现陈晓韦 张庆余 张苏林 靳志刚 李金亮中汽数据(天津)有限公司 天津市 300393摘 要: 本文以无人驾驶车辆为研究背景,研究基于CCP协议的自动驾驶控制器MCU固件标定系统的设计和实现。
整个系统包含以MCU为控制芯片的自动驾驶控制器、USBCAN数据采集卡、MCU固件标定上位机软件。
自动驾驶控制器借助事先约定好CCP协议完成一些参数的标定,切换一些复杂的自动驾驶控制逻辑和策略,同时借助事先存储在MCU内的BootLoader引导程序实现自动驾驶控制器APP程序的更新。
通过测试发现,此系统工作稳定,通讯数据完整可靠。
关键词:无人驾驶车辆 自动驾驶控制器 CCP协议 标定1 引言随着汽车电动化、智能化、网联化、共享化技术的发展,无人驾驶车辆应用而生,其主要依靠感知、定位、决策实现无人驾驶的目的。
目前无人驾驶车辆主要应用场景有货物运输,如无人驾驶配送车;载人运输,如无人驾驶通勤接驳车,无人驾驶网约车等;特殊场景应用如无人驾驶清洁消毒车等。
国内外越来越的专家学者投入到自动驾驶各个方向的研究,如吉林大学的高振海教授关于路径规划方面的研究[1],西南交通大学关于障碍物目标检测方面的研究[2]。
自动驾驶控制器是无人驾驶车辆内主要控制模块,是自动驾驶系统和车辆底盘进行数据交互的媒介,一方面将接收到的车辆底盘数据传输给自动驾驶系统,供自动驾驶系统对车辆的当前状态做出准确判断,另一方面将自动驾驶系统对车辆的横纵向控制参数和车身控制参数传递等决策信息传递给车辆。
随着自动驾驶系统关键技术的研究与进步,自动驾驶控制器的功能也会逐渐丰富,并且能够传输一些复杂的控制逻辑与策略,通过自动驾驶人机交互系统实现控制逻辑与策略的切换。
自动驾驶系统和自动驾驶控制器之间通信可以采用多种总线接口,如Flexray、LIN等,但是考虑到车辆底盘线控一般都是控制器局域网络CAN总线[3]是车辆内电控单元的主要连接方式,因此自动驾驶控制器和车辆之间通信接口选择了CAN总线。
基于CCP协议的混合动力整车控制器标定系统及其底层驱动的开发胡嘉;杨正林;张彤;罗刚;向玉德【摘要】为了实现混合动力汽车动力性、经济性、排放及辅助功能等的优化,采用Visual C++基于CCP2.1协议开发了混合动力整车控制器上位机标定系统,并编写了控制器的底层驱动,构建了整个混合动力汽车整车控制器的标定平台.采用本标定系统所进行的实车标定实验证明该标定系统有着良好的人机交互界面,实时性和可靠性均能达到要求,适合混合动力汽车整车标定实验.【期刊名称】《汽车科技》【年(卷),期】2010(000)004【总页数】4页(P67-70)【关键词】混合动力汽车;CCP;标定;混合动力整车控制器【作者】胡嘉;杨正林;张彤;罗刚;向玉德【作者单位】南京航空航天大学,南京,210016;上海华普汽车有限公司,上海,201501;南京航空航天大学,南京,210016;上海华普汽车有限公司,上海,201501;上海华普汽车有限公司,上海,201501;上海华普汽车有限公司,上海,201501【正文语种】中文【中图分类】TP36混合动力整车控制器(HCU)的标定是混合动力汽车控制系统开发的一个重要环节。
标定是指根据整车的各种性能要求,如动力性、经济性、排放及辅助功能等,来调整、优化和确定整车的运行及控制参数的控制算法。
由于标定系统不直接与HCU系统硬件交往,所以标定系统具有对各类系统的普遍适用性,因此,开发符合国际规范的HCU标定系统平台,可为HCU系统标定和测量提供统一工具,从而可节省大量人力、物力。
作者基于CCP2.1协议在整车控制器软件中集成了底层驱动,并开发上位机软件,对超级电容式混合动力汽车整车控制器的参数进行标定,以优化整车性能,达到调整车辆性能与控制策略的目的。
1 电容式混合动力汽车基本结构本文所研究的单轴并联式混合动力方案是一种前置前驱的轻度混合形式。
经过大量的方案选型和设计,集成发动机、ISG电机、超级电容和双离合器等部件。
收稿日期:2009-09-28;修回日期:2010-08-20 基金项目:国家“八六三”计划基金资助项目(2006AA11A1C1) 作者简介:王明文(1982—),男,硕士,主要研究方向为发动机电子控制技术;w angmingw en @ 。
基于CCP 协议的发动机标定系统开发王明文1,唐 岚2,甘海云3(1.黎明职业大学,福建泉州 362000;2.西华大学,四川成都 610039;3.中国汽车工程研究院有限公司,重庆 400039) 摘要:介绍了CCP 协议的基本原理、通信方式和工作方法,在此基础上开发了基于CCP 协议的发动机标定系统。
介绍了标定系统硬件和软件的组成,并分别在控制器和上位机实现了CCP 协议的通信。
本系统实现了数据的采集与显示、在线标定、数据的存储和读取等功能,具有通信可靠、传输速度快、通用性好等优点,还可以针对用户需求进行功能配置。
关键词:CCP 协议;CAN 总线;汽车发动机;电控单元;标定系统中图分类号:T K407.4 文献标志码:B 文章编号:1001-2222(2010)04-0028-04 标定系统为标定试验提供了一个可视化的平台,使标定人员能够在试验过程中对各种控制量实施控制,并随时观察控制量的值。
标定的工作内容是通过调整、优化控制参数使电控单元与被控系统相匹配,主要包括实时监测电控单元运行过程中的重要变量数据,在线修改电控单元存储器中的M AP 图、曲线及各参数,以及进行离线标定和数据处理等。
目前,传统的标定方式如基于SCI 串行通信方式的标定系统仍然在广泛使用,标定软件之间不具备通用性,造成资源浪费,增加了用户的负担。
为此,欧洲ASAP 组织推出了CCP 标定协议,CCP 协议为控制器标定系统的开发提供了一个标准平台,自1996年发布了实际应用的2.0版本以来,在欧美已被V EC TOR ,dsPACE ,ETAS 等大公司广泛接受并成为标准。
应用CCP 协议的标定工具可以在控制器运行过程中实现对控制器中数据及特性参数的动态标定,相对于传统的标定系统,具有稳定可靠、准确快速、成本低等优点[1-2]。
基于CCP的AMT电控单元标定系统开发
黄华;席军强;肖宽
【期刊名称】《微计算机信息》
【年(卷),期】2010(026)013
【摘要】为方便、快捷、稳定地对AMT电控系统进行标定,采用基于CCP协议的通讯标准,以某AMT系统为平台,开发了AMT电控系统标定仪.试验证明.所设计的标定仪能较好的实现预期功能且性能稳定.
【总页数】3页(P53-55)
【作者】黄华;席军强;肖宽
【作者单位】100081,北京,北京理工大学机械与车辆学院;100081,北京,北京理工大学机械与车辆学院;100081,北京,北京理工大学机械与车辆学院
【正文语种】中文
【中图分类】U463.212
【相关文献】
1.基于CCP协议的电控单元标定系统通信模块 [J], 李高坚;袁观练;周洋;侯献军;邹斌
2.基于CCP协议的电控发动机监控标定系统开发 [J], 林志华;王东亮;王银辉;黄开胜
3.基于CCP协议汽车电控单元标定系统的设计 [J], 张彧;冯辉宗;岑明;甘海云
4.基于CCP协议利用CANape进行电控单元标定 [J], 丁圣彦;罗峰;孙泽昌
5.基于CCP协议的发动机电控单元匹配标定 [J], 张成伟;龚元明
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CCP协议的电动汽车AMT标定方法
【摘要】本文基于在线标定协议CCP(Can Calibration Protocol)设计并开发了应用于电动汽车自动变速器(AMT)控制单元(TCU)的整车控制在线标定系统。
通过该方法实时在线的快速标定整车控制参数、换档规律,以达到快速优化换挡品质、提升电动车整车动力性、经济性指标的目的。
【关键词】CCP协议;电动车;AMT;标定
1引言
电动汽车因具有低污染、低噪声、能量效率高、能量来源多样化的特点,使得开发以电动汽车为代表的各种新能源汽车,成为解决汽车带来的诸多问题的有效途径[1]。
自动变速技术在纯电动车辆中的引入,能够大幅提升汽车的动力性能,有效的增大系统的能源利用效率,从而提高对于纯电动汽车最为重要的续航能力。
作为电动汽车驱动技术的关键环节,自动变速系统控制器(TCU)控制参数的在线标定对整车性能将产生至关重要的影响[2]。
因此,开发符合纯电动车自动变速系统的标定系统,通过方便快捷的标定技术提升电动汽车的各项性能,对于电动车实现产业化发展具有重要的现实意义。
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
2 CCP协议及工作原理
2.1 CCP通信方式
基于CCP协议的ECU标定采用主-从通信方式。
主设备通过CAN总线与从设备相连,其中主设备是测量标定系统,从设备是需要标定的ECU。
根据CCP 协议,主设备首先与从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
2.2 CCP报文帧结构
基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO和数据传输对象DTO。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识。
CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。
3 基于CCP协议的CANape标定
CANape是一款基于ASAP标准的ECU测试和标定工具。
它通过一个控制器硬件接口与ECU相连,两者之间常用的物理连接是基于CCP协议的CAN总
线[3]。
3.1 ASAP2控制器描述文件及ASAP2编辑器
CANape与控制器间的通信需要.a2l文件支持。
CANape对控制器的参数标定和数据测量都是基于这个文件,该文件记录了控制器中各参数的详细信息,如标定参数和测量变量在控制器中的存储地址、存储结构、数据类型和转换公式等。
在CANape中,每个标定参数和测量数据都会有一个变量名,如电机转速、档位位置、油门等。
当CANape需要访问某个变量,就在ASAP2描述文件中根据变量名,找到该变量在控制器中的存储地址、数据长度等信息,然后进行操作。
3.2 CANape使用配置
每个需要标定的TCU都要在CANape中进行配置。
CANape共定义了28条命令,用以实现不同的功能,在配置页面里均有复选框与其对应。
控制器的配置必须与CCP Driver在TCU底层程序的具体实现相匹配,只有对某个功能的程序接口已经开放,才能在CANape中选择使用该项功能。
3.3 CANape中的参数标定
当标定参数需要存放在FLASH或ROM中时,在TCU上电初始化后,程序首先将标定参数的初始值复制到RAM中,在CANape中该段用来存放标定参数的RAM称为Calibration RAM。
标定过程中,CANape修改Calibration RAM中的参数值。
标定全部结束后,再将该段RAM中的内容复制回FLASH或ROM 中。
当标定参数存放在EEPROM中,有两种标定方法。
第一种与上述方法相同,首先将标定参数复制到RAM中,标定结束后再将RAM中的数据覆盖到EEPROM。
此外,也可对EEPROM中的参数直接进行改写,实现这种方法需要对EEPROM进行频繁擦写操作,但不占用额外的RAM空间。
采用CANape进行基于CCP的匹配标定,实现了标定工具和内容的统一。
根据这种方法能够快速有效地进行TCU的匹配标定,在实际开发应用中取得了良好的效果。
3.4整车标定试验验证
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
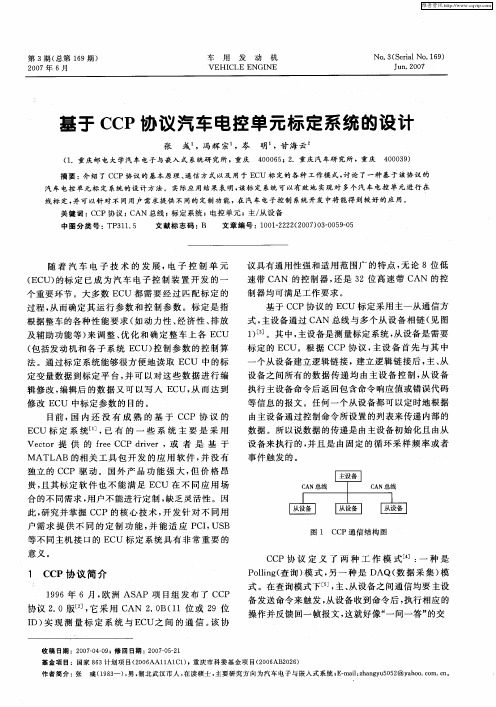
为进一步提高该车的换挡品质,需要对电机降扭、摘挡、调速、挂挡、恢复扭矩过程中的大量参数进行标定。
图1和图2分别为本标定系统针对换挡过程中摘挡前电机降扭时间进行的标定前后的换挡过程曲线,由图1和图2的对比可知,降扭时间标为30ms时,换挡有顿挫感,换挡不够平顺;降扭时间标为60ms时,换挡品质良好,且主观评价较好。
通过
标定试验,验证了本标定系统可靠性好,标定效率较高。
4.结论
在线标定是电控机械式自动变速器式电动车开发过程比较关键的一项技术。
本文基于CCP协议开发完成的TCU标定系统,经过多次实车调试,此系统运行稳定可靠,能够对TCU 进行在线标定,满足实车控制参数的快速匹配和优化,从而快速提升整车性能。
标定工程师可以根据研发工程师提供的标定手册针对不同实车进行出厂参数标定,因此具有较好的开发应用前景。
参考文献:
[1]杨华,孙振东,刘光玉.纯电动汽车关键技术研究[J].北京汽车,2007,(6).
[2]丁圣彦,罗峰,孙泽昌.基于CCP协议利用CANape进行电控单元标定[J].电子技术应用,2005,12:5-7.
[3]赵子亮,李俊,刘明辉,刘吉顺.并联混合动力客车控制参数标定系统开发[C].2010中国汽车工程学会年会论文集SAE-C2010P179,2010.。