形位公差详解
- 格式:pps
- 大小:1.37 MB
- 文档页数:47
加工后的零件不仅有尺寸公差,构成零件几何特征的点、线、面的实际形状与理想几何体规定的形状不可避免地存在差异,这种形状上的差异就是形状误差,而零件表面的实际位置对其理想位置所允许的变动量,称为位置误差。
形状和位置公差统称为形位公差。
2、形位公差的标注符号无无○无无有或无有或无∥有有有◎有有有有3、形位公差注意事项形位公差带一般解释:某个特性(表面、轴、点、线等)的形位公差是定义为一个区域,这个特性的所有点都包含在这个区域内。
按照该特性的给定公差和它的维数特征,其公差区域是下面中的一个:◆圆内区域◆两同心圆之间的区域◆两平行直线间的区域◆两等距线之间的区域◆两平行平面间的区域◆两等距面间的区域◆圆柱内区域◆两同轴圆柱之间的区域◆平行六面体之间的区域对于位置公差,必须定义一个基准用于决定公差区域的准确位置。
基准是一个理论上确切的几何特性(像轴、平面、直线等),可以基于一个或者几个基准特性。
除非有更加严格的限制,公差特性可以是公差区域内的任意形状、位置和方向等。
公差的数值t用于线性测量时以相同的单位给出。
如果没有特殊说明,作用于被标注公差特性的整个范围。
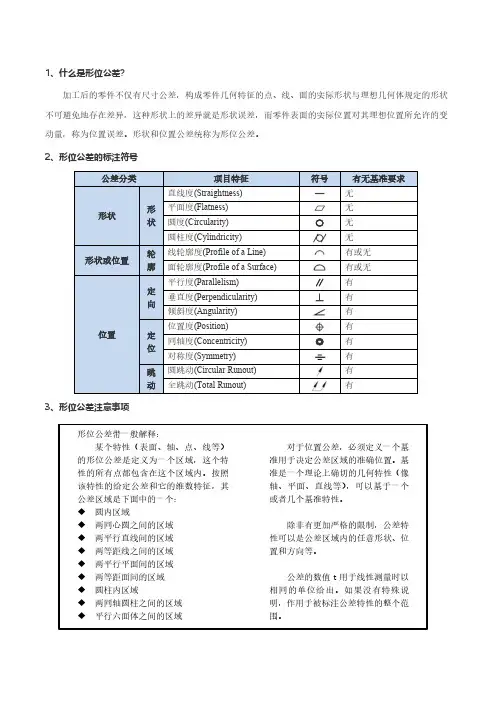
定义:定义:直线度Straightness 公差带是距离为公差值t 的两平行直线之间的区域。
如在公差值前加注φ,则公差带是直径为t 的圆柱面的区域被测表面的要素,必须位于平行于图样所示投影面且距离为公差值0.1的两平行直线内。
被测圆柱体内的轴线必须位于直径为φ0.08的圆柱面内。
平面度 Flatness 公差带是距离为公差值t 的两平行平面之间的区域。
被测表面必须位于距离为公差值0.08的两平行平面内。
圆度Circularity被测圆柱面任一正截面的圆周必须位于半径差为公差值0.03的两同心圆之间。
被测圆锥面任一正截面上的圆周必须位于半径差为公差值0.1的两同心圆之间。
圆柱度 Cylindricity 公差带是半径差为公差值t 的两同轴圆柱面之间的区域。
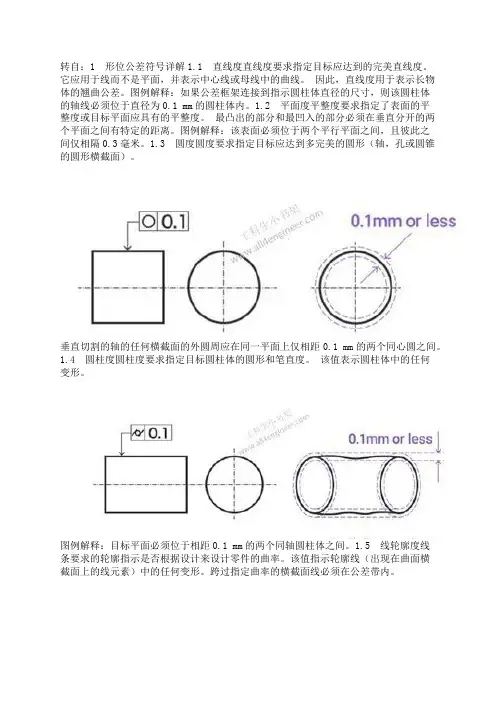
转自:1 形位公差符号详解1.1 直线度直线度要求指定目标应达到的完美直线度。
它应用于线而不是平面,并表示中心线或母线中的曲线。
因此,直线度用于表示长物体的翘曲公差。
图例解释:如果公差框架连接到指示圆柱体直径的尺寸,则该圆柱体的轴线必须位于直径为0.1 mm的圆柱体内。
1.2 平面度平整度要求指定了表面的平整度或目标平面应具有的平整度。
最凸出的部分和最凹入的部分必须在垂直分开的两个平面之间有特定的距离。
图例解释:该表面必须位于两个平行平面之间,且彼此之间仅相隔0.3毫米。
1.3 圆度圆度要求指定目标应达到多完美的圆形(轴,孔或圆锥的圆形横截面)。
垂直切割的轴的任何横截面的外圆周应在同一平面上仅相距0.1 mm的两个同心圆之间。
1.4 圆柱度圆柱度要求指定目标圆柱体的圆形和笔直度。
该值表示圆柱体中的任何变形。
图例解释:目标平面必须位于相距0.1 mm的两个同轴圆柱体之间。
1.5 线轮廓度线条要求的轮廓指示是否根据设计来设计零件的曲率。
该值指示轮廓线(出现在曲面横截面上的线元素)中的任何变形。
跨过指定曲率的横截面线必须在公差带内。
图例解释:在平行于投影平面的任何横截面上,目标轮廓必须位于两个包络之间,该两个包络由直径为0.03 mm的圆和理论上精确轮廓的直线上的中心为中心。
1.6 面轮廓度平面要求的轮廓指示是否根据设计来设计零件的曲率(表面)。
与直线的轮廓公差不同,平面的轮廓公差涉及整个指定的曲率。
图例解释:目标平面必须位于两个直径为0.1 mm的球体所形成的包络平面之间,并且该平面的中心具有理论上精确的轮廓。
1.7 平行度虽然它看起来与平面度相似,但平行度涉及一个基准(参考平面或基准线)。
平行度要求指定两条线或平面平行。
图例解释:指示箭头指示的平面必须平行于基准平面A,并且在指示箭头方向上仅相距0.05 mm的两个平面之间。
1.8 垂直度垂直度要求指定目标与基准(参考平面或直线)垂直度的精度。
替度,而是使用毫米作为垂直度指示值的单位。

形位公差符号及标注含义一、形位公差零件加工时,不仅会产生尺寸误差,还会产生形状和位置误差。
零件表面的实际形状对其理想形状所允许的变动量,称为形状误差。
零件表面的实际位置对其理想位置所允许的变动量,称为位置误差。
形状和位置公差简称形位公差。
二、形位公差符号三形状公差3.1 直线度(-)——直线度公差是实际直线对理想直线的允许变动量,限制了加工面或线在某个方向上的偏差,如果直线度超差有可能导致该工件安装时无法准确装入工艺文件规定的位置。
标注含义:被测表面投影后为一接近直线的“波浪线”(如下图),该“波浪线”的变化范围应该在距离为公差值t(t=0.1)的两平行直线之间。
3.2 平面度——平面度表示面的平整程度,指测量平面具有的宏观凹凸高度相对理想平面的偏差,一般来讲,有平面度要求的就不必有直线度要求了,因为平面度包括了面上各个方向的直线度。
标注含义:被测加工表面必须位于距离为公差值t(t=0.01)的两平行平面内,如下图区域。
3.3 圆度(○)——是指工件横截面接近理论圆的程度,工件加工后的投影圆应在圆度要求的公差范围之内。
标注含义:被测圆柱面的任意截面的圆周必须位于半径差为公差值t (t=0.025)的两同心圆之内,如右图区域。
3.4圆柱度()——是限制实际圆柱面对理想圆柱面变动量的一项指标。
它控制了圆柱体横截面和轴截面内的各项形状误差,如圆度、素线直线度、轴线直线度等。
圆柱度是圆柱体各项形状误差的综合指标。
标注含义:被测圆柱面必须位于半径差为公差值t(t=0.1)的两同轴圆柱面之间,如图。
●圆柱度和圆度的区别:圆柱度是相对于整个圆柱面而言的,圆度是相对于圆柱面截面的单个圆而言的,圆柱度包括圆度,控制好了圆柱度也就能保证圆度,但反过来不行。
●圆柱度和圆度的作用:柴油机的结构中有多处规定了圆柱度和圆度,如发动机的活塞环,控制好活塞环的圆度可保证其密封性,而活塞的圆柱度则对于其在缸套中上下运动的顺畅性至关重要。

形位公差详解以及标注方法形位公差是指在测量和工程设计中,用来描述和控制零件形状和尺寸的一种数学概念。
形位公差旨在通过规定允许的变动范围,使得零件在实际装配和使用中能够满足设计要求,并确保部件之间的相互关系良好。
形位公差的标注方法可以分为三个步骤:确定基准,标注正确的公差尺寸,标注相应的形位公差符号。
第一步,确定基准:基准是指被测量零件所依赖的参照物,它决定了形位公差的计算和标注方法。
在标准中,基准一般分为二类:完全基准和局部基准。
完全基准是指一个部件所依赖的基准平面、轴线或者点,局部基准是指其他部件的外表面、轴线或者点。
第二步,标注正确的公差尺寸:通过测量,确定被测量零件的尺寸后,需要用公差值来限制其尺寸变化范围,通常以正负公差值表示。
公差分为线性公差和角度公差。
线性公差用于度量线性尺寸的变动范围,而角度公差用于度量角度的变动范围。
在标注公差尺寸时,需要遵循标准的规定,按照大小顺序依次标注。
第三步,标注相应的形位公差符号:形位公差的符号用来表示被测量零件与基准之间的相对位置关系。
常用的形位公差符号有:平面度符号(⌾)、直线度符号(↔)、圆度符号(○)、轴向符号(↑↓)、倾斜度符号(∟)等。
这些符号需要标注在公差尺寸之上,并按照标准规定的位置和顺序进行标注。
形位公差的详细解释如下:1.平面度公差:用来描述一个零件的平面与参照平面之间的相对位置关系。
平面度公差可以分为平面度和平面度偏差。
平面度是指一个零件表面上的点的离散度,平面度偏差是指该点的实际位置与基准平面之间的最大距离。
2.直线度公差:用来描述直线零件的直线形状与参照直线之间的相对位置关系。
直线度公差可以分为直线度和直线度偏差。
直线度是指一个零件上直线形状的离散度,直线度偏差是指该直线的实际位置与基准直线之间的最大距离。
3.圆度公差:用来描述一个零件的曲面形状与参照圆之间的相对位置关系。
圆度公差可以分为圆度和圆度偏差。
圆度是指一个零件上曲面形状的离散度,圆度偏差是指该曲面的实际位置与基准圆之间的最大距离。
William Liu Nov.2005形位公差概述1、定义形位公差:是表示零件的形状和其相互间位置的精度要求。
2、形状和位置公差的分类形位公差:☹形状公差:A:直线度;B:平面度;C:圆度;D:圆柱度;E:线轮廓度;F:面轮廓度。
☹位置公差:A:定向公差:a:平行度;b:垂直度c:倾斜度。
B:定位公差:a:同轴度;b:位置度;c:对称度。
C:跳动:a:圆跳动;b:全跳动。
1形狀公差•形状公差的特点:可将其分成两组•1、直线度、平面度、园度、圆柱度:•特点:都是单一要素;没有基准;公差带位置是浮动的;•公差带方向为形位误差安最小区域法所形成的•方向一致。
•2、线轮廓度、面轮廓度:•特点:•1)、当线、面轮廓度是用来控制形状时,它是单一要素,•没有基准,公差带位置是浮动的。
•2)、当线、面轮廓度是用来控制形状和位置时,它是关•联要素,有基准,公差带位置是固定的。
•3)、当线轮廓度是封闭形状时,它是单一要素,没有基准•,公差带位置是固定的。
直線度公差1、定义:直线度是用来限制被测实际直线形状误差的一项指标。
2、平面上的直线度公差带是夹在距离为公差值的两条理想的平行线之间的区域。
0.01f=0.01空間直線度公差3、空间的直线度公差带:是直径为公差值Ф0.04mm的圆柱面内区域。
Ø0.04Ø0.04平面差公差1、定义:平面度是用来限制实际平面形状误差的一项指标。
0.012、平面度公差带:是距离为公差值0.01mm的两平行平面间的区域。
圓度公差0.05f =0.052、公差带是半径差为公差值0.05mm 的两同心园之间区域。
1、定义:圓度是限制回转体的正截面或过球心的任意截面轮廓圓形状误差的一项指标。
圓柱度公差1、定义:圆柱度是综合限制圆柱体正截面和纵截面的圆柱形状误差的一项指标。
0.052、圆柱度公差带:是半径差为公差值0.05mm 的两同轴圆柱面之间区域。
1、定义:是限制平面曲线形状误差的一项指标。
William Liu Nov.2005形位公差概述1、定义形位公差:是表示零件的形状和其相互间位置的精度要求。
2、形状和位置公差的分类形位公差:☹形状公差:A:直线度;B:平面度;C:圆度;D:圆柱度;E:线轮廓度;F:面轮廓度。
☹位置公差:A:定向公差:a:平行度;b:垂直度c:倾斜度。
B:定位公差:a:同轴度;b:位置度;c:对称度。
C:跳动:a:圆跳动;b:全跳动。
1形狀公差•形状公差的特点:可将其分成两组•1、直线度、平面度、园度、圆柱度:•特点:都是单一要素;没有基准;公差带位置是浮动的;•公差带方向为形位误差安最小区域法所形成的•方向一致。
•2、线轮廓度、面轮廓度:•特点:•1)、当线、面轮廓度是用来控制形状时,它是单一要素,•没有基准,公差带位置是浮动的。
•2)、当线、面轮廓度是用来控制形状和位置时,它是关•联要素,有基准,公差带位置是固定的。
•3)、当线轮廓度是封闭形状时,它是单一要素,没有基准•,公差带位置是固定的。
直線度公差1、定义:直线度是用来限制被测实际直线形状误差的一项指标。
2、平面上的直线度公差带是夹在距离为公差值的两条理想的平行线之间的区域。
0.01f=0.01空間直線度公差3、空间的直线度公差带:是直径为公差值Ф0.04mm的圆柱面内区域。
Ø0.04Ø0.04平面差公差1、定义:平面度是用来限制实际平面形状误差的一项指标。
0.012、平面度公差带:是距离为公差值0.01mm的两平行平面间的区域。
圓度公差0.05f =0.052、公差带是半径差为公差值0.05mm 的两同心园之间区域。
1、定义:圓度是限制回转体的正截面或过球心的任意截面轮廓圓形状误差的一项指标。
圓柱度公差1、定义:圆柱度是综合限制圆柱体正截面和纵截面的圆柱形状误差的一项指标。
0.052、圆柱度公差带:是半径差为公差值0.05mm 的两同轴圆柱面之间区域。
1、定义:是限制平面曲线形状误差的一项指标。
0.04f=0.042、其公差带是包络一系列直径为公差值0.04mm的园的两包络线之间的区域。
且圆心在理想轮廓线上。
1、定义:面轮廓度是限制空间曲面轮廓形状的一项指标。
0.04f=0.042、其公差带是包络一系列直径为公差值0.04mm,的球的两包络面之间的区域,且球心在理想轮廓面上。
線,面輪廓度的基準要求⏹线轮廓度和面轮廓度有两种情况:无基准要求的和有基准要求的。
故其公差带有大小和形状要求外,位置可能固定,也可能浮动。
⏹无基准要求时,理想轮廓线(面)用尺寸并加注公差来控制,这时理想轮廓线(面)的位置是不定的(形状公差),有基准要求的理想轮廓线(面)用理论正确尺寸并加注基准来控制,这时理想轮廓线(面)的位置是唯一的,不能移动。
(位置公差)位置公差•位置公差的分类、特点:•1、定向公差:平行度、垂直度、倾斜度•特点:都是关联要素,有基准,公差带位置都是浮动的,方向都为框格指引线所指的方向。
•2、定位公差:同轴度、对称度、位置度•特点:都是关联要素,有基准,公差带位置都是固定的,方向都为框格指引线所指的方向。
•3、跳动:园跳动、全跳动。
•特点:都是关联要素,有基准,公差带位置都是固定的,方向都为框格指引线所指的方向。
A0.01A1、定义:平行度是限制实际要素对基准在平行方向上的变动量的一项指标。
2、其公差带为距离为公差值0.01mm,且平行于基准A的两平行平面间区域。
Af=0.011、定义:垂直度是限制实际要素对基准在垂直方向上变动量的一项指标。
Ø0.01AA2、垂直度的公差带是直径等于公差值ø0.01mm,且于基准垂直的圆柱体内的区域。
0.02A A1、定义:倾斜度是限制实际要素对基准在倾斜方向上变动量的一项指标。
2、公差带是距离为公差值0.02mm的两平行平面之间区域,且平行平面与基准成理论正确角度。
0.02Ø0.04Ø0.01AA 1、定义:同轴度是限制被测轴线偏离基准轴线的一项指标。
2、同轴度公差带是直径为公差值ø0.01mm ,且与基准轴线同轴的圆柱面内区域。
0.01AA基准轴线辅助平面1、定义:对称度是限制被测中心要素偏离基准中心要素的一项指标。
2、对称度的公差带是距离为公差值0.01mm,且相对基准轴线对称配置的两平行平面之间的区域。
Ø0.01A B C 4-øA B C 1、定义:位置度是限制被测点线面的实际位置对其理想位置变动量的一项指标。
2、线的位置度公差带是直径为公差值ø0.01mm ,且以线的理想位置为轴线的圆柱面内的区域。
CBØ0.01A0.050.05AA 1、定义:徑向圓跳动是限制指定测量面内被测要素轮廓圓的跳动的一项指标。
2、是在垂直于基准轴线的任一测量平面内,半径差为公差值0.05mm ,且圆心在基准轴线上的两个同心圓之间的区域。
端面圆跳动公差带是在与基准轴线同轴的任一直径的测量圆柱面上,沿母线方向宽度为公差值t的圆柱面区域。
如图所示。
当零件绕基准轴线作无轴向移动回转时,左端面上任一测量直径处的轴向跳动量均不得大于公差值0.05mm 。
斜向圆跳动公差带是在与基准主轴线同轴的任一测量圆锥面上,沿母线方向宽度为公差值t的圆锥面区域。
如图所示,除特殊规定外,其测量方向是被测面的法线方向。
1、定义:徑向全跳动是限制整个被测表面跳动的一项指标。
2、公差带是半径差为公差值0.05mm ,且于基准轴线同轴的两圆柱面之间的区域。
径向全跳动是被测圆柱面的圆柱度误差和同轴度误差的综合反映。
基准A-B A-B0.05øøA B⏹端面全跳动的公差带是距离为公差值t,且与基准轴线垂直的两平行平面之间的区域。
⏹如图所示:⏹端面绕基准轴线作无轴向移动的连续回转,同时,指示表作垂直于基准轴线的直线移动,在整个测量过程,指示表的最大读数差不得大于公差值0.05mm。
形位公差的項目及符號以公差框格的形式标注(两格或多格)0.05 A公差特征符号公差值基准指引线(从表4-1中选) (以mm为单位) (由基准字母表示) (指向被测要素)注意:①公差值如果公差带为圆形或圆柱形,公差值前加注Ø,如果是球形,加注SØ。
②基准单一基准用大写表示;公共基准由横线隔开的两个大写字母表示;如果是多基准,则按基准的优先次序从左到右分别置于各格。
③指引线用细实线表示。
从框格的左端或右端垂直引出,指向被测要素。
指引线的方向必须是公差带的宽度方向。
重要提示:①指引线指向被测要素时,要注意区分轮廓要素和中心要素。
②基准符号用带小圆的大写字母以细实线与粗的短实线相连,基准要素也要注意区分轮廓要素和中心要素。
測量基準尺寸•測量位置度時必須使用圖中的基準尺寸來進行計算.•測量位置度,其被測量元素必須有參照物(即測量基準).•測量基準尺寸不是一個測量值,它是一個定義被測量元素的理論位置的.•測量基準尺寸通常不用定義其公差值.測量中一般取位置公差的1/2作為基準尺寸的公差.定位孔用來作為導光柱孔的X,Y方向的測量基準.腰形孔中心與導柱中心連線定義測量的Y軸.被測量位置度的導光柱孔BA28.16oø0.2A-B Aø0.2A-B A1.4119.7111.546.92ø0.2公差區域以基位A,B孔連線建成Y軸,并將A孔圓心定義為坐標原點.以A點為原點,使Y軸反時針方向旋轉28.16°,并設定為新的Y軸.如何測量位置度(1 of 5 pages)1:2:坐標點point A11.546.92ø0.2OK基準A如何測量位置度(2 of 5 pages)實際的幾何中心ø0.2Not OK如何測量位置度(3 of 5 pages)11.546.92基準A實際的幾何中心如何計算測量後其位置度公差的結果:AB目標位置實際位置=位置度如何測量位置度(4 of 5 pages)11.546.92基準A實際的幾何位置如何計算測量後其位置度公差的結果ABB =6.97-6.92=0.05A=11.54-11.50=0.04CC =SQRT((A=0.04)^2+(B=0.05)^2)=0.064=GD=C*2=0.064*2=0.1280.128<0.2= OK11.50=實際的測量結果6.97=實際的測量結果如何測量位置度(5 of 5 pages)如何用Werth自動影像測量儀計算位置度以基位A,B孔連線建成Y軸,并將A孔圓心定義為坐標原點.以A點為原點,使Y軸反時針方向旋轉28.16°,并設定為新的Y軸.1:2:坐標點point A按圖紙將被測孔的實際幾何中心測量.以手動輸入的方式將被測孔的理論位置作出來(即在以理論的坐標作圓).3:4:基準A實際的幾何中心理論圓(心)位置如何用Werth 自動影像測量儀計算位置度如何用Werth 自動影像測量儀計算位置度下圖是Werth自動影像測量儀手動員測圓的步驟手動輸入\理論位置如何用Werth自動影像測量儀計算位置度用位置度指令進行公差計算即可.3:計算所得的位置度值注意:在進行手動輸入理論位置時,要檢查其坐標原點是否正确,如被測量元素的測量基準不是坐標原點,則需要進行相應的換算.如何用自動影像測量儀VMS02計算位置度其坐標的建立方式同上.1:計算步驟如下(進行此步之前,必須設定基測量基準為原點):2:必須填寫計算後的公差值測量中如需自動輸出其測量的公差值,則在上圖中必須填寫公差的允收值,再按正的Report 輸出方式直行設定.在Reprt 輸出中會同時輸出X,Y 方向的理論值及實際測量值.3:公差的允收值1:為了更直接地反映其被測元素的真實位置,要求在記錄報告時,同時記錄其X,Y 方向的實際測量值(并在尺寸標準欄中記錄其X,Y 方向的理論值).X 10.00Y15.00ø0.21Nominal Dimension+Tol -Tol C1-2c1-1No.Loc 9.9515.059.9715.030.0840.141對于Nokia 的產品,不要求在MR 測量過程中記錄其位置度的計算值;但在CPK 測量中(一般為40shots 或80shots 產品),要求直接記錄(輸出)其位置度的最終計算值.2:★: 要特別注意在VMS02測量中,其位置度公差的輸出設定及輸出後應該記錄的數據.1:對稱度的定義:对称度是限制被测中心要素偏离基准中心要素的一项指标.0.15A10.0A30.0CDACD =對稱度△d 實際中心位0.15A10.0A30.01:常用對稱度的測量方法:A.先測量基準A 并將其定義為X 方向的0點;B.再分別測量被測量兩邊在X 方向的值d1,d2;C.其對稱度值即為d1與d2之間的差值.設定為X 方向的原點d1d1=I d1-d2 lA30.0在實際作業中,Nokia的圖紙標注會如下圖所示:因此其填寫方式相應的變得讓人容易理解.X10.00.15XOrigin30.0X對稱度的報表記錄:2:對Nokia 產品要求按下圖方式記錄(其對稱度值可不進行計算):X-X+ 4.955.010.061:通常情況,只要求直接記錄其對稱度的數值.Nominal Dimension+Tol -Tol C1-2c1-1No.Loc 0.151Nominal Dimension +Tol-TolC1-2c1-1No.Loc 0.151 4.955.01X--15X+150.06線輪廓度按被測量元素的形狀分三類:A1.被測量元素為直線:0.20A33.5033.56線輪廓度=2 * ABS(36.56-36.50)=0.12 < 0.20 OK被測線的實際位置2.被測量元素為圓:線輪廓度=2*(SQRT((33.57-33.50)^2+(25.65-22.60)^2)+ABS △∮/2)= xxx (< 0.20) OK(Not OK)被測線的實際位置33.5022.6033.5722.65其線廓度由以下兩部份構成:A. 圓中心的位置偏差其計算方式同位置度一樣.B. 圓半徑的差值AB0.20A B3.被測量元素為圓弧:線輪廓度=2*(SQRT((33.57-33.50)^2+(25.65-22.60)^2)+ABS △R/2)= xxx (< 0.20) OK(Not OK)被測線的實際位置33.5022.6033.5722.65其線廓度由以下兩部份構成:A. 圓弧中心的位置偏差其計算方式同位置度一樣.B. 圓弧半徑的差值0.20A BAB。