状态空间搜索解读
- 格式:ppt
- 大小:4.64 MB
- 文档页数:81
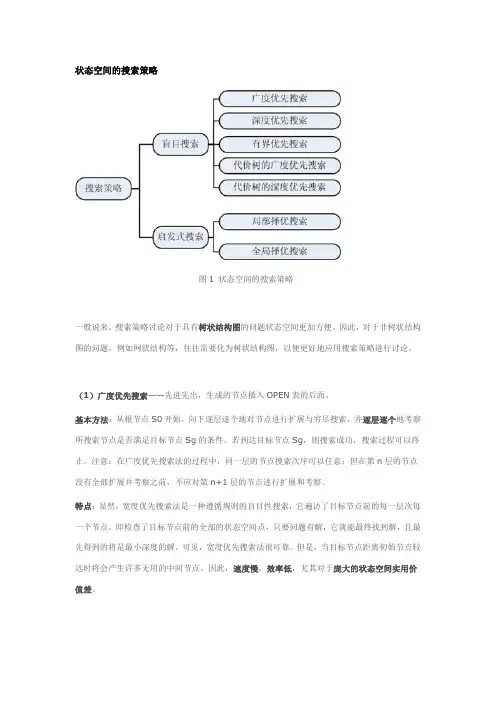
状态空间的搜索策略图1 状态空间的搜索策略一般说来,搜索策略讨论对于具有树状结构图的问题状态空间更加方便。
因此,对于非树状结构图的问题,例如网状结构等,往往需要化为树状结构图,以便更好地应用搜索策略进行讨论。
(1)广度优先搜索——先进先出,生成的节点插入OPEN表的后面。
基本方法:从根节点S0开始,向下逐层逐个地对节点进行扩展与穷尽搜索,并逐层逐个地考察所搜索节点是否满足目标节点Sg的条件。
若到达目标节点Sg,则搜索成功,搜索过程可以终止。
注意:在广度优先搜索法的过程中,同一层的节点搜索次序可以任意;但在第n层的节点没有全部扩展并考察之前,不应对第n+1层的节点进行扩展和考察。
特点:显然,宽度优先搜索法是一种遵循规则的盲目性搜索,它遍访了目标节点前的每一层次每一个节点,即检查了目标节点前的全部的状态空间点,只要问题有解,它就能最终找到解,且最先得到的将是最小深度的解。
可见,宽度优先搜索法很可靠。
但是,当目标节点距离初始节点较远时将会产生许多无用的中间节点。
因此,速度慢,效率低,尤其对于庞大的状态空间实用价值差。
(2)深度优先搜索——后进先出,生成的节点插入OPEN表的前面。
基本方法:从根节点S0开始,始终沿着纵深方向搜索,总是在其后继子节点中选择一节点来考察。
若到达目标节点Sg,则搜索成功;若不是目标节点,则再在该节点的后继子节点中选一考察,一直如此向下搜索,直到搜索找到目标节点才停下来。
若到达某个子节点时,发现该节点既不是目标节点又不能继续扩展,就选择其兄弟节点再进行考察。
依此类推,直到找到目标节点或全部节点考察完毕,搜索过程才可以终止或结束。
特点:方式灵活,规则易于实现,对于有限状态空间并有解时,必能找到解。
例如,当搜索到某个分支时,若目标节点恰好在此分支上,则可较快地得到解。
故在一定条件下,可实现较高求解效率。
但是,在深度优先搜索中,一旦搜索进入某个分支,就将沿着该分支一直向下搜索。
这时,如果目标节点不在此分支上,而该分支又是一个无穷分支,则就不可能得到解。

一、实验目的1. 理解状态空间搜索的基本概念和原理。
2. 掌握状态空间搜索方法在解决问题中的应用。
3. 比较不同搜索算法的优缺点,提高搜索效率。
二、实验内容本次实验主要涉及以下内容:1. 状态空间搜索的基本概念和原理。
2. 常用搜索算法:深度优先搜索(DFS)、广度优先搜索(BFS)、A搜索算法。
3. 状态空间搜索在解决实际问题时(如八数码问题、十五数码难题)的应用。
三、实验步骤1. 理解状态空间搜索的基本概念和原理。
状态空间搜索是一种求解问题的方法,将问题求解过程表示为从初始状态到目标状态的搜索过程。
状态空间搜索主要包括以下几个步骤:(1)确定问题的初始状态;(2)确定问题的目标状态;(3)定义状态空间,包括所有可能的状态和状态之间的转换关系;(4)确定搜索策略,选择合适的搜索算法。
2. 学习并实现常用搜索算法。
(1)深度优先搜索(DFS):按照一定的顺序前查找完一个分支,再查找另一个分支,直至找到目标状态。
(2)广度优先搜索(BFS):从初始状态一层一层向下搜索,直至找到目标状态。
(3)A搜索算法:结合启发式信息和代价函数,在搜索过程中优先考虑估计距离目标状态较近的状态。
3. 应用状态空间搜索解决实际问题。
以八数码问题为例,实现以下步骤:(1)定义问题状态:将8个数码排成一行,空白格用0表示。
(2)确定操作符集合:包括上下左右四个方向移动空白格。
(3)建立状态空间:根据初始状态,通过操作符集合生成所有可能的状态。
(4)选择搜索算法:实现DFS、BFS和A搜索算法,分别求解八数码问题。
4. 比较不同搜索算法的优缺点。
通过实验结果,分析DFS、BFS和A搜索算法在解决八数码问题时的搜索效率、空间复杂度和时间复杂度。
四、实验结果与分析1. 八数码问题的初始状态和目标状态如下:初始状态:1 2 3 4 5 6 7 8 0目标状态:0 1 2 3 4 5 6 7 82. 实验结果如下:(1)深度优先搜索(DFS):- 找到目标状态的搜索路径:10步- 空间复杂度:递归调用栈的深度,约为8层- 时间复杂度:由于DFS搜索过程可能遍历大量无效路径,因此时间复杂度较高(2)广度优先搜索(BFS):- 找到目标状态的搜索路径:31步- 空间复杂度:队列的长度,约为31层- 时间复杂度:BFS搜索过程较为平稳,时间复杂度相对较低(3)A搜索算法:- 找到目标状态的搜索路径:15步- 空间复杂度:约为15层- 时间复杂度:由于A搜索算法结合了启发式信息,因此时间复杂度相对较低3. 分析:(1)DFS搜索过程可能遍历大量无效路径,导致搜索效率较低。