第9章-状态空间分析法讲解学习
- 格式:ppt
- 大小:1.70 MB
- 文档页数:117
第9章 线性系统的状态空间分析与综合•重点与难点—、基本概念1. 线性系统的状态空间描述 (1)状态空间概念 状态反映系统运动状况,并可用以确定系统未来行为的信息集合。
状态变量确定系统状态的一组独立(数目最少)变量,它对于确定系统的运动状态是必需的,也是充分的。
状态向量 以状态变量为元素构成的向量。
状态空间 以状态变量为坐标所张成的空间。
系统某时刻的状态可用状态空间上的点来表示。
状态方程状态变量的一阶导数与状态变量、输入变量之间的数学关系,一般是 关于系统的一阶微分(或差分)方程组。
输出方程输出变量与状态变量、输入变量之间的数学关系。
状态方程与输出方程合称为状态空间描述或状态空间表达式。
线性定常系统状态空 间表达式一般用矩阵形式表示:x y(2) 状态空间表达式的建立。
系统状态空间表达式可以由系统微分方程、 传递函数等其他形式的数学模型导出。
(3) 状态空间表达式的线性变换及规范化。
描述某一系统的状态变量个数(维数) 是确定的,但状态变量的选择并不唯一。
某一状态向量经任意满秩线性变换后,仍可作 为状态向量来描述系统。
状态变量选择不同,状态空间表达式形式也不一样。
利用线性 变换的目的在于使系统矩阵 A 规范化,以便于揭示系统特性,利于分析计算。
满秩线性 变换不改变系统的固有特性。
根据矩阵A 的特征根及相应的独立特征向量情况,可将矩阵 A 化为三种规范形式:对角形、约当形和模式矩阵。
(4) 线性定常系统状态方程解。
状态转移矩阵BuDu(9.1)Ax Cx 结构图、(t )(即矩阵指数e At )及其性质:x(k) 1UkT ))Dkk)G(T)u(k)(9.8)i . (0) Iii . (t) A (t) (t)Aiii . (t 1 t 2 ) (t 1 ) ( t 2) (t 2)(t 1)iv. 1(t) ( t) v.[(t)]k(kt)vi. exp(At) exp(Bt) exp[( A B)t] (AB Bvii .exp(P 1APt) P 1exo( At)P (P 非奇异) 求状态转移矩阵 (t)的常用方法:拉氏变换法(t) L[(slA)1]级数展开法At ,", 1 A 2 2 1"k,k e IAt A tA t k!齐次状态方程求解x(t) (t)x(0)非齐次状态方程式(9.1)求解tx(t) (t)x(0)0 (t )Bu( )d(5) 传递函数矩阵及其实现传递函数矩阵G(s):输出向量拉氏变换式与输入向量拉氏变换式之间的传递关系1G(s) C(sl A) 1B D(9.6)传递函数矩阵的实现:已知传递函数矩阵 G(s),找一个系统{代B,C, D }使式(9.6) 成立,则将系统{A, B,C,D }称为G(s)的一个实现。
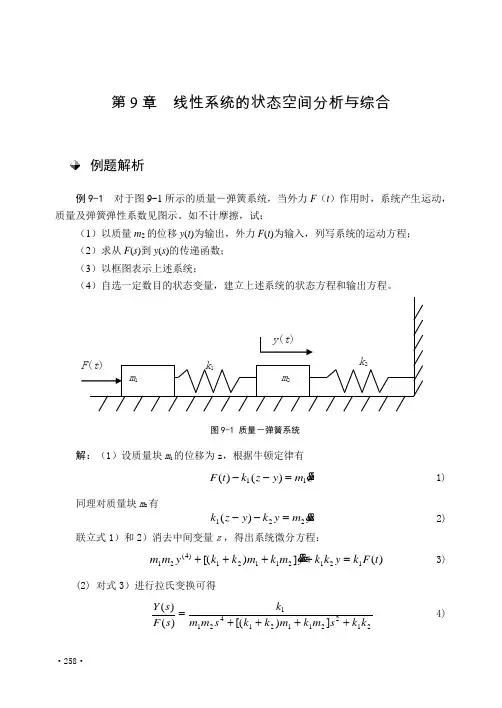
·258·第9章 线性系统的状态空间分析与综合例题解析例9-1 对于图9-1所示的质量-弹簧系统,当外力F (t )作用时,系统产生运动,质量及弹簧弹性系数见图示。
如不计摩擦,试:(1)以质量m 2的位移y (t )为输出,外力F (t )为输入,列写系统的运动方程; (2)求从F (s )到y (s )的传递函数; (3)以框图表示上述系统;(4)自选一定数目的状态变量,建立上述系统的状态方程和输出方程。
图9-1 质量-弹簧系统解:(1)设质量块m 1的位移为z ,根据牛顿定律有zm y z k t F 11)()(=-- 1) 同理对质量块m 2有y m y k y z k 221)(=-- 2) 联立式1)和2)消去中间变量z,得出系统微分方程: )(])[(12121121)4(21t F k y k k ym k m k k ym m =++++ 3) (2) 对式3)进行拉氏变换可得212211214211])[()()(k k s m k m k k s m m k s F s Y ++++=4)·259·(3) 对式(1)进行拉氏变换可得 121`11)()()(k s m s F s Y k s Z +=+ 5) 同样处理式2)有21221)()(k k s m k s Z s Y ++=6) 由式5),式6)可以画出系统结构图,如图9-2所示。
图9-2 系统结构图(4)设状态变量z x xz x ===211y x xy x ===433 由式1) x m k zx 112-== 11311)(m t F x m k ++ 由式2) 12132214x m kx m k k yx ++-== 因此有)(0010001000000011221221111t F m x m k k m k m k mk x⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+--= []x y 0100=·260·例9-2 在图9-3所示系统中,若选取x 1,x 2 ,x 3作为状态变量,试列写其状态空间表达式,并写成矩阵形式.图9-3解: 由结构图可得⎪⎪⎩⎪⎪⎨⎧==+=-+=-11313221)1()(2)3()2x y sx x x s s x x x s x u (整理可得系统状态空间方程表达式⎪⎪⎪⎩⎪⎪⎪⎨⎧=-=+--==132.321.23.132232x y x x x u x x x x x写成矩阵的形式[]x y u x x 001020320032100=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=例9-3 设系统微分方程为u u u y y yy 1588147++=+++ 系统初始条件为零,试:(1)采用传递函数直接分解法,建立系统的状态空间表达式,并画出状态图; (2)采用传递函数并联分解法,建立系统的状态空间表达式,并画出状态图。
状态空间分析法一、内容概要《状态空间分析法》是一篇介绍状态空间理论及其应用的分析文章。
本文首先简要概述状态空间分析法的概念及其相关领域的研究背景。
接着阐述状态空间分析法的理论基础,包括其基本原理、数学工具以及相关技术的理论基础。
然后介绍状态空间分析法在不同领域中的应用实例,包括物理系统、控制系统、信号处理、通信系统等领域的应用情况。
文章还将探讨状态空间分析法的优势与局限性,以及未来可能的发展方向和潜在应用。
对全文进行总结,强调状态空间分析法在科学研究、工程实践等领域的重要性和价值。
1. 介绍状态空间分析法的概念及其在工程、科学、经济等领域的应用状态空间分析法是一种强大的数学工具,广泛应用于工程、科学和经济等多个领域。
本文将详细介绍状态空间分析法的概念及其在各个领域的应用。
状态空间分析法是一种以系统状态为研究对象的数学分析方法。
它以系统的状态变量为核心,通过对状态变量的描述和分析,揭示系统的行为模式和内在规律。
状态空间分析法通过构建状态空间模型,将复杂的系统问题转化为数学模型,便于进行理论分析和数值计算。
在状态空间中,系统的状态可以通过一系列的状态变量来描述,这些状态变量随时间变化,反映了系统的动态行为。
工程领域:在控制工程、信号处理等领域中,状态空间分析法被广泛应用于分析和设计动态系统。
通过构建系统的状态空间模型,可以方便地分析系统的稳定性、响应特性和控制性能。
此外状态空间分析法还可以用于故障诊断和系统识别等领域。
科学领域:在物理学、生物学和医学等自然科学领域,状态空间分析法同样发挥着重要作用。
例如在量子力学和电路分析中,系统的状态可以通过状态空间模型来描述,从而揭示系统的内在规律和特性。
此外在生物医学信号处理中,状态空间分析法也被广泛应用于生物电信号的分析和处理。
经济领域:在经济和金融领域,状态空间分析法被用于分析和预测经济系统的动态行为。
通过构建经济模型的状态空间表示,可以分析经济增长、市场波动和金融风险等问题,为经济决策提供支持。