第八章控制系统的状态空间分析与综合
- 格式:doc
- 大小:2.18 MB
- 文档页数:24
②南航《820⾃动控制原理》、《920⾃动控制原理(专业学位)》考试⼤纲820⾃动控制原理考试⼤纲920⾃动控制原理(专业学位)考试⼤纲《⾃动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第⼀章-⾃动控制的⼀般概念:控制系统的⼀般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作⽤;对控制系统的基本要求。
第⼆章-控制系统的数学模型:控制系统动态微分⽅程的列写;⽤拉普拉斯变换求解线性微分⽅程的零初态响应与零输⼊响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应⽤。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;⼀阶系统、⼆阶系统的阶跃响应,典型⽋阻尼⼆阶系统动态性能指标的计算;输⼊引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输⼊作⽤下,不同类型系统的稳态误差;扰动引起的误差的定义与计算⽅法;减⼩稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相⾓条件;根轨迹绘制的基本法则;⼴义根轨迹;主导极点与偶极⼦的概念及其应⽤。
第五章-线性系统的频域分析法:频率特性的概念及其图⽰法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最⼩相⾓系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正⽹络的设计;串联迟后校正⽹络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分⽅程的概念;差分⽅程的求取与求解;⾹农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-⾮线性控制系统分析知识点:⾮线性控制系统概述;常见⾮线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;⽤描述函数法判断⾮线性系统稳定性;⾃激振荡的判断、⾃振参数的确定。
第8章控制系统的状态空间分析与综合第1~7章涉及的内容属于经典控制理论的范畴,系统的数学模型是线性定常微分方程和传递函数,主要的分析与综合方法是时域法、根轨迹法和频域法。
经典控制理论通常用于单输入-单输出线性定常系统,其缺点是只能反映输入-输出间的外部特性,难以揭示系统内部的结构和运行状态,不能有效处理多输入-多输出系统、非线性系统、时变系统等复杂系统的控制问题。
随着科学技术的发展,对控制系统速度、精度、适应能力的要求越来越高,经典控制理论已不能满足要求。
1960年前后,在航天技术和计算机技术的推动下,现代控制理论开始发展,一个重要的标志就是美国学者卡尔曼引入了状态空间的概念。
它是以系统内部状态为基础进行分析与综合的控制理论,两个重要的内容如下。
(1)最优控制:在给定的限制条件和评价函数下,寻求使系统性能指标最优的控制规律。
(2)最优估计与滤波:在有随机干扰的情况下,根据测量数据对系统的状态进行最优估计。
本章讨论控制系统的状态空间分析与综合,它是现代控制理论的基础。
8.1 控制系统的状态空间描述8.1.1 系统数学描述的两种基本方法统的内部结构和内部变量,如传递函数;另一种是状态空间描述(内部描述),它是基于系统内部结构的一种数学模型,由两个方程组成。
一个反映系统内部变量x和输入变量u间的关系,具有一阶微分方程组或一阶差分方程组的形式;另一个是表征系统输出向量y与内部变量及输入变量间的关系,具有代数方程的形式。
外部描述虽能反映系统的外部特性,却不能反映系统内部的结构与运行过程,内部结构不同的两个系统也可能具有相同的外部特性,因此外部描述通常是不完整的;内部描述则能全面完整地反映出系统的动力学特征。
8.1.2 状态空间描述常用的基本概念 1.输入和输出由外部施加到系统上的激励称为输入,若输入是按需要人为施加的,又称为控制;系统的被控量或从外部测量到的系统信息称为输出,若输出是由传感器测量得到的,又称为观测。
控制系统的状态空间分析与设计控制系统的状态空间分析与设计是现代控制理论的重要内容之一,它提供了一种描述和分析控制系统动态行为的数学模型。
状态空间方法是一种广泛应用于系统建模和控制设计的理论工具,其基本思想是通过描述系统内部状态的变化来揭示系统的特性。
一、状态空间模型的基本概念状态空间模型描述了系统在不同时间点的状态,包括系统的状态变量和输入输出关系。
在控制系统中,状态变量是指影响系统行为的内部变量,如电压、速度、位置等。
通过状态空间模型,可以将系统行为转化为线性代数方程组,从而进行分析和设计。
1. 状态方程控制系统的状态方程是描述系统状态演化的数学表达式。
一般形式的状态方程可以表示为:x(t) = Ax(t-1) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统在时刻t的状态向量,A是系统的状态转移矩阵,B是控制输入矩阵,u(t)是系统的控制输入,y(t)是系统的输出,C是输出矩阵,D是直接传递矩阵。
2. 状态空间矩阵状态空间矩阵包括系统的状态转移矩阵A、控制输入矩阵B、输出矩阵C和直接传递矩阵D。
通过这些矩阵,可以准确描述系统的状态变化与输入输出之间的关系。
3. 系统的可控性和可观性在状态空间分析中,可控性和可观性是评估系统控制性能和观测性能的重要指标。
可控性是指通过调节控制输入u(t),系统的状态可以在有限时间内从任意初始状态x(0)到达任意预期状态x(t)。
可控性可以通过系统的状态转移矩阵A和控制输入矩阵B来判定。
可观性是指通过系统的输出y(t)可以完全确定系统的状态。
可观性可以通过系统的状态转移矩阵A和输出矩阵C来判定。
二、状态空间分析方法状态空间分析方法包括了系统响应分析、系统稳定性分析和系统性能指标分析。
1. 系统响应分析系统的响应分析可以通过状态方程进行。
主要分析包括零输入响应和零状态响应。
零输入响应是指当控制输入u(t)为零时,系统的输出y(t)变化情况。
南京信息工程大学硕士研究生招生入学考试考试大纲
考试科目代码:817
考试科目名称:自动控制原理
第一部分大纲内容
一、课程目标
本课程为控制系统提供了数学模型的建立、性能分析和系统设计的基本方法。
要求考生掌握自动控制系统的基本理论知识和基本分析计算方法,强调基础性和综合性。
注重测试考生对相关的基本概念、理论和分析方法的理解,以及运用基本概念、基本原理,灵活分析和解决实际问题的能力。
二、基本要求
考试内容包括经典控制理论和现代控制理论。
要求理解、掌握:控制系统传递函数和信号流图等数学模型的建立;系统稳定性、动态性能、稳态性能的时域分析;根轨迹法;频域法;系统串联校正的设计方法;线性离散系统的分析;系统状态空间建模及其求解;系统可控性和可观测性;线性定常系统状态反馈及观测器设计;李雅普诺夫稳定性理论。
三、课程内容与考核目标
(1)自动控制的一般概念
1.掌握基本控制方式:开环、闭环(反馈)控制;
2.熟悉自动控制的性能要求:稳、快、准;
3.掌握反馈控制原理与动态过程的概念,以及建立原理方块图的方法。
(2)控制系统的数学模型
1.掌握动态方程建立及线性化方法;
2.熟练掌握结构图的等效变换方法;
3.掌握梅逊公式及应用;
4.熟悉典型环节。
(3)线性系统的时域分析法。
第六讲 控制系统的状态空间分析与综合经典控制理论主要以传递函数为基础,采用复域分析方法,由此建立起来的频率特性和根轨迹等图解解析设计法,对于单输入—单输出系统极为有效,至今仍在广泛成功地使用。
但传递函数只能描述线性定常系统的外部特征,并不能反映其全部内部变量变化情况,且忽略了初始条件的影响,其控制系统的设计建立在试探的基础之上,通常得不到最优控制。
复域分析法对于控制过程来说是间接的。
现代控制理论由于可利用数字计算机进行分析设计和实时控制,因此可处理时变﹑非线性﹑多输入-多输出系统的问题。
现代控制理论主要以状态空间法为基础,采用时域分析方法,对于控制过程来说是直接的。
它一方面能使设计者针对给定的性能指标设计出最优控制系统,另一方面还可以用更一般的输入函数代替特殊的所谓“典型输入函数”来实现最优控制系统设计。
随着控制系统的高性能发展,最优控制﹑最佳滤波﹑系统辨识﹑自适应控制等理论都是这一领域研究的主要课题。
在用状态空间法分析系统时,系统的动态特性是由状态变量构成的一阶微分方程组来描述的。
它能反映系统的全部独立变量的变化,从而能同时确定系统的全部运动状态,而且可以方便地处理初始条件。
第0节 必要的数学基础集和线性空间 基和基底变换向量范数、内积和格兰姆矩阵 线性变换及其矩阵表达式和范数 线性变换结构和线性代数方程组 特征值、特征向量和约当标准型 矩阵多项式和矩阵函数第一节 控制系统的状态空间描述一、状态空间的基本概念 1. 状态和状态变量表征系统运动的信息称为状态,足以完全表征系统运动状态的最小个数的一组变量称为状态变量。
一个用n 阶微分方程式描述的系统,就有n 个独立变量,当这n 个独立变量的时间响应都求得时,系统的运动状态也就被揭示无遗了。
因此,可以说该系统的状态变量就是n 阶系统的n 个独立变量。
状态变量的选取具有非唯一性,既可用某一组又可用另一组数目最少的变量作为状态变量。
状态变量不一定在物理上可量测,有时只具有数学意义,但实用时毕竟还是选择容易量测的量作为状态变量,以便满足实现状态反馈﹑改善性能的要求。

状态空间分析与控制系统设计状态空间分析和控制系统设计是现代控制理论中重要的基础概念和方法。
通过对系统的状态和状态方程进行建模和分析,可以实现对系统行为的全面理解和控制。
本文将介绍状态空间分析和控制系统设计的基本原理,并分析其在实际应用中的重要性和价值。
一、状态空间分析状态空间分析是一种将系统的动态行为表示为一组线性常微分方程或差分方程的方法。
在状态空间模型中,系统的行为被描述为一系列状态变量的演化过程,而不是传统的输入-输出模型。
通过状态空间模型,我们可以更加全面地了解系统的内部结构和动态性能。
在状态空间分析中,系统的行为由一组一阶微分方程或差分方程表示:x(t+1) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统的状态向量,表示系统的内部状态,u(t)是输入控制向量,y(t)是输出向量,A、B、C和D是系统的系数矩阵。
通过对状态空间方程进行求解和分析,可以得到系统的模态特性、状态转移矩阵、特征值和特征向量等重要信息。
这些信息能够帮助我们了解系统的稳定性、可控性和可观测性等特性,从而为系统的控制设计提供重要依据。
二、控制系统设计基于状态空间分析的控制系统设计是将系统的状态空间模型与控制算法相结合,实现对系统动态行为的控制和调节。
通过对状态空间方程的设计和调整,可以实现对系统的稳定性、响应速度、精度和鲁棒性等方面的要求。
常用的状态空间控制方法包括状态反馈控制、输出反馈控制和观测器设计等。
状态反馈控制是通过测量系统状态并构造一个状态反馈控制器来实现对系统的控制。
输出反馈控制是通过测量系统输出并构造一个输出反馈控制器来实现控制目标。
观测器设计是通过测量系统输出并估计系统状态来实现对系统的控制。
在控制系统设计过程中,我们需要考虑系统的稳定性、响应时间、鲁棒性和控制精度等方面的要求。
通过合理选择控制算法和调节参数,可以使系统在各种工作条件下保持良好的动态性能和稳定性,提高系统的控制质量和效率。
第八章 控制系统的状态空间分析一、状态空间的基本概念1. 状态 反应系统运行状况,并可用一个确定系统未来行为的信息集合。
2. 状态变量 确定系统状态的一组独立(数目最少的)变量,如果给定了0t t =时刻这组变量的值())()()(00201t x t x t x n 和0t t ≥时输入的时间函数)(t u ,则系统在0t t ≥任何时刻())()()(21t x t x t x n 的行为就可完全确定。
3. 状态向量 以状态变量为元素构成的向量,即[])()()()(21t x t x t x t x n =。
4. 状态空间 以状态变量())()()(21t x t x t x n 为坐标的n 维空间。
系统在某时刻的状态,可用状态空间上的点来表示。
5. 状态方程 描述状态变量,输入变量之间关系的一阶微分方程组。
6. 输出方程 描述输出变量与状态变量、输入变量间函数关系的代数方程。
二、状态空间描述(状态空间表达式)1. 状态方程与输出方程合起来称为状态空间描述或状态空间表达式,线性定常系统状态空间描述一般用矩阵形式表示,对于线性定常连续系统有⎩⎨⎧+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x (8-1)对于线性定常离散系统有⎩⎨⎧+=+=+)()()()()()1(k Du k Cx k y k Hu k Gx k x (8-2)2. 状态空间描述的建立:系统的状态空间描述可以由系统的微分方程,结构图(方框图),状态变量图、传递函数或脉冲传递函数(Z 传递函数)等其它形式的数学模型导出。
3. 状态空间描述的线性变换及规范化(标准型)系统状态变量的选择不是唯一的,状态变量选择不同,状态空间描述也不一样。
利用线性变换可将系统的矩阵A (见式8-1)规范化为四种标准型:能控标准型、能观标准型、对角标准型、约当标准型。
三、传递函数矩阵及其实现1. 传递矩阵)(s G :多输入多输出系统的输出向量的拉氏变换与输入向量的拉氏变换之间的传递关系,称为传递矩阵)(s G ,即)()()(s U s Y s G =(8-3) 式中:)(s U ——系统的输入向量 )(s Y ——系统的输出向量传递函数矩阵与多输入多输出系统状态空间描述的关系是:D B A I C G +-=-1)()(s s (8-4)上式中的A ,B ,C ,D 即为状态空间描述{}D C,B,A,中的矩阵A,B,C,D 。
控制系统的状态空间分析方法控制系统是指将输入信号进行处理,通过执行特定的控制算法,使系统输出信号满足特定要求的系统。
控制系统有多种形式,例如电子系统、机械系统、化学系统、热系统等等。
控制系统的设计和分析是一个复杂的过程,需要考虑多个因素,包括系统动态响应、稳定性、鲁棒性、控制器的性能指标等等。
控制系统的状态空间表示是一种广泛应用的分析方法。
状态空间表示是将系统的状态和状态方程用矩阵和向量的形式表示出来。
状态方程是一组描述系统动态响应的微分方程或差分方程。
状态空间表示可以描述线性系统和非线性系统。
对于线性系统,状态空间表示为:dx/dt = Ax + Buy = Cx + Du其中,x是状态向量,表示系统的内部状态,u是输入向量,表示外部输入,y是输出向量,表示系统响应,A、B、C、D是矩阵,分别表示状态方程中的系数。
状态空间表示的优点在于它可以提供系统的完整信息,包括系统的结构和动态特性。
通过状态空间表示可以计算系统的传递函数、频率响应、控制器设计等等。
状态空间表示的另一个优点在于它可以用于多变量控制和非线性控制。
在多变量控制中,状态空间表示可以直接描述多变量系统的动态特性和相互关系。
在非线性控制中,状态空间表示可以近似描述非线性系统的动态行为,从而进行控制器设计。
状态空间分析方法是指基于状态空间表示进行系统分析的方法。
常见的状态空间分析方法包括状态转移矩阵法、观测矩阵法、极点配置法、模型匹配法等等。
状态转移矩阵法是指根据系统的状态方程,计算系统状态随时间的演变。
状态转移矩阵可以用于计算系统的传递函数、频率响应等等。
观测矩阵法是指根据系统的状态方程和输出方程,计算系统的状态和输出之间的关系。
观测矩阵可以用于设计状态反馈控制器和观测器。
极点配置法是指根据系统的状态方程和性能指标,设计状态反馈控制器,使系统的极点满足指定的要求。
极点配置法可以用于设计稳定控制器和提高系统的性能指标。
模型匹配法是指通过拟合实验数据或理论模型,确定系统的状态方程和性能指标。
《自动控制理论II》中英文课程简介英文名称:Automatic Control Principle 课程编号:适用专业:安全工程测控技术与仪器电气工程及其自动化学时:72学分:4实验学时:8课内上机学时:0一、预修课程高等数学Ⅰ、复变函数与积分变换Ⅰ、线性代数Ⅰ、电路分析基础二、中文内容提要《自动控制理论II》主要介绍了自动控制理论的基本概念、分析方法和设计方法。
通过本课程的学习,使学生能够建立起控制系统的数学模型,利用经典控制理论和现代控制理论的分析方法进行系统的性能分析,并能够根据系统性能指标的要求进行系统的设计。
三、英文内容提要Automatic Control Principle mainly introduces: basic conceptions of automatic control principle, analytical methods, and design methods. The purpose is that students can found a mathematic model and systematically analyze capability of system and design system according to demand of capability index by studying this course.四、教材:《自动控制原理》.胡寿松.科学出版社,2004年五、教材类别:校外编制订者(签字):校对者(签字):审定者(签章):批准者(签章):《自动控制理论Ⅱ》课程教学大纲英文名称:Automatic Control Principle课程编号:适用专业:安全工程测控技术与仪器电气工程及其自动化学时:72 学分:4课程类别:学科大类基础课课程性质:必修课一、课程的性质和目的本课程是一门必修课。
通过本课程的学习,使学生建立经典控制理论部分的基本概念,学习现代控制理论的基本内容,掌握反馈控制原理的应用以及系统分析和设计的一般规律,同时,通过本课程的学习,使学生建立线性离散系统控制理论的基本概念,掌握线性离散系统分析和设计的一般规律。
第8章控制系统的状态空间分析与综合第1~7章涉及的内容属于经典控制理论的范畴,系统的数学模型是线性定常微分方程和传递函数,主要的分析与综合方法是时域法、根轨迹法和频域法。
经典控制理论通常用于单输入-单输出线性定常系统,其缺点是只能反映输入-输出间的外部特性,难以揭示系统内部的结构和运行状态,不能有效处理多输入-多输出系统、非线性系统、时变系统等复杂系统的控制问题。
随着科学技术的发展,对控制系统速度、精度、适应能力的要求越来越高,经典控制理论已不能满足要求。
1960年前后,在航天技术和计算机技术的推动下,现代控制理论开始发展,一个重要的标志就是美国学者卡尔曼引入了状态空间的概念。
它是以系统内部状态为基础进行分析与综合的控制理论,两个重要的内容如下。
(1)最优控制:在给定的限制条件和评价函数下,寻求使系统性能指标最优的控制规律。
(2)最优估计与滤波:在有随机干扰的情况下,根据测量数据对系统的状态进行最优估计。
本章讨论控制系统的状态空间分析与综合,它是现代控制理论的基础。
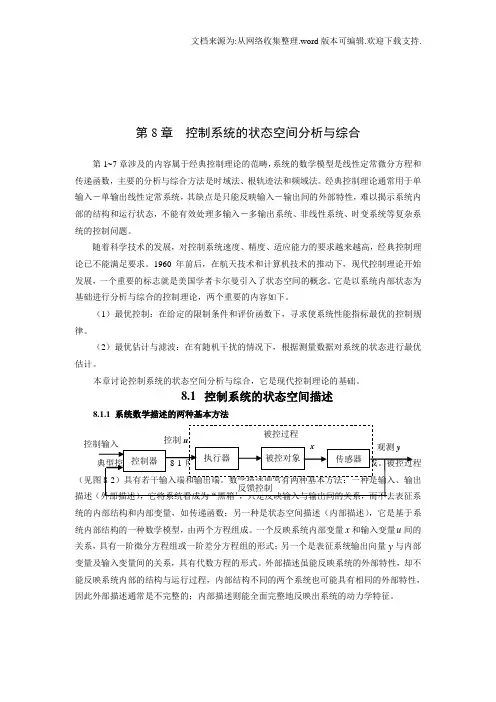
8.1 控制系统的状态空间描述8.1.1 系统数学描述的两种基本方法图8-1 典型控制系统方块图典型控制系统如图8-1所示,由被控对象、传感器、执行器和控制器组成。
被控过程327328(见图8-2)具有若干输入端和输出端。
数学描述通常有两种基本方法:一种是输入、输出描述(外部描述),它将系统看成为“黑箱”,只是反映输入与输出间的关系,而不去表征系统的内部结构和内部变量,如传递函数;另一种是状态空间描述(内部描述),它是基于系统内部结构的一种数学模型,由两个方程组成。
一个反映系统内部变量x 和输入变量u 间的关系,具有一阶微分方程组或一阶差分方程组的形式;另一个是表征系统输出向量y 与内部变量及输入变量间的关系,具有代数方程的形式。
外部描述虽能反映系统的外部特性,却不能反映系统内部的结构与运行过程,内部结构不同的两个系统也可能具有相同的外部特性,因此外部描述通常是不完整的;内部描述则能全面完整地反映出系统的动力学特征。
8.1.2 状态空间描述常用的基本概念1.输入和输出由外部施加到系统上的激励称为输入,若输入是按需要人为施加的,又称为控制;系统的被控量或从外部测量到的系统信息称为输出,若输出是由传感器测量得到的,又称为观测。
2.状态、状态变量和状态向量能完整描述和惟一确定系统时域行为或运行过程的一组独立(数目最小)的变量称为系统的状态,其中的各个变量称为状态变量。
当状态表示成以各状态变量为分量组成的向量时,称为状态向量。
系统的状态)(t x 由0t t =时的初始状态x (0t ) 及0t t ≥的输入)(t u 惟一确定。
对n 阶微分方程描述的系统,当n 个初始条件)(,),(),(0)1(00t x t xt x n -Λ&及0t t ≥的输入)(t u 给定时,可惟一确定方程的解,故)1(,,,-n x xx Λ&这n 个独立变量可选作状态变量。
状态对于确定系统的行为既是必要的,也是充分的。
n 阶系统状态变量所含独立变量的个数为n ,当变量个数小于n 时,便不能完全确定系统的状态,而当变量个数大于n 时,则存在多余的变量,这些多余的变量就不是独立变量。
判断变量是否独立的基本方法是看它们之间是否存在代数约束。
状态变量的选取并不惟一,一个系统通常有多种不同的选取方法。
但应尽量选取能测329量的物理量或独立贮能元件的贮能变量作为状态变量,以便实现系统设计。
在机械系统中,常选取位移和速度作为变量;在R-L-C 网络中,常选电感电流和电容电压作为状态变量;在由传递函数绘制的方块图中,常取积分器的输出作为状态变量。
3.状态空间以状态向量的n 个分量作为坐标轴所组成的n 维空间称为状态空间。
4.状态轨迹系统在某个时刻的状态,可以看作是状态空间的一个点。
随着时间的推移,系统状态不断变化,便在状态空间中描绘出一条轨迹,该轨迹称为状态轨迹。
5.状态方程描述系统状态变量与输入变量之间关系的一阶向量微分方程或差分方程称为系统的状态方程,它不含输入的微积分项。
状态方程表征了系统由输入所引起的状态变化,一般情况下,状态方程既是非线性的,又是时变的,它可以表示为[]t t u t x f t x),(),()(=& (8-1) 6.输出方程描述系统输出变量与系统状态变量和输入变量之间函数关系的代数方程称为输出方程,当输出由传感器得到时,又称为观测方程。
输出方程的一般形式为[]t t u t x g t y ),(),()(= (8-2) 输出方程表征了系统状态和输入的变化所引起的系统输出变化。
7.动态方程状态方程与输出方程的组合称为动态方程,又称为状态空间表达式,其一般形式为[][]⎭⎬⎫==t t u t x g t y t t u t x f t x ),(),()(),(),()(& (8-3a )或离散形式[][]⎭⎬⎫==+k k k k k k k k t t u t x g t y t t u t x f t x ),(),()(),(),()(1 (8-3b )8.线性系统:线性系统的状态方程是一阶向量线性微分方程或差分方程,输出方程是向量代数方程。
线性连续时间系统动态方程的一般形式为330⎭⎬⎫+=+=D(t)u(t)C(t)x(t)y(t))()()()()(t u t B t x t A t x & (8-4)设状态x 、输入u 、输出y 的维数分别为q p,n,,称n n ⨯矩阵A (t)为系统矩阵或状态矩阵,称p n ⨯矩阵()B t 为控制矩阵或输入矩阵,称n q ⨯矩阵C (t )为输出矩阵或观测矩阵,称p q ⨯矩阵D (t )为前馈矩阵或输入输出矩阵。
9.线性定常系统线性系统的A ,B ,C ,D 中的各元素全部是常数。
即⎭⎬⎫+=+=)t (Du )t (Cx )t (y )t (Bu )t (Ax )t (x & (8-5a )对应的离散形式为)()()()()()1(k Du k Cx k y k Hu k Gx k x +=+=+ (8-5b )⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n x x x x M 21 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=p u u u u M 21 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=q y y y y M 21⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=nn n n n n a a a a a a a a a A ΛM M M ΛΛ212222111211 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=np n n p p b b b b b b b b b B ΛM M M ΛΛ212222111211 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=qn q q n n c c c c c c c c c C ΛM M M ΛΛ212222111211 111212122212p p q q qp d d d d d d D d d d ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦LL M M M L 为书写方便,常把系统(8-5a)和系统(8-5b)分别简记为S(A,B,C,D )和S(G,H,C,D)。
10.线性系统的结构图线性系统的动态方程常用结构图表示。
图8-3为连续系统的结构图;图8-4为离散系统的结构图。
图中,I 为(n n ⨯)单位矩阵,s 是拉普拉斯算子,z 为单位延时算子。
331图8-3线性连续时间系统结构图 图8-4 线性离散时间系统结构图由于状态变量的选取不是惟一的,因此状态方程、输出方程、动态方程也都不是惟一的。
但是,用独立变量所描述的系统的维数应该是惟一的,与状态变量的选取方法无关。
动态方程对于系统的描述是充分的和完整的,即系统中的任何一个变量均可用状态方程和输出方程来描述。
状态方程着眼于系统动态演变过程的描述,反映状态变量间的微积分约束;而输出方程则反映系统中变量之间的静态关系,着眼于建立系统中输出变量与状态变量间的代数约束,这也是非独立变量不能作为状态变量的原因之一。
动态方程描述的优点是便于采用向量、矩阵记号简化数学描述,便于在计算机上求解,便于考虑初始条件,便于了解系统内部状态的变化特征,便于应用现代设计方法实现最优控制和最优估计,适用于时变、非线性、连续、离散、随机、多变量等各类控制系统。
(a ) (b )图8-5 电路的独立变量例8-1 试确定图8-5中(a )、(b )所示电路的独立状态变量。
图中u 、i 分别是输入电压和输入电流,y 为输出电压,i x ,i=1,2,3,为电容器电压或电感器电流。
解 并非所有电路中的电容器电压和电感器电流都是独立变量。
对图8-5(a )所示电路,不失一般性,假定电容器初始电压值均为0,有13232x c c c x +=13223x c c c x +=332因此,只有一个变量是独立的,状态变量只能选其中一个,即用其中的任意一个变量作为状态变量便可以确定该电路的行为。
实际上,三个串并联的电容可以等效为一个电容。
对图8-5(b )所示电路,x 1 = x 2,因此两者相关,电路只有两个变量是独立的,即(x 1和x 3)或(x 2和x 3),可以任用其中一组变量如(x 2,x 3)作为状态变量。
8.1.3 系统的传递函数矩阵设初始条件为零,对线性定常系统的动态方程进行拉氏变换,可以得到11()()()()[()]()X s sI A BU s Y s C sI A B D U s --=-=-+ (8-6)系统的传递函数矩阵(简称传递矩阵)定义为D B A sI C s G +-=-1)()( (8-7) 例8-2 已知系统动态方程为⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡2121212121100110012010x x y y u u x x x x &&试求系统的传递函数矩阵。
解 已知 011010,,,0020101A B C D ⎡⎤⎡⎤⎡⎤====⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦故⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++=⎥⎦⎤⎢⎣⎡+-=---210)2(11201)(11s s s s s s A sIC s G =)(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++⎥⎦⎤⎢⎣⎡=--210)2(111001210)2(111001)(1s s s ss s s s B A sI3338.1.4 线性定常系统动态方程的建立1.根据系统物理模型建立动态方程例8-3 试列写如图8-6所示的R-L-C 电路方程,选择几组状态变量并建立相应的动态方程,并就所选状态变量间的关系进行讨论。
图8-6 R-L-C 电路解 有明确物理意义的常用变量主要有:电流、电阻器电压、电容器的电压与电荷、电感器的电压与磁通。