$基于MatlabSimulink的多自由度机械振动系统仿真
- 格式:pdf
- 大小:303.89 KB
- 文档页数:6

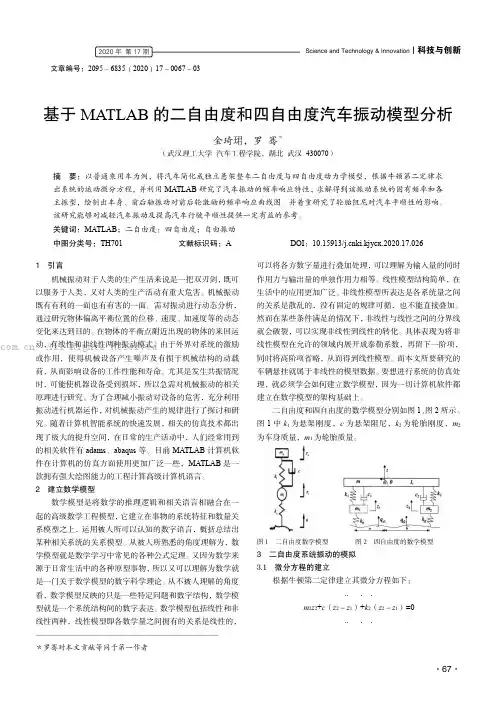
Science and Technology &Innovation ┃科技与创新2020年第17期·67·文章编号:2095-6835(2020)17-0067-03基于MATLAB 的二自由度和四自由度汽车振动模型分析金琦珺,罗骞*(武汉理工大学汽车工程学院,湖北武汉430070)摘要:以普通乘用车为例,将汽车简化成独立悬架整车二自由度与四自由度动力学模型,根据牛顿第二定律求出系统的运动微分方程,并利用MATLAB 研究了汽车振动的频率响应特性,求解得到该振动系统的固有频率和各主振型,绘制出车身、前后轴振动对前后轮激励的频率响应曲线图。
并着重研究了轮胎阻尼对汽车平顺性的影响。
该研究能够对减轻汽车振动及提高汽车行驶平顺性提供一定有益的参考。
关键词:MATLAB ;二自由度:四自由度;自由振动中图分类号:TH701文献标识码:A DOI :10.15913/ki.kjycx.2020.17.0261引言机械振动对于人类的生产生活来说是一把双刃剑,既可以服务于人类,又对人类的生产活动有重大危害。
机械振动既有有利的一面也有有害的一面。
需对振动进行动态分析,通过研究物体偏离平衡位置的位移、速度、加速度等的动态变化来达到目的。
在物体的平衡点附近出现的物体的来回运动,有线性和非线性两种振动模式。
由于外界对系统的激励或作用,使得机械设备产生噪声及有损于机械结构的动载荷,从而影响设备的工作性能和寿命。
尤其是发生共振情况时,可能使机器设备受到损坏,所以急需对机械振动的相关原理进行研究。
为了合理减小振动对设备的危害,充分利用振动进行机器运作,对机械振动产生的规律进行了探讨和研究。
随着计算机智能系统的快速发展,相关的仿真技术都出现了极大的提升空间,在日常的生产活动中,人们经常用到的相关软件有adams 、abaqus 等。
目前MATLAB 计算机软件在计算机的仿真方面使用更加广泛一些,MATLAB 是一款拥有强大绘图能力的工程计算高级计算机语言。
基于Matlab 的两自由度振动系统模拟实验报告一、 实验目的1、 深入了解两自由度振动系统的模态正交性。
2. 掌握Matlab 编程基本语言和两自由度系统的响应模态求解方法。
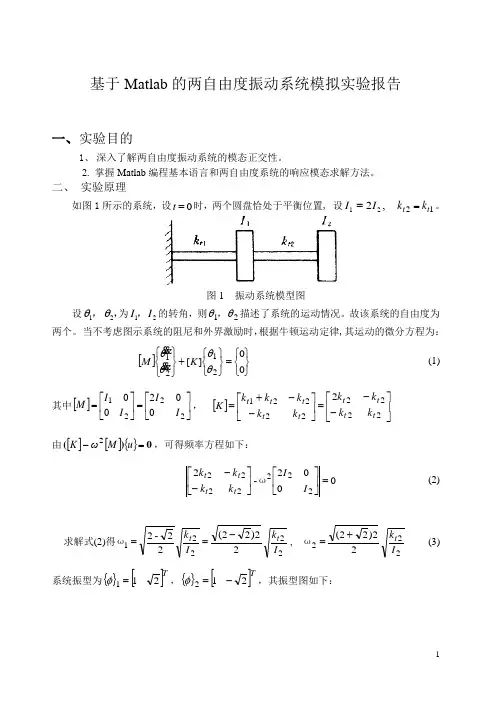
二、 实验原理如图1所示的系统,设0=t 时,两个圆盘恰处于平衡位置, 设,221I I =2t t k k =。
图1 振动系统模型图设,,21θθ为21I I ,的转角,则21θθ,描述了系统的运动情况。
故该系统的自由度为两个。
当不考虑图示系统的阻尼和外界激励时,根据牛顿运动定律,其运动的微分方程为:[]⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧00][2121θθθθK M(1)其中[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=222100200I I I I M ,]⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--+=2222222212t t t t t t t t t k k k k k k k k k K 由[][]{}0)(=-u M ωK 2,可得频率方程如下:0002-22222222=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--I I k k k k t t t t ω (2)求解式(2)得2222122)22(22-2I k I k t t -==ω, 22222)22(I k t +=ω (3)系统振型为{}[]T 211=φ,{}[]T 212-=φ,其振型图如下:图2 系统振型图令{}{}⎥⎦⎤⎢⎣⎡-==Φ2211],[][21φφ, 则 ⎥⎦⎤⎢⎣⎡=ΦΦ10014][][][2I M T, ⎥⎥⎦⎤⎢⎢⎣⎡=ΦΦ22212004][][][ωωI K T (4)式(4)为振动系统的模态正交特性。
当考虑图1系统的外界激励时,即{}t F F F ωsin 21⎭⎬⎫⎩⎨⎧=时,其运动的微分方程为: []t F F K M ωθθθθsin ][212121⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧ (5)为了求出方程(5)的稳态解,可令⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ,将⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ代入式(5),同时方程两边同乘以T ][Φ,并利用振动系统的模态正交特性,有t I F F I F F q q qq ωωωsin )4/()2()4/()2(0022122121222121⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-+=⎭⎬⎫⎩⎨⎧⎥⎥⎦⎤⎢⎢⎣⎡+⎭⎬⎫⎩⎨⎧(6)利用式(6)很容易求得t I F F I F F q q Tωωωωωsin ))4/()2(,)4/()2((22222122122121---+=⎭⎬⎫⎩⎨⎧, 再由⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ求得⎭⎬⎫⎩⎨⎧21θθ。
基于Matlab/Simulink的多自由度机械振动系统仿真作者:曾德惠, 黄松和, ZENG De-hui, HUANG Song-he作者单位:曾德惠,ZENG De-hui(湖北民族学院,理学院,湖北,恩施,445000;西南交通大学,机械工程学院,四川,成都,610031), 黄松和,HUANG Song-he(西南交通大学,机械工程学院,四川,成都,610031)刊名:湖北民族学院学报(自然科学版)英文刊名:JOURNAL OF HUBEI INSTITUTE FOR NATIONALITIES(NATURAL SCIENCES EDITION)年,卷(期):2008,26(1)被引用次数:1次1.郝桐生理论力学 20032.李兴玮.邱晓刚计算机仿真技术基础 20063.蒋志峰.楼易用 MATLAB进行单自由度系统机械振动试验[期刊论文]-力学与实践 2004(03)4.杨立主计算机控制与仿真技术 20035.王积伟.吴振顺控制工程基础 20016.商大中.李宏亮.韩广才结构动力分析 20057.沈辉精通SIMULINK系统仿真与控制 20038.王文娟机械振动分析的Matlab/Simulink 仿真研究[期刊论文]-现代电子技术 2006(24)9.欧进萍结构振动控制-主动、半主动和智能控制 200310.薛定宇.陈阳泉基于Matlab/Simulink的系统仿真技术与应用 200211.刘明精通Matlab7 20061.曾德惠粘滞阻尼器被动振动控制仿真研究[期刊论文]-湖北民族学院学报(自然科学版) 2009(2)本文链接:/Periodical_hbmzxyxb-zrkx200801017.aspx。
山东大学Matlab 课程作业学院:机械工程学院专业:姓名:学号:基于Simulink仿真得振动学问题解决实例1.单自由度无阻尼自由振动仿真表达式:仿真框图:参数设置:k=100N/m m=4kg初始状态:初速度为0 初始位移为5仿真结果:2.简谐波形得里沙茹图形分析仿真框图:参数设置:K=100m=4→rad/sSin wave参数设置:Amplitude1 ;Frequency 5 1015初始状态:①→φ=②→φ=③=1,=5→φ=45;④=1,=−5→φ=135;⑤=0,=−1→φ=180XY Graph参数x-min -2;x-max 2;y-min—2; y-max 2Frequency 5时仿真结果:Frequency 10时仿真结果:Frequency 15时仿真结果:3.单自由度有阻尼自由振动表达式:仿真框图:参数设置:ﻫ令k=100,m=10,c=10 初始状态:ﻫ初始速度为0,位移为1仿真结果:4、衰减振荡得阻尼比得估计参数:k=100,m=10,c=2初始条件:x0=1,v0=0仿真图框:初始振幅为1,约7个周期时衰减为0、25,对数减幅:δ=(ln4)/7≈0、099阻尼比§≈δ/2≈0、032理论值§=0、5c(km)−0、5≈0、0325、单自由度有阻尼+正弦激励表达式:令激励则方程变形为参数设置:令k=4,m=1,c=0、2初始状态:ﻫ初始速度为0,位移为0、05 仿真框图:仿真结果:6、利用速度共振得里沙茹图进行固有频率与阻尼系数分析仿真框图:改变激励频率:=1、2;1、6;1、8;1、9;1、95;2;2、05;2、1;2、2等7、两自由度无阻尼系统自由振动表达式:参数设置:m1=1,m2=2 k1=1,k2=1,k3=2初始状态:①速度0,m1、m2位移均为1②速度0,m1位移1,m2位移−0、5③速度0,m1位移1,m2位移0 仿真结果:①②③。
目 录1引言——机械振动的仿真原理 (5)1.1 Matlab Simulink 功能简述 (5)1.2机械振动的物理模型 (5)1.2.1简谐振动的物理模型 (5)1.2.2阻尼振动的物理模型 (6)1.2.3受迫振动的物理模型 (6)1.3 Matlab Simulink 仿真原理简述 (8)2简谐振动方程的解及其模拟仿真 (9)2.1简谐振动方程的求解 (9)2.2简谐振动模型的仿真研究 (9)2.2.1基本模型的建立 (9)2.2.2 速度、加速度的监测 (11)2.2.3 动能、势能、机械能监测 (12)2.3简谐振动的图像分析 (13)3阻尼振动方程的求解和仿真模拟 (15)3.1弹簧振子做阻尼振动方程的求解 (15)3.2弹簧振子做阻尼振动的模拟仿真研究 (15)3.3阻尼振动的图像分析 (18)4受迫振动的方程的求解和仿真模拟 (20)4.1弹簧振子做受迫振动方程的求解 (20)4.2弹簧振子做受迫振动的仿真模拟研究 (21)4.2.1策动力频率0ωω<时弹簧振子的受迫振动仿真模拟 (21)4.2.2策动力频率0ωω>时弹簧振子受迫振动的仿真模拟 (24)4.2.3策动力频率0ωω=时弹簧振子的仿真模拟 (26)4.3受迫振动的图像分析 (27)5几点补充说明与仿真模拟中问题分析 (29)5.1物理振动模型建立的补充说明 (29)5.2方程求解中的补充说明 (29)5.3仿真模拟中的问题分析 (29)6结语 (31)参考文献 (32)附录 (33)致谢 (34)摘要机械振动主要有简谐振动,阻尼振动,受迫振动三种。
对三种振动建立模型,列出振动方程,再对三种振动给定初始条件,就可以利用Matlab Simulink功能对三种振动进行仿真模拟,得出振动的位移,速度,加速度,动能,势能,机械能随时间的变化关系图像。
另外,我们对振动方程求解,得出振子位移关于时间的函数,再分别对其求一阶、二阶导数,就可以得出速度、加速度函数,再经过简单运算就可以得到动能、势能、机械能函数。
0引言在实际工程中,许多物体都涉及到振动问题,比如在行驶过程中的汽车、城市轨道车辆、高速运行的动车等。
但是对于很多复杂物体的振动分析较为困难,因此在分析的过程中要加以简化才可以。
通常而言,大部分物体振动可以简化为简单的三自由度系统,这样更加方便计算和分析。
比如现在的汽车在满足安全的同时追求更好的驾驶舒适性,其车的结构也是越来越复杂。
大多数汽车座椅下面使用了弹簧和橡胶来吸收振动、缓解冲击,同时在汽车底盘和轮胎处都采用了减振装置,这所有就可以看成一个三自由度的系统。
简化模型来解决复杂振动问题,可以采用理论分析和数值仿真,数值仿真通常用Matlab 。
本文主要针对工程中常用的三自由度系统的简化模型进行了分析,综合采用理论计算和数值仿真。
理论计算做了三自由度的运动微分方程、固有频率和主振型的计算,数值仿真做了系统的模型用来分析各部分在外界激励的作用下的位移响应曲线。
本文用的是Simulink 动态分析,它可以在做出实际系统之前,预先对设计的系统进行仿真分析,并可以根据仿真结果随时进行参数的修正,提高系统的性能和稳定性,以减少对实际系统的设计与修改,实现高效率的开发和设计分析系统的目的。
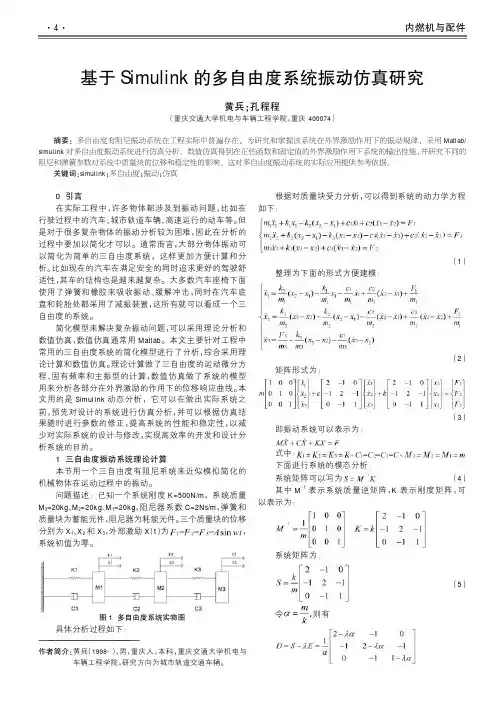
1三自由度振动系统理论计算本节用一个三自由度有阻尼系统来近似模拟简化的机械物体在运动过程中的振动。
问题描述:已知一个系统刚度K=500N/m ,系统质量M 3=20kg 、M 2=20kg 、M 1=20kg ,阻尼器系数C=2Ns/m ,弹簧和质量块为蓄能元件,阻尼器为耗能元件。
三个质量块的位移分别为X 1、X 2和X 3,外部激励X (t )为,系统初值为零。
图1多自由度系统实物图具体分析过程如下:根据对质量块受力分析,可以得到系统的动力学方程如下:(1)整理为下面的形式方便建模:(2)矩阵形式为:(3)即振动系统可以表示为:式中:、、下面进行系统的模态分析:系统矩阵可以写为(4)其中M -1表示系统质量逆矩阵,K 表示刚度矩阵,可以表示为:系统矩阵为:(5)令,则有———————————————————————作者简介:黄兵(1998-),男,重庆人,本科,重庆交通大学机电与车辆工程学院,研究方向为城市轨道交通车辆。
基于Simulink的机械振动系统仿真
席平原
【期刊名称】《机床与液压》
【年(卷),期】2005(000)006
【摘要】通过列举一些实例,分析了Matlab/Simulink软件在二自由度机械振动系统仿真中的应用,不但大大地提高了编程的效率,而且提高了编程的质量和可靠性,取得了很好的效果.
【总页数】2页(P175-176)
【作者】席平原
【作者单位】淮海工学院机械系,江苏,连云港,222001
【正文语种】中文
【中图分类】TP312
【相关文献】
1.基于Matlab/Simulink的多自由度机械振动系统仿真 [J], 曾德惠;黄松和
2.基于系统仿真的旋转机械振动故障诊断方法 [J], 庄莉莉
3.基于MATLAB and Simulink的波浪能装置液压能量转换系统仿真研究 [J], 叶寅;盛松伟;乐婉贞;王坤林;张亚群
4.基于Matlab/Simulink风电机组测试平台液压加载系统仿真研究 [J], 朱怡;孙渊;陈国初
5.基于Simulink的多自由度机械振动系统仿真 [J], 匡伟春;张柏清;张传才
因版权原因,仅展示原文概要,查看原文内容请购买。
作业任务包括:一、建立前轮角阶跃输入的汽车三自由度操控模型,并且参数可调。
二、绘制六面体并实现对六面体的三维操作,包括平移、旋转、缩放等。
三、动画:本文动画的实现是在对六面体的具体操作过程(平移、旋转、缩放)中表现。
四、GUI与simulink的联合仿真,并将所有作业内容集成到GUI界面,将程序进行编译,打包生exe的成可执行文件。
汽车三自由度操控模型1.1建模假设:•1、汽车车速不变。
•2、不考虑切向力对轮胎特性的影响。
•3、侧向加速度不大于0.3-0.4g 。
•4、前轮转角不大,不考虑前轮左右的区别。
•5、不考虑非悬架质量的倾角。
•6、不考虑空气动力作用。
•7、侧倾中心与非悬架质心等高,前后一样。
•8、左右对称。
假设汽车的结构:•前面是独立悬架。
•后面是纵置半椭圆板簧。
•车厢侧倾引起:前轮外倾角变化;后轴发生轴转向;左右侧车轮载荷重新分配引起滚动阻力不相等而产生绕Z轴的力矩。
1.2汽车模型受力分析车辆坐标系如图1所示图1 车辆坐标系M、Ms、Mu分别是整车、悬挂和非悬挂质量,M=Ms、Mu其质心分别是c.g. 、s和u。
如图二所示图2 车辆质量分布示意图汽车三自由度模型的三个自由度指:汽车沿y 轴平动的自由度、汽车绕z 轴的转动自由度、汽车绕x 轴的转动自由度。
一般分别用横向速度v 、横摆角速度r 、侧倾角φ来表征。
汽车三自由度模型的微分方程为:()()s r z xz r p s x xz s p M v rV M h Y Y r Y Y I r I N N r N N N p I I r M h v rV L L βφδβφδφφβφδφβφδφφφ⎫++=+++⎪-=++++⎬⎪-++=+⎭(1-1)其中各个参数的意义如下:算子说明:21k k Y +=β ()211bk ak VY r -=122Y Y Y k φαφφ∂∂=-∂∂ 其中:11YY γ∂∂前轮外倾刚度;1γφ∂∂侧倾外倾角系数;2αφ∂∂后轴侧倾转向系数。
简谐振动Simulink 建模与仿真张三(陕西 西安 西安科技大学 710054)摘要:本文利用Matlab 软件中的simulink 组件对机械振动进行了仿真计算,得到了机械振动中最常见的一种振动简谐振动的波形图,经过分析发现图像与理论是符合的。
我们得出振子的机械能为一定值。
从能量角度分析,做简谐振动的振子只受弹力作用,系统机械能守恒。
关键词:简谐振动;振动波形;机械能守恒0引言物理学中的机械振动主要分为简谐振动、阻尼振动、受迫振动三种。
下面我们根据这三种类型的振动中的简谐振动建立物理模型来分别研究。
1简谐振动的物理模型图1 弹簧振子做简谐振动物理实验模型如上图所示,弹簧振子在O 附近做简谐振动。
已知弹簧振子质量为m ,所受合力为F ,弹簧劲度系数为k ,则有:F kx =- 。
又由牛顿第二定律有:(1)于是可以得到: 220d x k x dt m+= (2) 令m k =2ω,则可得: 2220d x x dt ω+= (3) O A A -x F22d x F ma m dt ==方程(3)的解x 即为弹簧振子在时刻t 时的振动位移,一阶导数x即为弹簧振子在时刻t 时振动速度,其二阶导数x即为弹簧振子在时刻t 时的加速度。
2简谐振动的数学模型这里,我们设系统初始条件为0t =s 时,04m x =,00m/s v =。
通过高等数学方法解这个齐次微分方程可得:221212cos sin cos()cos()x C t C t C C t A t ωωωϕωϕ=+=++=+ (12) 式中222121tan ,C A C C C ϕ=-=+。
则速度表达式为:sin()v x A t ωωϕ==-+ ,将初始条件代入(12)式,可得: 4cos()x t ωϕ=+(13) 这就是满足初始条件的简谐振动方程的解。
由(13)式我们可以得出弹簧振子位移随时间的变化情况。
振子周期为2T πω=。
0s t =时,振子位移正向最大位移出,即图1中的A 位置,此时振子速度为0,加速度最大;经4T ,振子向负方向运动到平衡位置,此时振子速度最大,加速度为0;再经4T ,振子继续向负方向运动到负的最大位移处,此时速度为0,加速度最大;再经过4T ,振子向正向运动到平衡位置,此时速度最大,加速度为0;最后经过4T ,振子回到初始位置,即正的最大位移处,完成一个周期的振动。
基于MATLAB的多自由度系统的振动特性分析多自由度系统是指由多个质点构成的机械系统,每个质点在三维空间内可以有自由度运动。
这些系统在工程领域中广泛应用于建筑物、桥梁、航天器等结构的振动分析与设计。
MATLAB作为一种强大的数学计算软件,可以用来进行多自由度系统的振动特性分析。
多自由度系统的振动特性可通过建立系统的动力学方程,并进行求解来确定。
首先,需要确定系统的质量矩阵、刚度矩阵和阻尼矩阵。
质量矩阵描述了系统中各个质点的质量分布情况,刚度矩阵描述了系统中各个质点之间的刚度关系,阻尼矩阵描述了系统中各个质点之间的阻尼关系。
这些矩阵的形式可以通过几何关系和材料性质确定。
然后,可以通过将质量矩阵、刚度矩阵和阻尼矩阵组合成一个动力学方程来描述多自由度系统的振动行为。
动力学方程通常采用矩阵形式表示,形式为MX''+KX+CX'=F,其中M是质量矩阵,K是刚度矩阵,C是阻尼矩阵,X是位移向量,F是外力向量,X''是位移向量的二阶导数,X'是位移向量的一阶导数。
利用MATLAB可以求解动力学方程。
可以使用ode45函数或者ode15s函数来求解微分方程组。
这些函数可以将微分方程组转化为一连串的时间步长上的代数方程组,然后使用数值方法进行求解。
其中,ode45函数适用于非刚性振动系统求解,ode15s函数适用于刚性振动系统求解。
在求解动力学方程之后,可以得到系统的模态参数和振型。
模态参数是指系统的固有频率和模态阻尼比,它们可以反映系统的振动特性。
振型是指系统在不同频率下的位移分布情况,它们可以帮助分析系统的工作状态和结构设计。
MATLAB可以通过eig函数来求解系统的模态参数和振型。
除了求解动力学方程外,MATLAB还提供了一些其他的分析方法用于多自由度系统的振动特性分析。
比如,通过画出系统的频率响应曲线、幅频特性曲线和相频特性曲线,可以直观地了解系统的频率响应、幅度响应和相位响应。
基于Simulink的多自由度机械振动系统仿真
匡伟春;张柏清;张传才
【期刊名称】《煤矿机械》
【年(卷),期】2007(28)12
【摘要】针对多自由度机械振动问题,以弹簧质量系统、轴上带有若干圆盘的扭转振动系统和梁上有集中质量的横向振动系统为例,详细介绍在Matlab/Simulink平台上利用状态空间法进行多自由度系统仿真的方法及步骤,并对仿真结果进行了分析。
【总页数】4页(P54-57)
【关键词】多自由度;机械振动;Simulink;仿真;状态空间
【作者】匡伟春;张柏清;张传才
【作者单位】景德镇陶瓷学院;西安建筑科技大学
【正文语种】中文
【中图分类】TP391;TH113.1
【相关文献】
1.基于Simulink的机械振动系统仿真 [J], 席平原
2.基于Matlab/Simulink的多自由度机械振动系统仿真 [J], 曾德惠;黄松和
3.基于Simulink的多自由度系统振动仿真研究 [J], 黄兵;孔程程
4.基于Simulink的多自由度系统振动仿真研究 [J], 黄兵;孔程程
5.基于ADAMS与Simulink的六自由度摇摆台系统联合仿真研究 [J], 陈勇军;韩霄翰;张炎;张海坤
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Matlab/Simulink的多自由度机械振动系统仿真
作者:曾德惠, 黄松和, ZENG De-hui, HUANG Song-he
作者单位:曾德惠,ZENG De-hui(湖北民族学院,理学院,湖北,恩施,445000;西南交通大学,机械工程学院,四川,成都,610031), 黄松和,HUANG Song-he(西南交通大学,机械工程学院,四川,成都
,610031)
刊名:
湖北民族学院学报(自然科学版)
英文刊名:JOURNAL OF HUBEI INSTITUTE FOR NATIONALITIES(NATURAL SCIENCES EDITION)
年,卷(期):2008,26(1)
被引用次数:2次
1.郝桐生理论力学 2003
2.李兴玮;邱晓刚计算机仿真技术基础 2006
3.蒋志峰;楼易用 MATLAB进行单自由度系统机械振动试验[期刊论文]-力学与实践 2004(03)
4.杨立主计算机控制与仿真技术 2003
5.王积伟;吴振顺控制工程基础 2001
6.商大中;李宏亮;韩广才结构动力分析 2005
7.沈辉精通SIMULINK系统仿真与控制 2003
8.王文娟机械振动分析的Matlab/Simulink 仿真研究[期刊论文]-现代电子技术 2006(24)
9.欧进萍结构振动控制-主动、半主动和智能控制 2003
10.薛定宇;陈阳泉基于Matlab/Simulink的系统仿真技术与应用 2002
11.刘明精通Matlab7 2006
1.杨正宇.周美立基于Simulink的机械系统动力学数字仿真[期刊论文]-合肥工业大学学报(自然科学版)
2002,25(5)
2.匡伟春.张柏清.张传才.KUANG Wei-chun.ZHANG Bai-qing.ZHANG Chuan-cai基于Simulink的多自由度机械振动系统仿真[期刊论文]-煤矿机械2007,28(12)
3.席平原.XI Ping-yuan基于Simulink的机械振动系统仿真[期刊论文]-机床与液压2005(6)
4.任中全.郭世伟.何万库振动系统的时频域仿真分析研究[期刊论文]-计算机仿真2002,19(1)
5.郭世伟.任中全.何万库机械振动系统的MATLAB仿真分析[期刊论文]-煤矿机械2000(12)
6.孟令启.马金亮.黄其柏.MENG Ling-qi.MA Jin-liang.HUANG Qi-bai基于Matlab的4200轧机垂直振动仿真[期刊论文]-钢铁研究学报2007,19(7)
7.蒋志峰.楼易用MATLAB进行单自由度系统机械振动试验[期刊论文]-力学与实践2004,26(3)
8.王文娟.WANG Wenjuan机械振动分析的Matlab/Simulink仿真研究[期刊论文]-现代电子技术2006,29(24)
1.张明辉.禚宝海Diamond并联机械手动力学仿真的Simulink实现[期刊论文]-山东科技大学学报(自然科学版)2010(1)
2.黄松和.朱建梅.谢大帅电磁振动给料系统的动态仿真分析[期刊论文]-矿山机械 2013(12)
3.曾德惠粘滞阻尼器被动振动控制仿真研究[期刊论文]-湖北民族学院学报(自然科学版) 2009(2)
本文链接:/Periodical_hbmzxyxb-zrkx200801017.aspx。