振动力学4多自由度系统振动之一动力学方程
- 格式:ppt
- 大小:1.73 MB
- 文档页数:69
![振动力学[PDF]](https://uimg.taocdn.com/92c08dc6250c844769eae009581b6bd97f19bcea.webp)
第四章多自由度系统的振动4.1多自由度系统运动方程的建立4.2 耦合与坐标变换4.3 固有频率和主振型4.4振型矩阵、主坐标和正则坐标4.5 固有频率相等的情况4.6 固有频率为零的情况4.7 无阻尼系统对初始条件的响应4.8 无阻尼系统对任意激励的响应4.9 多自由度系统的阻尼4.10 有阻尼系统的响应4.11 一般粘性阻尼系统的响应一般粘性阻尼系统的响应i nj nj j j i j j i nj j j i ==•=••111i n j n j j j i j j i n j j j i Q q k q c q m =++∑∑∑==•=••111•••[][]{}[]{}{}Q q k q c q m =++⎭⎬⎫⎩⎨⎧•••nn n n n n 212222111211212222111211nn n n n n 212222111211212222111211nn n n n n 212222111211212222111211••••••n 11•••n 11n 11n 11inj nj j j i j j i nj j j i ==•=••111i n j n j j j i j j i n j j j i P x k x c x m =++∑∑∑==•=••111•••[][]{}[]{}{}P x k x c x m =++⎭⎬⎫⎩⎨⎧•••n 2121•i ••i1m 12m 23m 3ii •i i Q q Dq T =∂∂+∂∂•1m 12m 23m 32222)2221k +2222•2221⎟⎠⎞+•x c jjj j q W δδ11x δ11P 111x P δ1x δ22P 33P 2⎟⎠⎞21221212212111••••122121221211123323212332321222•••••2332321233232122233323332333••••33323332333•••••••••321333322221321321321333322221321321000000003213213333222213213213333222210•1•1θv ••2θv •1•=1θ•2•=2θ22θ−+mg l 22θl +k Oθ222yk+=•••[][]{}[]{}{}P x k x c x m =++⎭⎬⎫⎩⎨⎧•••••••••n n i j j i i 1111•••nn i j j i i 1111in n i j j i i 1111i j刚度影响系数k i j 若系统各自由度的广义速度和广义加速度为零,除j i i j i 。
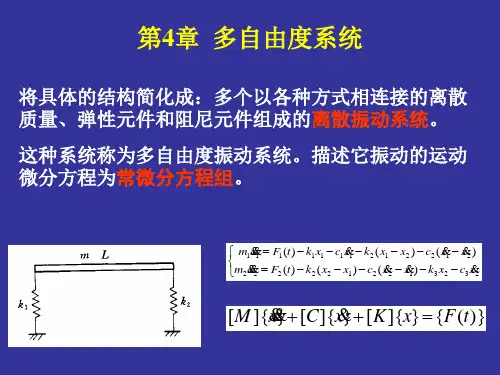
船体振动基础1第章多自由度系统的振第2章多自由度系统的振动一、引言二、两自由度系统的振动三、多自由度系统的振动四、振动方程建立的其他方法2有阻尼的多自由度系统振动1、拉格朗日方程式1、拉格朗日方程式P38拉格朗日法是建立微分方程一种简单的方法:先求出系统的动能、势能,进而得出质量矩阵和刚度矩阵.优点:系统的动能和势能都是标量,无需考虑力的方向。
141、拉格朗日方程式P38拉格朗日第二类方程式适用于完整约束的系统。
完整约束完整约束:当约束方程本身或约束方程通过积分后可以下式所示的形式表示时,称为完整约束。
不完整约束:当约束方程本含有不能积分的速度项时,系统的约束称为不完整约束。
具有不完整约束的系统,系统的自由度不等于广义坐标数自由度数小于广义坐标数于广义坐标数,自由度数小于广义坐标数。
151、拉格朗日方程式P3811•位移方程和柔度矩阵P40对于静定结构,有时通过柔度矩阵建立位移方程比通过对于静定结构有时通过m1x1x2以准静态方式作用在梁上。
梁只产生位移(即挠度),不产生加速度。
的静平衡位置为坐标P1=1 f11 f21 f12P2=1 f22(1)P1 = 1、P2 = 0 时 m1 位移:x1 = f11 m2 位移:x2 = f 21 (3)P1、P2 同时作用 m1 位移: 位移 x1 = f11 P 1 + f12 P 2 m2 位移:x2 = f 21 P 1 + f 22 P 2(2)P1 = 0、P2 = 1 时 m1 位移:x1 = f12 m2 位移:x2 = f 22P1 m1 x1 x2 P2 m2P1=1 f11 f21 f12 P1 m1 x1P2=1 f22 P2 m2 x2P 同时作用时 1、P 2 同时作用时:x1 = f11P 1 + f12 P 2 x2 = f 21P 1 + f 22 P 2矩阵形式 X = FP 矩阵形式:⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦f ij 柔度影响系数f12 ⎤ f 22 ⎥ ⎦⎡ f11 F=⎢ ⎣ f 21⎡P 1⎤ P=⎢ ⎥ ⎣ P2 ⎦物理意义: 系统仅在第 j 个坐标受到 单位力作用时相应于第 i 个坐标上产生的位移柔度矩阵P1 m1 x1P2 m2 x2P1(t) m1 m2P2(t)&1 m1 & x&2 m2 & xX = FP⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P 1⎤ ⎢P ⎥ f 22 ⎥ ⎦⎣ 2 ⎦当P 1、P 2 是动载荷时 集中质量上有惯性力存在⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P && 1 (t ) − m1 x1 ⎤ ⎢ P (t ) − m & ⎥ f 22 ⎥ & x 2 2⎦ ⎦⎣ 2⎡ x1 ⎤ ⎡ f 11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21位移方程:f 12 ⎤⎛ ⎡ P1 (t ) ⎤ ⎡m1 ⎜⎢ −⎢ ⎥ ⎥ ⎜ f 22 ⎦⎝ ⎣ P2 (t ) ⎦ ⎣ 0&1 ⎤ ⎞ 0 ⎤⎡ & x ⎟ ⎥ ⎢ ⎥ &2 ⎦ ⎟ m2 ⎦ ⎣ & x ⎠&& ) X = F ( P − MXP1(t) m1 m2P2(t)⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦⎡P 1 (t ) ⎤ P=⎢ ⎥ P ( t ) ⎣ 2 ⎦&1 m1 & x&2 m2 & x位移方程 位移方程:&& ) X = F ( P − MX也可按作用力方程建立方程:&& + KX = P MX刚度矩阵&& + X = FP FMX柔度矩阵与刚度矩阵的关系 柔度矩阵与刚度矩阵的关系:&& KX = P − MX若K非奇异F=K−1FK = I&& ) X = K −1 ( P − MX应当注意:对于允许刚体运动产生的系统(即具有刚体自由度的系统) , 柔度矩阵不存在。

第四章多自由度体系无阻尼自由振动主要内容1 多自由度体系的自振振型和自振频率2 振型的正交性3 位移的振型展开和能量的振型展开1 多自由度体系的自振振型和自振频率所谓振型就是结构体系在无外荷载作用时的自由振动时的位移形态,N个自由度体系有N个不同的振型。
当结构按某一振型振动时,自振频率是与之相对应的常量。
因此对N个自由度体系,一般情况下有个N个自振频率。
多自由度结构的振型和自振频率是结构的固有特性,和单自由度一样是反映结构动力特性的主要量。
因此在讲到结构动力特性时,首先想到的就是结构的自振振型和频率。
结构的自振振型和频率,可通过分析结构的无阻尼自由振动方程获得。
多自由度体系无阻尼自由振动的方程为:其中[M ]、[K ]为N ×N 阶的质量和刚度矩阵,{u }和{ü}是N 阶位移和加速度(或广义坐标)向量,{0}是N 阶零向量。
上式是体系作自由振动时必须满足的控制方程,下面分析当位移向量{u }是什么形式时可以满足此式要求。
[]{}[]{}{}0=+u K uM根据前面经验,多自由度体系的振动形式可写为:{φ}—表示体系位移形状向量,它仅与坐标位置有关,不随时间变化,称为振型。
ω—简谐振动的频率,θ—相位角。
上式对时间求两次导数可得{}{}{})sin()(θωφ+==t t u u {}{}{})sin()(2θωφω+−==t t u u对于稳定结构体系,其质量阵与刚度阵具有实对称性和正定性,所以相应的频率方程的根都是正实根。
对于N 个自由度的体系,频率方程是关于ω2的N 次方程,由此可以解得N 个根(ω12<ω22<ω32…<ωN 2)。
ωn (n =1, 2, …, N )即为体系的自振频率。
其中量值最小的频率ω1叫基本频率(相应的周期T 1=2π/ω1叫基本周期)从以上分析可知,多自由度体系只能按一些特定的频率即按自振频率做自由振动。
按某一自振频率振动时,结构将保持一固定的形状,称为自振振型,或简称振型。