二级倒立摆的二次型最优控制研究a
- 格式:pdf
- 大小:295.05 KB
- 文档页数:3


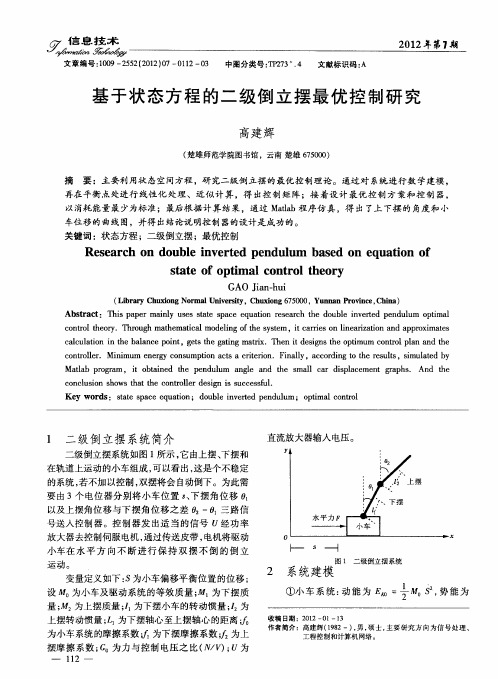
实验报告姓名:王琳学号:12030078一、控制对象描述本实验的控制对象是二级倒立摆系统,它主要由机电装置和控制装置两部分组成,机电装置的结构主要由小车、两根摆杆及连接轴构成。
假设系统中的每一根摆杆都是匀质刚体,忽略实验中的摩擦力,驱动力与放大器的输入成正比且无延迟地直接作用于小车上。
设定摆杆竖直向上时,下摆杆角位移、上摆杆角位移均为零,摆杆顺时针旋转为正。
下图为二级倒立摆模型。
二、系统建模设x为小车质量,下摆杆质量为M1l1,上摆杆质量为M2,转动惯量为J1,上摆杆重心到转轴b 间的长度l2,小车与地面摩擦力系数f ,下摆杆转轴a 与b 间的长度L ,重力加速度g 。
运用牛顿力学定律建立方程:2212112211222222()()cos ()sin cos sin F f x m M M x M l M l M l M l M l M l ααααββββ∙∙∙∙∙∙∙=+++++-++-222222222222222222222222222sin cos sin sin sin 2sin cos sin cos sin cos cos cos cos J M gl M Ll M Ll M l M l M l x M Ll M Ll M l ββαβααβαββββββαβααβαββ∙∙∙∙∙∙∙∙∙∙=+∙+∙+∙+∙-+∙-∙-∙222221111122222222221111222222222sin sin sin 2sin sin sin sin cos sin sin cos cos cos cos cos sin cos cos J M gl M l M gL M L M L M Ll M Ll M l x M l M L x M L M Ll M Ll ααααααβααααββαββαααααααββαββ∙∙∙∙∙∙∙∙∙∙∙∙∙∙=+∙++∙+∙+∙+∙--∙-∙-∙+∙-∙经过线性化得到如下式子:12112222()()F f x m M M x M l M l M l αβ∙∙∙∙∙∙∙=++++++ 2222222222J M gl M l x M Ll M l ββαβ∙∙∙∙∙∙=---22111211211222()()()J M gl M gL M l M L x M l M L M Ll αααβ∙∙=+-+-+-参数取值:g=9.8;m=1.328;M1=0.22;M2=0.187;l1=0.303;l2=0.2261122334455660100000016.7 1.300.100.70001000039.118.107.90 1.70000010068.514.4025.900.3x x x x x x F x x x x x x ∙∙∙∙∙∙⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦ 123456100000001000000010000000100000001000000010x x x x x Y F x x x ααββ∙∙∙⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦可以得到A 、B 、C 、D :10000016.7 1.300.10000100039.118.107.90000001068.514.425.90A ⎡⎤⎢⎥--⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥--⎣⎦00.701.700.3B ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥⎣⎦100000010000001000000100000010000001C ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦000000D ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦三、系统分析与控制器设计采用线性二次型最优控制器(linearquadraticregulator —LQR)对系统进行控制。
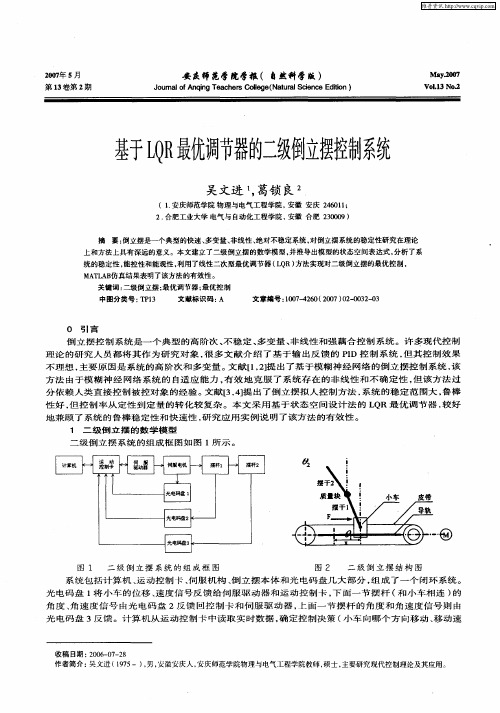
基于LQR的二级倒立摆控制系统研究摘要倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的高阶不稳定系统,它是检验各种新的控制理论和方法有效性的典型理想模型。
在其控制过程中,能有效地反映诸如镇定性、鲁棒性、随动性以及跟踪等许多关键问题。
本文主要研究二级倒立摆LQR控制方法。
首先建立了二级倒立摆的数学模型,然后对二级倒立摆的数学模型进行控制设计,应用遗传算法确定系统性能指标函数中的加权阵Q,R得到系统状态反馈控制矩阵。
最后,用MATLAB进行了系统仿真。
在几次凑试Q矩阵值后系统的响应结果都不尽如人意,于是采用遗传算法对Q矩阵优化。
仿真结果证明:经过遗传算法优系统响应能更加满足设计要求。
关键词二级倒立摆;LQR控制;遗传算法Research on double inverted pendulum controlsystem based on LQRAbstractThe inverted pendulum is a typical high order system, with multi- variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum LQR. First of all, the mathematical model of the double inverted pendulum is established, then make a control design to double inverted pendulum on the mathematical model, and determine the system performance index weight matrix Q, R by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made by MATLAB. After several test matrix Q value the results are not satisfactory response, then we optimize Q matrix by using Genetic Algorithm. Simulation results show: The system response can meet the design requirements effectively after Genetic Algorithm optimization.Key words Double inverted pendulum; LQR control; Genetic Algorithm.目录摘要 (I)Abstract (II)第1章绪论 (1)1.1引言 (1)1.2倒立摆设备简介 ..................................... 错误!未定义书签。

基于倒立摆的两种控制策略的研究作者:潘健王俊汤才刚来源:《现代电子技术》2008年第01期摘要:倒立摆系统被广泛应用于检验各种控制理论和控制策略的有效性中。
分析了两种简单而有效的控制策略:极点配置法和线性二次最优控制策略的LQR法,并通过Matlab仿真对单极倒立摆系统进行了控制效果的对比,从理论和仿真结果上讨论了这两种控制策略的优缺点。
关键词:倒立摆;极点配置法中图分类号:TP273 文献标识码:A文章编号:Study of the Two Control Strategies Based on the Inverted Pendulum(School of Electrical & Electronic Engineering,Hubei University ofTechnology,Wuhan,430068,China)Abstract:Inverted pendulums are widely used to verify some qualities and effect of certain control theory or method.The paper analyses the two single and effective control strategies:the pole-placement method and the optimization strategies of LQR method.We compare the control results of the single inverted pendulum system with the two control strategies by the Matlab experiment.The paper points out the advantage and disadvantage between the two different methods through theories and the results of the Matlab experiment.Keywords:inverted pendulum;pole-placement method;LQR;Matlab1 引言倒立摆系统是一种绝对不稳定、高阶次、多变量、强耦合的非线性系统,是控制理论研究中理想的实验对象,他为控制理论的教学、实验和科研构建了一个良好的实验平台,促进了控制新理论和新思想的发展。
基于LQR控制的二级倒立摆系统研究作者:牛娟031210308王晨琳031210307王鹤彬031210312 学院:自动化指导老师:王晶、陆宁云摘要倒立摆系统是一种高阶次、不稳定、多变量、非线性、强耦合的系统,是进行控制理论研究的典型实验平台。
本文采用最优控制的方法设计二级倒立摆系统的控制器。
首先简要介绍了倒立摆以及倒立摆的几种常见控制方法,着重介绍了最优控制理论,其次对二级倒立摆系统进行了数学建模,最后对线性二次型最优控制原理进行了分析并使用MATLAB进行了仿真。
关键词:二级倒立摆,最优控制目录一、绪论 (3)1.1、倒立摆系统简介 (3)1.2、倒立摆系统的控制算法 (3)1.3、小结 (4)二、直线倒立摆的建模 (4)2.1、直线二级倒立摆的建模 (4)2.2、直线二级倒立摆的定性分析 (6)三、基于MATLAB的LQR仿真 (9)3.1、最优控制(LQR)简介 (9)3.2、线性二次型最有调节器原理 (9)3.3、MATLAB仿真 (10)3.4、SIMULINK仿真 (11)四、结束语 (13)4.1、小结 (13)4.2、未解决问题展望 (13)五、附录 (13)一、绪论1.1、倒立摆系统简介倒立摆系统是一种高阶次、不稳定、多变量、非线性、强耦合的系统,是进行控制理论研究的典型实验平台。
许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来。
在控制理论发展的过程中,某种控制理论的正确性及可行性需要通过设计一个控制器去控制一个典型的控制对象去加以验证。
倒立摆系统正是这样一种比较典型的控制对象。
最简单的倒立摆可由一个可在水平轨道上自由移动的小车和倒置摆铰链组成。
倒立摆的种类繁多,分类方法也多种多样:按结构来分有直线倒立摆,环形倒立摆,平面倒立摆;按级数来分有一级摆,二级摆,三级摆乃至更高级摆;按运动轨道来分有水平轨道倒立摆,倾斜轨道倒立摆;按控制电机数目来分有单电机倒立摆,多电机倒立摆。
基于参数优选法LQG最优控制的倒立摆控制
刘方霆;刘危
【期刊名称】《工业控制计算机》
【年(卷),期】2013(026)009
【摘要】为了实现对单级倒立摆系统的控制,提出了一种基于LQG(线性二次型高斯控制)的倒立摆系统控制方法.利用LQR(线性二次最优)构建系态反馈矩阵,再结合Kalman滤波器,综合得到了LQG控制器,并对该控制器的参数进行了优化设计.通过MATLAB仿真,验证了采用的控制算法能够有效地对单级倒立摆系统进行控制,系统超调量较小,并具有一定的鲁棒性.
【总页数】3页(P55-57)
【作者】刘方霆;刘危
【作者单位】空军预警学院研究生管理大队,湖北武汉430019;空军预警学院五系,湖北武汉430019
【正文语种】中文
【相关文献】
1.二级倒立摆的 LQG 最优控制研究 [J], 苏航
2.三级倒立摆的LQG最优控制应用研究 [J], 叶建斌;郭鸿武
3.基于线性二次型最优控制器的平行双倒立摆系统稳定控制 [J], 戚东东;张春;张传松;谭子良
4.基于SimMechanics的单级倒立摆最优控制算法研究 [J], 方鹏;王旭;匡毅
5.基于嵌入式控制器的直线倒立摆最优控制研究 [J], 刘翔;王中杰
因版权原因,仅展示原文概要,查看原文内容请购买。