基于LQR的一阶倒立摆最优控制系统研究
- 格式:docx
- 大小:135.05 KB
- 文档页数:9


摘要倒立摆是一种复杂、时变、非线性、强耦合、自然不稳定的系统,许多抽象的控制理论概念都可以通过倒立摆实验直观的表现出来。
因此,倒立摆系统经常被用来检验控制策略的实际效果,也广泛用于高年级本科生的实验教学,是现代控制理论研究与教学中的一种较为理想的实验设备。
本课题利用牛顿法对直线一级倒立摆的小车和摆杆部分进行理论建模和分析;在此基础上采用线性二次型最优控制方法(LQR)设计倒立摆的控制器;并且应用MATLAB 软件对系统进行理论仿真,以达到较好的控制效果;最后,本文通过直线一级倒立摆实物调试平台验证该方案的可行性。
关键词:直线一级倒立摆;建模;线性二次型最优控制AbstractInverted pendulum is a complex, time-dependent, nonlinear, strong coupling, system with natural instability, through the experiment of which many control theory of abstract concepts can be manifested intuitively. Therefore, the control of inverted pendulum system is often used to test strategies in action and undergraduate experimental teaching in higher grade, making it ideal experiment equipment in the study and teaching of modern control theory.This design maintain theoretical modeling and analysis of the wagon and the pendulum part on the straight-line one-level inverted pendulum by Newton's method, based on which the controller is designed for inverted pendulum using linear quadratic optimal control method; and the software MATLAB is used to get theoretical simulation, in order to achieve better control effect. Finally, the design validates the feasibility of this scheme using a straight-line one-level inverted pendulum debugging platform.Keywords: straight-line one-level inverted pendulum; modeling; linear quadratic optimal control目录第一章绪论 (1)1.1问题的提出及研究意义 (1)1.1.1 问题的提出 (1)1.1.2 研究意义 (1)1.2本论文主要研究的内容 (2)第二章单级倒立摆数学模型 (3)2.1倒立摆系统的组成 (3)2.2倒立摆系统的工作原理 (3)2.3直线一级倒立摆模型的数学建模 (4)2.4直线一级倒立摆系统的定性分析 (8)2.4.1 稳定性、能控性和能观性判据 (8)2.4.2 基于状态方程的系统定性分析 (9)第三章一级倒立摆控制器的设计及理论仿真 (11)3.1基于LQR的一级倒立摆最优控制系统理论分析 (11)3.2LQR控制器的设计与仿真 (12)第四章一级倒立摆的实物调试 (15)4.1倒立摆系统的组成及工作原理 (15)4.1.1 系统组成 (15)4.1.2 系统主要硬件电路及功能说明 (16)4.2实验结果 (18)结论 (20)参考文献 (22)谢辞 (23)第一章绪论1.1 问题的提出及研究意义1.1.1 问题的提出杂技顶杆表演之所以为人们熟悉,不仅是其技艺的精湛,更重要的是其物理与控制系统的稳定性密切相关。

LQR在单级倒立摆系统中的应用【摘要】单级倒立摆控制是一个即复杂而又对准确性、快速性要求很高的非线性不稳定系统控制问题。
单级倒立摆数学模型的建立对研究其稳定性具有指导作用。
针对多变量、非线性、强耦合性的倒立摆系统,运用牛顿动力学方法建立其动力学方程,并进行线性化处理,得到状态空间模型。
然后对该模型分别进行LQR控制,在MATLAB环境下进行仿真。
实验结果表明,二次型最优控制具有良好的响应性能和算法简单等特点,在实际应用中具有重要意义。
【关键词】单级倒立摆;线性二次型;最优控制;MATLABpplication of LQR in Single Inverted Pendulum SystemGao Xiaoqin,Shen Xiaolin(School of Computer and Control Engineering,North University of China,Taiyuan 030051,China)Abstract:Single-stage inverted pendulum control is a nonlinear and unstable system control problem that is complicated and of high accuracy and rapidity remands.The mathematical model of single stage inverted pendulum have guidance to study its stability.For multi-variable,nonlinear,strong coupling inverted pendulum system,using Newtonian dynamics method to establish the dynamic equation,and linearization processing to get the state space model.Then using LQR control the model of respectively,under the environment of MATLAB simulation.The experimental results show that quadratic optimal control has the characteristics of good response performance and the algorithm is simple,it is of great significance in practical application.Keywords:ingle Inverted Pendulum;LQR;optimum control;MATLAB1.引言单级倒立摆是一种典型的多变量、非线性、强耦合的不稳定系统,对它的研究可归结为对多变量非线性系统的研究,具有一定的理论价值[1]。

基于LQR控制的一级倒立摆MATLAB仿真研究龙源期刊网 /doc/cb13039548.html,基于LQR控制的一级倒立摆MATLAB仿真研究作者:潘俊朋桑运晓吕国娜任保飞刘树骏来源:《科学与财富》2017年第25期摘要::本文首先通过分析单级倒立摆系统建立相应的状态空间数学模型,然后对倒立摆系统进行LQR 控制器设计,最后使用Matlab 进行仿真,结果表明在本文加权矩阵Q、R 的取值下,LQR 控制器可使系统达到有效的控制,小车位置跟着摆杆的角度动作,系统具有较短的调整时间、较小的超调量和较好的动静态性能。
关键词:倒立摆 Matlab LQR 控制一、前言单级倒立摆系统是一种不稳定、多变量且具有强耦合的非线性系统。
如果把它当做一个单输出系统来处理将无法到达控制要求,所以对于这样的多输出系统,我们需要用到状态空间数学模型来对其进行分析。
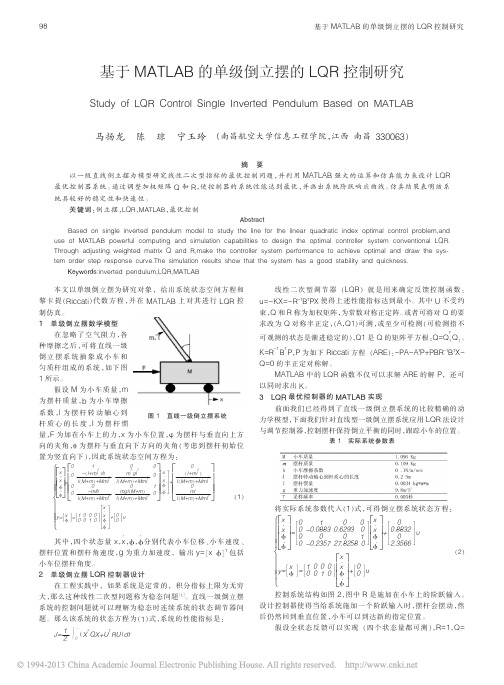
二、建立系统的状态空间数学模型为了方便而又不失精确的对单级倒立摆系统建立数学模型,实际中忽略一些次要的因素后的一级倒立摆系统简图如图1所示,系统受力分析如图2所示。
定义各参数:作用在小车的外力用F表示;摆杆与垂直向上方向的夹角用φ表示;摆杆与垂直向下方向的夹角用θ表示;采样时间为T=0.005s;摆杆的质量为m=0.2kg;摆杆的惯量为I=0.006kg*m*m;摆杆转动轴心到摆杆质心的距离为l=0.3m;小车的摩擦系数为b=0.1N/m/sec;小车的质量为M=0.5kg;小车的位置用x表示。
应用Newton方法来建立系统的动力学方程并经过整理后得到系统状态空间方程:三、LQR控制器设计及其Matlab仿真为了同时对小车的位置和摆杆的角度都进行有效控制,我们使用线性二次性最优控制算法(LQR)。
这种控制算法在现代控制理论中占有举足轻重的地位,通过多年的研究,使最优控制算法得到越来越广泛的工程应用。
LQR控制系统框图如图3所示。
其中R是作用于小车的阶跃信号,四个状态量和分别代表小车的位移和速度、摆杆的位置和角速度。
摘要倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统,许多抽象的控制理论概念都可以通过倒立摆实验直观的表现出来。
因此,倒立摆系统经常被用来检验控制策略的实际效果。
应用上,倒立摆广泛应用于航空航天控制、机器人,杂项顶杆表演等领域,研究倒立摆的精确控制对工业复杂对象的控制也有着重要的工程应用价值。
本文以固高公司生产的GIP-100-L型一阶倒立摆系统为研究对象,对直线一级倒立摆模型进行了建模,控制算法的仿真对比,并得出了相应的结论。
文中介绍了倒立摆的分类、特性、控制目标、控制方法等以及倒立摆控制研究的发展及其现状。
利用牛顿力学方法推到了直线以及倒立摆的动力学模型,求出其传递函数及其状态空间方程。
在建立了系统模型的基础下,本文还研究了倒立摆系统的线性二次型最优控制问题,并且使用了MATLAB软件进行仿真,通过改变LQR模块及状态空间模块中的参数,在仿真中取得了不同的控制效果,最终得到了最好的控制效果。
关键字:一级倒立摆线性系统、数学建模、最优控制、LQR、仿真目录1 一阶倒立摆的概述 (1)1.1倒立摆的起源与国内外发展现状 (1)1.2倒立摆系统的组成 (1)1.3倒立摆的分类: (1)1.4倒立摆的控制方法: (2)2.一阶倒立摆数学模型的建立 (3)2.1概述 (3)2.2数学模型的建立 (4)2.4实际参数代入: (5)3.定量、定性分析系统的性能 (7)3.1对系统的稳定性进行分析 (7)3.2 对系统的能空性和能观测性进行分析: (8)4.线性二次型最优控制设计 (9)4.1线性二次最优控制简介 (9)4.2 直线一级倒立摆LQR控制算法 (10)4.3 最优控制MATLAB仿真 (18)总结 (21)参考文献 (22)1 一阶倒立摆的概述1.1倒立摆的起源与国内外发展现状倒立摆的最初研究开始于二十世纪五十年代,麻省理工学院的控制理论专家根据火箭助推器原理设计出来一级倒立摆实验设备。
基于LQR 的一阶倒立摆最优控制系统研究“最优控制”大作业【摘要】介绍了最优控制基本概念和原理,分析了最优控制国内外现状。
针对线性二次型最优控制问题,以一阶倒立摆为对象,详细设计了LQR 最优控制器。
仿真表明,该控制器具有方法简单、便于实现的优点,在响应速度和控制效果方面优于传统的PID 控制。
【关键词】最优控制; 倒立摆; LQR; PID 控制1最优控制基本概念与原理1.1最优控制简介最优控制理论是现代控制理论的核心。
近50年来,科学技术的迅速发展,对许多被控对象,如宇宙飞船、导弹、卫星和现代工业设备的生产过程等的性能提出了更高的要求,在许多情况下要求系统的某种性能指标为最优[1]。
这就要求人们对控制问题都必须从最优控制的角度去进行研究分析和设计。
最优控制问题就其本质来说,乃是一变分问题,而经典变分理论只能解决一类简单的最优控制问题。
为了满足工程实践的需要,20世纪50年代中期,出现了现代变分理论,其中最常用的方法是极大值原理和动态规划,这两种方法成为了目前最优控制理论的两个柱石[1,2]。
最优控制在被控对象参数已知的情况下,已经成为设计复杂系统的有效方法之一。
1.2最优控制问题求解方法最优控制可分为静态最优和动态最优两类[3]。
(1)静态最优是指在稳定工况下实现最优,它反映系统达到稳定后的静态关系。
系统中各变量不随时间变化,而只表示对象在稳定工况下各参数之间的关系,其特性用代数方程来描述。
大多数的生产过程受控对象可以用静态最优控制来处理,并且具有足够的精度。
静态最优控制一般可用一个目标函数J=f(x)和若干个等式约束条件或不等式约束条件来描述,要求在满足约束条件下使目标函数J 为最大或最小。
静态最优问题的目标函数是一个多元普通函数,求解静态最优控制问题经常采用经典微分法、线性规划、分割法(优选法)和插值法等。
(2)动态最优是指系统从一个工况变化到另一个工况的变化过程中,应满足最优要求。
在动态系统中,所有的参数都是时间的函数,其特性可用微分方程或差分方程来描述。
动态最优控制要求寻找出控制作用的一个或一组函数而不是一个或一组数值,使性能指标在满足约束条件下为最优值。
这样,目标函数不再是一般函数,而是函数的函数。
因此在数学上这是属于泛函求极值的问题。
根据以上最优控制问题的基本组成部分,动态最优控制问题的数学描述为:在一定的约束条件下,受控系统的状态方程x (t)=f[x (t ),u (t ),t] (1) 和使目标函数J [u (·)]=Φ[x(t f ),t f ]+∫L[x (t ),u (t ),y]dt tf t 0 (2) 为最小的最优控制向量u ∗(t)。
动态最优问题的目标函数是一个泛函,当控制无约束时,采用经典微分法或经典变分法;当控制有约束时,采用极大值原理或动态规划;如果系统是线性的,性能指标是二次型形式的,则可采用线性二次型最优控制问题求解。
1.3最优控制线性二次型理论对于线性系统,若取状态变量和控制变量的二次型函数的积分作为性能指标函数,则这种动态系统最优问题成为线性系统二次型性能指标的最优控制问题,简称线性二次型最优控制问题[4]。
由于线性二次型问题的最优解可以写成统一的解析表达式和实现求解过程的规范化,且可导致一个简单的线性状态反馈控制率,易于构成闭环最优反馈控制,便于工程实现,因而在实际工程问题中得到了广泛的应用。
设给定线性定常系统的状态方程为X AX BU =+Y CX DU =+二次型性能指标函数:[]d t RU U QX X J T T ⎰∞+=021 式中,X 为n 维状态向量,U 为r 维输入向量(控制向量),Y 为m 维输出向量,A ,B ,C ,D 分别是n n ⨯,r n ⨯,n m ⨯,r m ⨯维常数矩阵。
加权阵Q 和R 是用来平衡状态向量和输入向量的权重。
如果系统受到外界干扰而偏离零状态,应施加怎样的控制U ,才能使系统回到零状态附近同时满足J 达到最小,那么这时的U 就称之为最优控制。
由最优控制理论可知,使式(5)取得最小值的最优控制律为:*1T U R B PX KX -=-=-式中P 是Riccati (黎卡提)方程的解,K 是线性最优反馈增益矩阵。
这时只需求解代数Riccati 方程: 10T T A P PA PBR B P Q -+-+=就可获得P 值以及最优反馈增益矩阵K 值。
[]11234,,,T T K R B P k k k k -==2最优控制国内外现状2.1最优控制研究现状在当前的控制系统领域中,有几种最优控制方法应用的比较广泛,下面就将这些最优控制的方法和研究现状做一个简单的介绍。
(1)神经网络优化神经网络优化方法的研究适用于判断网络的稳定性,主要是起源于Hopfield 引入Lyapuov 能量函数来判断的。
根据神经网络的理论,对应于系统稳定平衡点的是神经网络能量函数的极小点,这样我们就可以根据求系统的平衡点来求解能量函数的极小点。
要最终达到系统的平衡点也就是函数的极小值,就需要随着时间的变化,函数的运动轨迹是朝着能量函数减小的地方偏。
我们可以考虑将能量函数的较小点看成是网络动力系统的稳定吸引子,这样就可以使系统达到所期望的极小。
神经网络优化算法的基本原理就是将全局优化的理论用到控制系统中,并将木变函数达到我们所期望的值,也就是最小点[5]。
(2)鲁棒控制(3) (4)(5)(6)(7)鲁棒控制的理论主要是研究不确定性系统,通过对不确定性系统的控制系统的设计方案来描述系统。
在鲁棒控制理论的应用领域内,还可以对鲁棒控制系统的分析和设计方法等领域进行研究。
鲁棒控制理论发展的最突出的标志之一是H∞控制。
H∞控制从本质上可以说是频域内的最优控制理论。
鲁棒控制与最优控制结合解决许多如线性二次型控制、电机调速、跟踪控制、采样控制、离散系统的镇定、扰动抑制等实际问题[6]。
(3)预测控制预测控制的本质特征是预测模型,反馈校正和滚动优化,又称为基于模型的控制。
预测控制是一类新的优化控制算法[7]。
(4)混沌优化控制混沌优化控制的本质特征是其运动的路线是不稳定的,并且对扰动等外界干扰因素非常的敏感。
混沌运动是指不需要添加其他任意的一些随机因素,确定性非线性系统就可出现所期望的随机行为。
这种优化控制可以有效地避免系统陷入局部最小,因此混沌优化控制技术越来越受欢迎[8]。
2.2最优控制发展趋势2.2.1在线优化方法基于对象数学模型的离线优化方法,是一种理想化方法。
这是因为尽管工业过程(对象)被设计得按一定的正常工况连续运行,但是环境的变动、触媒和设备的老化以及原料成分的变动等因素形成了对工业过程的扰动,因此原来设计的工况条件就不是最优的。
解决此类问题的常见方法有(1)局部参数最优化和整体最优化设计方法局部参数最优化方法的基本思想是:按照参考模型和被控过程输出之差来调整控制器可调参数,使输出误差平方的积分达到最小。
这样可使被控过程和参考模型尽快地精确一致[9]。
(2)预测控制中的滚动优化算法预测控制,又称基于模型的控制(Model-based Control),是70年代后期兴起的一种新型优化控制算法[5]。
但它与通常的离散最优控制算法不同,不是采用一个不变的全局优化目标,而是采用滚动式的有限时域优化策略。
这意味着优化过程不是一次离线进行,而是反复在线进行的。
可把大系统控制中分层决策的思想和人工智能方法引入预测控制,形成多层智能预测控制的模式。
这种多层智能预测控制方法的,将克服单一模型的预测控制算法的不足,是当前研究的重要方向之一[10]。
(3)稳态递阶控制对复杂的大工业过程(对象)的控制常采用集散控制模式。
这时计算机在线稳态优化常采用递阶控制结构。
这种结构既有控制层又有优化层,而优化层是一个两级结构,由局部决策单元级和协调器组成。
由于工业过程较精确的数学模型不易求得,而且工业过程(对象)往往呈非线性及慢时变性,因此波兰学者Findesien提出:优化算法中采用模型求得的解是开环优化解。
在大工业过程在线稳态控制的设计阶段,开环解可以用来决定最优工作点[11]。
2.2.2智能优化方法对于越来越多的复杂控制对象,一方面,人们所要求的控制性能不再单纯的局限于一两个指标;另一方面,上述各种优化方法,都是基于优化问题具有精确的数学模型基础之上的。
但是许多实际工程问题是很难或不可能得到其精确的数学模型的。
这就限制了上述经典优化方法的实际应用。
随着模糊理论、神经网络等智能技术和计算机技术的发展。
(1)遗传算法[12]遗传算法和遗传规划是一种新兴的搜索寻优技术。
它仿效生物的进化和遗传,根据“优胜劣汰”原则,使所要求解决的问题从初始解逐步地逼近最优解。
在许多情况下,遗传算法明显优于传统的优化方法。
研究表明,遗传算法是一种具有很大潜力的结构优化方法。
它用于解决非线性结构优化、动力结构优化、形状优化、拓扑优化等复杂优化问题,具有较大的优势。
(2)模糊优化方法[13]最优化问题一直是模糊理论应用最为广泛的领域之一。
自从Bellman和Zadeh在20世纪70年代初期对这一研究作出开创性工作以来,其主要研究集中在一般意义下的理论研究、模糊线性规划、多目标模糊规划、以及模糊规划理论在随机规划及许多实际问题中的应用。
主要的研究方法是利用模糊集的a截集或确定模糊集的隶属函数将模糊规划问题转化为经典的规划问题来解决。
3 最优控制应用举例3.1一阶倒立摆系统倒立摆小车系统如图1所示。
在忽略了空气流动,各种摩擦之后,一阶倒立摆系统可抽象成小车和匀质杆组成的系统。
倒立摆系统最终的控制目标是使这样一个不稳定的被控对象,通过引入适当的控制方法使之成为一个稳定的系统[9]。
假设:M为小车质量;m为摆杆质量;l为摆杆转动轴心到杆质心的长度;I为摆杆的转动惯量;F为加在小车上的力;x为小车位置;θ为摆杆与垂直方向的夹角。
假定各项参数为M=1kg,m=0.1kg,l=1m,g=9.81m/s2。
图1 倒立摆系统受力分析图3.2 系统的数学模型运用牛顿动力学方法分别建立摆杆围绕其质心的转动运动方程、摆杆质心的水平运动方程、摆杆质心的垂直运动方程和小车的运动方程为: Ms̈+N =FN =ms̈+mlθcosθ−mlθ2sinθP −mg =−mlθsinθ−mlθ2cosθPlsinθ−Nlcosθ=Iθ整理后的方程组为:(M +m )s̈+mlθcosθ−mlθ2sinθ=F (I +ml )θ+mls̈c osθ−mglsinθ=0考虑到摆杆在设定点0=θ附近做微小的振动,对上式进行局部线性化,即用0sin ,1cos ≈≈θθ做近似处理后,可得(M +m)s̈+ml θ=F(I +ml 2)θ-mgl θ+ml s̈=0从而,推得传递函数为:θ(s)F(s)=ml qs 2s 4+43bml 2q s 3−(M+m)mgl q s 2−bmglq s 其中,q =[(M +m )(I +ml 2)]−(ml)2。