基于最优控制LQR的单级倒立摆系统仿真研究
- 格式:pdf
- 大小:870.86 KB
- 文档页数:4


基于LQR 的一阶倒立摆最优控制系统研究“最优控制”大作业【摘要】介绍了最优控制基本概念和原理,分析了最优控制国内外现状。
针对线性二次型最优控制问题,以一阶倒立摆为对象,详细设计了LQR 最优控制器。
仿真表明,该控制器具有方法简单、便于实现的优点,在响应速度和控制效果方面优于传统的PID 控制。
【关键词】最优控制; 倒立摆; LQR; PID 控制1最优控制基本概念与原理1.1最优控制简介最优控制理论是现代控制理论的核心。
近50年来,科学技术的迅速发展,对许多被控对象,如宇宙飞船、导弹、卫星和现代工业设备的生产过程等的性能提出了更高的要求,在许多情况下要求系统的某种性能指标为最优[1]。
这就要求人们对控制问题都必须从最优控制的角度去进行研究分析和设计。
最优控制问题就其本质来说,乃是一变分问题,而经典变分理论只能解决一类简单的最优控制问题。
为了满足工程实践的需要,20世纪50年代中期,出现了现代变分理论,其中最常用的方法是极大值原理和动态规划,这两种方法成为了目前最优控制理论的两个柱石[1,2]。
最优控制在被控对象参数已知的情况下,已经成为设计复杂系统的有效方法之一。
1.2最优控制问题求解方法最优控制可分为静态最优和动态最优两类[3]。
(1)静态最优是指在稳定工况下实现最优,它反映系统达到稳定后的静态关系。
系统中各变量不随时间变化,而只表示对象在稳定工况下各参数之间的关系,其特性用代数方程来描述。
大多数的生产过程受控对象可以用静态最优控制来处理,并且具有足够的精度。
静态最优控制一般可用一个目标函数J=f(x)和若干个等式约束条件或不等式约束条件来描述,要求在满足约束条件下使目标函数J 为最大或最小。
静态最优问题的目标函数是一个多元普通函数,求解静态最优控制问题经常采用经典微分法、线性规划、分割法(优选法)和插值法等。
(2)动态最优是指系统从一个工况变化到另一个工况的变化过程中,应满足最优要求。
在动态系统中,所有的参数都是时间的函数,其特性可用微分方程或差分方程来描述。
宁波理工学院哲尊方话衣投副案彼仿E题目基于LQR理论的直线单级倒立摆PID控制仿真项目成员 _____________ 蒋嘉楠、钱品武、刘元晟 __________ 专业班级 ________________ 自动化091 ___________________ 指导教师 ___________________ 垫I ______________________ 分院 _____________________ 信息分院___________________ 完成日期 ________________ 12年5月____________________*项目组成员 (2)1课程设计目的 (2)2课程设计题目描述和要求 (2)3课程设计报告内容 (2)3. 1、线性二次最优控制LQR基本理论 (2)3.2、系统状态方程 (3)3.3、程序代码 (4)3.4、系统调试和结果分析 (5)4 .总结 (7)5.参考书目 (7)项目组成员基于LQR理论的直线单级倒立摆控制仿真1. 课程设计目的设计倒立摆二次型最优控制器,通过MATLAB仿真和实际系统实验,实现对倒立摆的稳定控制。
建立模型,确定参数,进行控制算法设计、系统调试和分析等步骤实现。
2. 课程设计题目描述和要求仿真要求:对论文中的LQR理论进行验证,同时•通过控制变量对离散系统进行优化。
3. 课程设计报告内容3. 1、线性二次最优控制LQR基本理论LQR控制器是应用线性二次型最优控制原理设计的控制器。
它的任务在于,当系统状态由于任何原因偏离了平衡状态时,能在不消耗过多能量的情况下,保持系统状态各分量仍接近于平衡状态。
线性二次型最优控制研究的系统是线性的或可线性化的,并且性能指标是状态变量和控制变量的二次型函数的积分。
线性二次最优控制LQR基本原理为,由系统方程:X=AX+Bu 确定下列最佳控制向量的短阵K:u(t) = -K^X(t)使得性能指标达到最小值:J = [(X r QX +u r Ru)dt式中:Q-一正定(或正半定)厄米特或实对称阵;R-一为正定厄米特或实对称阵。
基于LQR控制的一级倒立摆MATLAB仿真研究龙源期刊网 /doc/cb13039548.html,基于LQR控制的一级倒立摆MATLAB仿真研究作者:潘俊朋桑运晓吕国娜任保飞刘树骏来源:《科学与财富》2017年第25期摘要::本文首先通过分析单级倒立摆系统建立相应的状态空间数学模型,然后对倒立摆系统进行LQR 控制器设计,最后使用Matlab 进行仿真,结果表明在本文加权矩阵Q、R 的取值下,LQR 控制器可使系统达到有效的控制,小车位置跟着摆杆的角度动作,系统具有较短的调整时间、较小的超调量和较好的动静态性能。
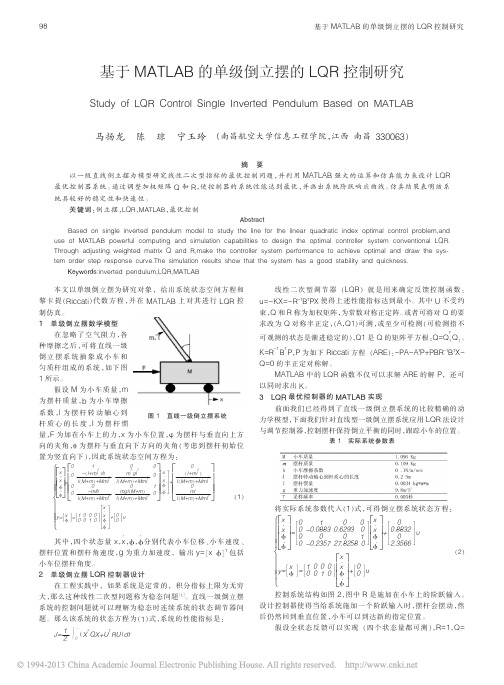
关键词:倒立摆 Matlab LQR 控制一、前言单级倒立摆系统是一种不稳定、多变量且具有强耦合的非线性系统。
如果把它当做一个单输出系统来处理将无法到达控制要求,所以对于这样的多输出系统,我们需要用到状态空间数学模型来对其进行分析。
二、建立系统的状态空间数学模型为了方便而又不失精确的对单级倒立摆系统建立数学模型,实际中忽略一些次要的因素后的一级倒立摆系统简图如图1所示,系统受力分析如图2所示。
定义各参数:作用在小车的外力用F表示;摆杆与垂直向上方向的夹角用φ表示;摆杆与垂直向下方向的夹角用θ表示;采样时间为T=0.005s;摆杆的质量为m=0.2kg;摆杆的惯量为I=0.006kg*m*m;摆杆转动轴心到摆杆质心的距离为l=0.3m;小车的摩擦系数为b=0.1N/m/sec;小车的质量为M=0.5kg;小车的位置用x表示。
应用Newton方法来建立系统的动力学方程并经过整理后得到系统状态空间方程:三、LQR控制器设计及其Matlab仿真为了同时对小车的位置和摆杆的角度都进行有效控制,我们使用线性二次性最优控制算法(LQR)。
这种控制算法在现代控制理论中占有举足轻重的地位,通过多年的研究,使最优控制算法得到越来越广泛的工程应用。
LQR控制系统框图如图3所示。
其中R是作用于小车的阶跃信号,四个状态量和分别代表小车的位移和速度、摆杆的位置和角速度。
摘要倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统,许多抽象的控制理论概念都可以通过倒立摆实验直观的表现出来。
因此,倒立摆系统经常被用来检验控制策略的实际效果。
应用上,倒立摆广泛应用于航空航天控制、机器人,杂项顶杆表演等领域,研究倒立摆的精确控制对工业复杂对象的控制也有着重要的工程应用价值。
本文以固高公司生产的GIP-100-L型一阶倒立摆系统为研究对象,对直线一级倒立摆模型进行了建模,控制算法的仿真对比,并得出了相应的结论。
文中介绍了倒立摆的分类、特性、控制目标、控制方法等以及倒立摆控制研究的发展及其现状。
利用牛顿力学方法推到了直线以及倒立摆的动力学模型,求出其传递函数及其状态空间方程。
在建立了系统模型的基础下,本文还研究了倒立摆系统的线性二次型最优控制问题,并且使用了MATLAB软件进行仿真,通过改变LQR模块及状态空间模块中的参数,在仿真中取得了不同的控制效果,最终得到了最好的控制效果。
关键字:一级倒立摆线性系统、数学建模、最优控制、LQR、仿真目录1 一阶倒立摆的概述 (1)1.1倒立摆的起源与国内外发展现状 (1)1.2倒立摆系统的组成 (1)1.3倒立摆的分类: (1)1.4倒立摆的控制方法: (2)2.一阶倒立摆数学模型的建立 (3)2.1概述 (3)2.2数学模型的建立 (4)2.4实际参数代入: (5)3.定量、定性分析系统的性能 (7)3.1对系统的稳定性进行分析 (7)3.2 对系统的能空性和能观测性进行分析: (8)4.线性二次型最优控制设计 (9)4.1线性二次最优控制简介 (9)4.2 直线一级倒立摆LQR控制算法 (10)4.3 最优控制MATLAB仿真 (18)总结 (21)参考文献 (22)1 一阶倒立摆的概述1.1倒立摆的起源与国内外发展现状倒立摆的最初研究开始于二十世纪五十年代,麻省理工学院的控制理论专家根据火箭助推器原理设计出来一级倒立摆实验设备。
一级直线倒立摆的控制策略与仿真分析一、引言倒立摆系统是研究控制理论的一种典型的实验装置,具有成本低廉,结构简单,参数和结构易于调整的优点。
然而倒立摆系统具有高阶次、不稳定、多变量、非线性和强耦合特性,是一个绝对不稳定系统。
倒立摆实物仿真实验是控制领域中用来检验某种控制理论或方法的典型方案,它对一类不稳定系统的控制以及对深入理解反馈控制理论具有重要意义。
倒立摆系统在研究双足机器人直立行走、火箭发射过程的姿态调整和直升机飞行控制领域中有重要的现实意义,相关的科研成果已经应用到航天科技和机器人学等诸多领域。
二、一级直线倒立摆模型的建立图1 一级直线倒立摆物理模型图2 小车和摆杆的受力分析图2.1 传递函数模型图1、2是系统中小车和摆杆的受力分析图。
设小车质量为M,摆杆质量为m,小车摩擦系数为b,摆杆转动轴心到杆质心的长度为l,摆杆的转动惯量为I,根据牛顿第二定律,可以得到系统的两个运动方程:F ml ml x b x m M =-+++∙∙∙∙∙∙θθθθsin cos )(2(1)θθθcos sin )(2∙∙∙∙-=++x m l m gl m l I (2)设φπθ+=, 假设φ与1(单位是弧度)相比很小,即c <<1,则可以进行近似处理:1cos -=θ,φθ-=sin ,0)(2=dtd θ。
用u 来代表被控对象的输入力F ,线性化后两个运动方程如下:2()()I ml mgl ml x M m x b x ml uϕϕϕ∙∙∙∙∙∙∙∙∙+-=++-= (3)假设初始条件为0,对式(3)进行拉普拉斯变换得到:22222()()()()()()()()()I ml s s mgl s mlX s s M m X s s bX s s ml s s U s +Φ-Φ=++-Φ=(4)由于输出为角度φ,求解方程组的第一个方程,可以得到:mgl s ml I mls s X s -+=Φ222)()()((5)令∙∙=x v ,则有:mgls ml I mls V s -+=Φ22)()()((6) 把上式代入方程组的第二个方程,得到:)()()(])([)(])()[(222222s U s s ml s s sg ml ml I b s s s g ml ml I m M =Φ-Φ+++Φ-++(7)整理后得到传递函数:232()()()()mlss qb I ml M m mgl bmgl U s s s s q q qΦ=+++--(8) 其中])())([(22ml ml I m M q -++=。
第27卷第4期 齐 齐 哈 尔 大 学 学 报 Vol.27,No.4 2011年7月 Journal of Qiqihar University July,2011单级倒立摆的结构简化模型基于最优控制LQR 的单级倒立摆系统仿真研究么洪飞,陆仲达,徐凤霞(齐齐哈尔大学 计算机与控制工程学院,黑龙江 齐齐哈尔 161006)摘要:单级倒立摆控制是一个即复杂而又对准确性、快速性要求很高的非线性不稳定系统控制问题。
在倒立摆系统数学模型的基础上,对系统进行了性能分析。
应用现代控制理论最优控制LQR方法对单级倒立摆系统进行仿真控制研究,仿真结果说明反馈控制理论对倒立摆系统的控制是有效的,无论是系统的输出还是各个状态变量都具有较好稳定性和一定的鲁棒性。
关键词:单级倒立摆;LQR;系统建模与仿真中图分类号:TP273 文献标识码:A 文章编号:1007-984X(2011)04-0034-04倒立摆系统是一个典型的非线性、多变量、强耦合和绝对不稳定的系统,倒立摆系统控制是个复杂的、对速度和准确要求很高的非线性且不稳定的系统控制,也一直是控制领域研究的热点问题,诸如镇定问题、非线性问题、鲁棒性问题、随动问题及跟踪问题等都可以以倒立摆为对象进行研究。
同时该对象的研究成果应用在火箭飞行控制以及机器人控制等领域。
所以对倒立摆系统的研究在理论上和工程实践中上均有着深远意义。
线性二次型最优控制设计是在状态空间技术的基础上设计一个最优的动态控制器——即LQR控制器。
线性二次型最优控制问题其目标函数是属于二次型形式的最优控制。
这种控制问题在现代控制理论中占有非常重要的地位,越来越受到控制界的高度重视,这是因为它的最优解具有标准的解析式,它不局限于某种特定物理系统,而且经过人们的多次实验,证明这样可以很容易获得解析解,且可以形成简单的线性状态反馈控制规律,容易构成最优反馈控制,在工程中便于实现,所以广泛应用于实际的工程问题中[1,2]。
本文针对单级倒立摆系统的平衡控制问题进行了研究,首先介绍基于动力学理论建立单级倒立摆的运动方程,经近似处理得到数学模型,设计并实现了基于最优控制理论的线性二次状态调节器( LQR )控制,对倒立摆的摆角和小车的位移进行控制,同时利用Matlab软件中Simulink对倒立摆的运动进行了仿真,并且对所获得的控制结果进行了分析。
1 单级倒立摆系统数学模型的建立单级倒立摆系统的物理模型可以描述为:在光滑水平平面上摆放着滑轨,在滑轨上放置着可以左右自由移动的小车,一根视为刚体的摆杆通过其底端的一个不计摩擦的固定端点与小车相连构成一个倒立摆。
单级倒立摆可以在平行于滑轨的范围内随意摆动。
倒立摆控制系统的目的是在系统的初始状态不为零时,由设计的控制器对小车作用一个力(控制量),使小车停在给定位置且倒立摆的摆杆仍然保持竖直向上状态。
当小车静止的情况下,由于受到重力的作用,导致倒立摆的稳定性发生不可逆转的破坏而使倒立摆无法复位,所以小车在平行于滑轨的方向上产生加速度。
根据牛顿力学原理,这里的作用力(控制量)与小车位移对时间的二阶导数存在线性关系,所以说单级倒立摆系统是一个非线性系统[2,4]。
在各种摩擦忽略不计之后,可将单级倒立摆系统抽象成小车和均匀质量摆杆组成的系统,单级倒立摆的结构简图如图1所示。
收稿日期:2011-4-21基金项目:黑龙江省教育厅科学技术研究项目(12511604)作者简介:么洪飞(1980-),男,黑龙江青冈人,助教,硕士,主要研究方向为智能控制、最优控制、计算机仿真等,yaohf520@第4期 基于最优控制LQR 的单级倒立摆系统仿真研究 ·35·设小车质量为M ,摆杆质量为m ,摆杆长为l ,F 为作用于小车上的外力,μ为小车摩擦系数,I 为摆杆转动惯量,x 为小车的位移,摆杆角度为θ,重力加速度为g 。
在建立数学模型之前,先进行几点假设:(1)将倒立摆的摆杆视为质量分布均匀的刚体;(2)除小车与滑轨之间的摩擦外其它摩擦力可以忽略。
通过对倒立摆分析,可得如下系统动力学方程组2()0.5sin 0.5cos M m x ml ml F θθθθ+−+= 210.5cos 0.5sin 03ml mlx mgl θθθ+−= 显然,这是一个非线性方程组。
为了便于对控制器的设计需要将该方程组进行线性化。
考虑倒立摆动态过程中摆角在平衡点0θ=处附近的微小变化。
则有20sin cos 1,,θθθθ≈≈≈ ,即方程组可简化为:()0.5M m x ml F θ++= 210.50.503ml mlx mgl θθ+−= 令作用力、位移与角度参数为时间的函数有 []2()()()t F t M m x mlθ=−+ []2()()()032l ml F t M m x x g θ−++−= 于是最终得到方程组为 43()()()44gm x t F t t m M m Mθ=−++ 66()()()()(4)(4)g m M t F t t l m M l m M θ+=−+++ 即系统的状态变量为T ()(),,,,X x x u F t θθ== ,则系统状态空间表达式为{x Ax Bu y Cx =+= ,代入仿真数据取 1.00kg 0.10kg,,M m == 20.5m 9.8m ,l g ==后得到系统的状态空间数学模型为0100031.550000 2.927000100.7170000.976u x x xx θθθθ⎛⎞⎛⎞⎛⎞⎛⎞⎜⎟⎜⎟⎜⎟⎜⎟−=+⎜⎟⎜⎟⎜⎟⎜⎟⎜⎟⎜⎟⎜⎟⎜⎟−⎝⎠⎝⎠⎝⎠⎝⎠ 以小车位移x 和摆角θ为输出变量的系统的输出方程式为()()()1000000100y u x x x θθθ⎛⎞⎜⎟==+⎜⎟⎜⎟⎝⎠ 其中得到()0100031.550000 2.9271000()0001000100.7170000.976,,,A B C u F t ⎛⎞⎛⎞⎜⎟⎜⎟−====⎜⎟⎜⎟⎜⎟⎜⎟−⎝⎠⎝⎠ 2 线性二次型最优控制器设计控制器设计的前提主要看系统是否能控,所以在设计控制器之前要进行能控性分析。
可以由能控性矩阵23M B AB A B A B =⎡⎤⎣⎦的秩来判断是否能控,或利用Matlab中可控性矩阵的ctrb命令来计算,可以得出Rank()4M =,可知单级倒立摆系统是可控的,因此可以对倒立摆系统进行LQR控制器的设计,使该系统稳定。
线性二次型最优控制是一种应用较多的最优控制系统设计方法,其对象是现代控制理论中以状态空间形式给出的线性系统,线性二次型最优设计指旨在寻求最优控制()u t ,使二次型目标函数 J 取最小值[5,6]。
·36· 齐 齐 哈 尔 大 学 学 报 2011年LQR最优控制系统结构框图 根据单级倒立摆系统的状态方程,由于终端时间f t =∞,系统的二次型性能指标为 f 0T T 1()()()()d 2t t J e t Qe t u t Ru t t =+⎡⎤⎣⎦∫ 式中:()()r e t y y t =−,r y 为系统期望输出;Q ,R 分别为输出误差变量和输入变量的加权矩阵,决定了系统误差与控制能量消耗之间的相对重要性(Q 为半正定对称矩阵;R 为正定对称矩阵)。
找一状态反馈控制律:()()u t Kx t =−,使得二次型性能指标最小化。
为使J 最小,由最小值原理得到最优控制为*1T ()()()u t R B P t x t −=−式中:矩阵()P t 为微分Riccatti 方程:T 1T ()()()()()P t P t A A P t P t BR B P t Q −=−−+−的解。
如果令终止时间f t =∞,()P t 为一个常数矩阵,且()0P t =,即Riccatti 方程简化为T 1T ()()()()0P t A A P t P t BR B P t Q −−−+−=对于最优反馈系数矩阵1T ()K R B P t −=。
Matlab 仿真软件控制系统工具箱中提供了解决线性二次型最优控制问题的函数,可使用(,,,)lqr A B Q R 命令来求取K 。
由于输入变量u 为一维向量,所以R 为11×维矩阵,可取1R =;这里关键是选择加权矩阵Q , 一般Q 越大, 系统达到稳态所需时间越短,反之亦然,这里经过多次仿真,选择下面的Q 值比较理想。
50000000000010000000Q ⎛⎞⎜⎟=⎜⎟⎜⎟⎝⎠该系统线性二次型最优状态反馈矩阵为()54.9169.10110.0009.489k =−−−−图2为LQR最优控制系统结构图,其中()n t 为外界作用在小车上的力, 是一个脉冲输入;()u t 为LQR控制器输出的控制力;()v t 为作用在小车上的合力。
3 倒立摆系统仿真分析根据上面得到的数据,利用Matlab软件中Simulink对倒立摆的运动进行仿真[7,8]。
Q 和R 矩阵用来平衡系统对输入量和状态量的感应程度,通过调整矩阵Q 和R 来获得满意的响应效果。
经过多次仿真试凑,可以使系统能够准确地跟踪阶跃输入信号,摆杆的角度的超调量足够小,稳态误差很小、上升时间与调整时间也比较短。
倒立摆摆角和小车位移的仿真结果如图3和图4所示。
这时如果继续再增大Q ,系统的响应性能还会有更近一步的改善,除了保证Q 足够小还要兼顾其它指标,系统响应性能已经足够了。
图3 倒立摆摆角仿真响应曲线 图4 小车位移仿真响应曲线第4期 基于最优控制LQR的单级倒立摆系统仿真研究 ·37·4 结束语在单级倒立摆数学模型的基础上,设计了LQR控制器并进行了仿真,证明了设计的控制器的有效性,LQR控制可以比较好地控制住摆杆且响应速度较快、超调量较小。
LQR最优控制方法能够使目标函数具有最优解,可以提高闭环系统的相对稳定性或者使不稳定系统得以稳定,系统具有良好的稳定性和鲁棒性,同时分析了加权矩阵Q和R对系统性能指标的影响。
研究结果表明,使用线性二次型最优控制器(LQR)对单级倒立摆的运动有较好的控制,可以达到最优控制的目的,而且具有较优的稳态特性,适应性较强,因此有进一步研究和推广的必要性。
参考文献[1] KHALIL SULTAN. Inverted Pendulum-Analysis, Design and Implementation[M]. Pakistan:CSIR IIEE,2005.[2] 王仲民,孙建军,岳宏. 基于LQR的倒立摆最优控制系统研究[J]. 工业仪表与自动化装置,2005(3):6-9.[3] 丛爽,张冬军,魏衡华. 单级倒立摆三种控制方法的对比研究[J]. 系统工程与电子技术,2001,23(11):47.[4] 黄丹,周少武,吴新开,等. 基于LQR最优调节器的倒立摆控制系统[J]. 微计算机信息,2004(20):37-38.[5] 符曦. 系统最优化及控制[M]. 北京:机械工业出版社,1995.[6] 蔡寿康,张正方. 最优控制[M]. 北京:电子工业出版社,1984.[7] 张晓华. 控制系统数字仿真与CAD[M]. 2版. 北京:机械工业出版社,2005.[8] 王士莹,张峰,陈志勇,等. 直线一级倒立摆的LQR控制器设计[J]. 信息技术,2006,35(6):98-99.Simulation study for a single inverted pendulum system based on optimal control LQRYAO Hong-fei,LU Zhong-da,XU Feng-xia(College of Computer and Control Engineering,Qiqihar University,Heilongjiang Qiqihar 161006,China)Abstract:The single inverted pendulum control system is an inherent instable nonlinear and complex dynamic system which needs high accuracy and speed. On the basis of the model of the single inverted pendulum , this paper analyzes the capability of the system. Basing on modern control theories, the LQR control methods of inverted pendulum system is discussed. Feedback control theory is useful for s ingle inverted pendulum control system according to the simulation,regardless of the system output or every state variable, in the function of the digital optimal controller.Key words: single inverted pendulum;LQR;system modeling and simulation。