石家庄国际机场二次雷达天线电机监控系统设计及功能实现
- 格式:doc
- 大小:28.50 KB
- 文档页数:5
研究Technology StudyI G I T C W 技术24DIGITCW2021.040 引言我国民航事业迅猛发展,航班量显著增长。
以云南管制区为例,随着昆明长水国际机场投入运行,旅客及货邮翻倍增加,云南空中管制安全保障压力日益增长。
在巨大的航班量和安全压力下,稳定可靠的雷达监视信号质量对管制部门就至关重要了。
目前,全国有22套西班牙INDRA 公司20 MP/L MODE-S 单脉冲二次雷达应用在空管系统,仅云南管制区就有3套。
对该雷达目标速度相关故障分析及排查,对类似问题排查可提供思路及借鉴。
1 I ndra 二次雷达目标速度跳变情况概述云南某雷达站Indra 二次雷达在S 模式和A/C 模式下均出现部分目标速度跳变情况,该站点切换雷达工作通道故障现象无改善。
雷达目标速度跳变范围从20 Nm/h 至1 200 Nm/h 随机出现,其中,个别雷达目标除航班速度跳变外,还出现目标分裂、位置倒退的情况。
如图1所示。
2 二次雷达目标速度测算原理航迹跟踪是基于天线扫描到扫描之间的航迹和点迹之间的相关处理实现的。
不断测量一个目标的位置,将点迹和航迹文件中的航迹进行相关处理,并进行平滑滤波,才能连成航迹[1]。
继而计算出目标的速度和航向,外推出航迹的未来位置,这一系列的处理称之为跟踪。
能够在天线不断扫描过程中对几十批或更多的目标实行跟踪,是边跟踪边扫描(Tracks-While-Scan )系统的任务。
完成跟踪后,计算出目标速度。
简单理解为在一个更新周期(4 s )内前后两个点之间的位移量(距离矢量)与更新周期(4 s )的比值即为速度。
3 故障排查思路3.1 航迹跟踪处理部分排查根据二次雷达测速原理,首先排查航 迹跟踪处理相Indra 二次雷达速度跳变分析处理徐晓强(民航云南空管分局,云南 昆明 650200)摘要:通过对航管二次雷达速度构成要素入手,分析排除一例Indra 二次雷达速度跳变。
• 104•ELECTRONICS WORLD ・探索与观察浅谈二次雷达天线原理民航福建空管分局 陈 翰【摘要】二次雷达通常使用的是垂直大孔径天线,不同设备厂家所提供的雷达天线型号也是不尽相同。
但这些天线在工作原理上都大同小异,掌握其中通用的内容,就可以很快地学习不同厂家的天线。
【关键词】二次雷达;天线;垂直大孔径1.引言航管二次雷达是通过地面的询问机向航空器发射1030MHz 询问信号,安装有应答机的航空器接收到询问后回返回一个1090MHz 应答信号,雷达设备再接收应答信号来检测、识别目标的方位与距离。
2.二次雷达的工作原理二次雷达的信息交换,是通过将上行询问内容和下行应答内容进行脉冲编码来实现的。
按照ICAO 规范,传统空管二次雷达的询问模式共有6种,分别为1、2、3/A 、B 、C 、D 模式。
实际在民用航空中常用的是3/A 、C 两种模式。
这两种模式主要区别在于P1与P3的时间间隔不同。
P1~P3间隔是指P1和P3的0.5电平处脉冲前沿之间的间隔,其中3/A 模式下,间隔为8us ,C 模式下间隔为21us 。
P1、P2、P3的0.5电平脉冲宽度均为0.8us ,脉冲前沿宽度均为0.05~1us ,脉冲后沿均为0.05~0.2us 。
询问时,可以根据需要,只发射单一模式询问信号也可以各种模式交错询问。
3.天线基本理论天线的具体形式繁多,有多种分类方法,但是其中的基本理论,分析方法以及典型天线的工作原理与点特性却是相通的。
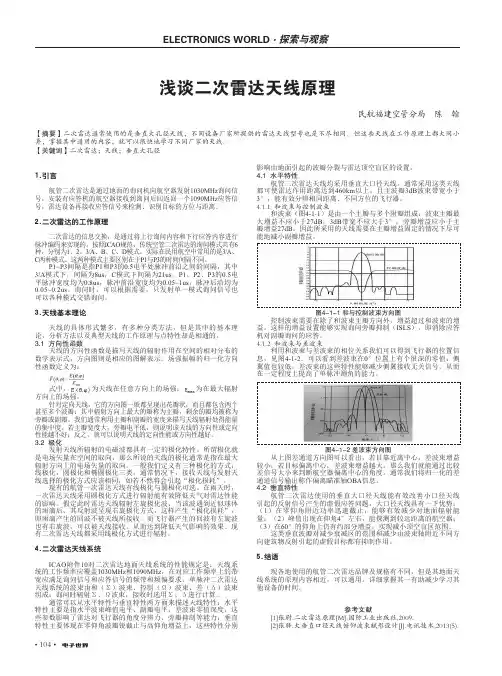
3.1 方向性函数天线的方向性函数是描写天线的辐射作用在空间的相对分布的数学表示式,方向图则是相应的图解表示。
场强振幅的归一化方向性函数定义为:式中,为天线在任意方向上的场强;为在最大辐射方向上的场强。
针对定向天线,它的方向图一般都呈现出花瓣状,而且都包含两个甚至多个波瓣:其中辐射方向上最大的瓣称为主瓣,剩余的瓣均被称为旁瓣或副瓣。
我们通常利用主瓣和副瓣的宽度来描写天线辐射处得能量的集中度。
对民航空管二次雷达系统安全运行的电磁环境分析民航空管二次雷达系统是一种用于航空交通管制的重要工具,它通过向飞机发送无线电波,并接收被飞机反射回来的信号来实现对飞机位置和飞行状态的监测。
在保证民航空管二次雷达系统安全运行的过程中,电磁环境分析具有重要意义。
本文将对民航空管二次雷达系统安全运行的电磁环境进行分析。
民航空管二次雷达系统需要在一定的频率范围内进行工作。
根据国际民航组织(ICAO)的相关规定,民航二次雷达的工作频率一般在1030-1090MHz的范围内。
在电磁环境分析中,需要考虑该频率范围内的干扰源情况。
可能存在的干扰源包括其他交通雷达系统、无线电通信设备、雷达干扰装置等。
这些干扰源可能会影响到民航空管二次雷达系统的正常工作,因此需要对干扰源进行监测和管理,以确保系统的安全运行。
民航空管二次雷达系统在工作过程中还需要考虑雷达信号的传播路径和传播损耗。
雷达信号的传播路径通常是水平传播,但也会受到地面效应和天气条件的影响。
地面效应包括地形、建筑物等因素,可能会导致信号的反射、衍射和散射,从而影响到雷达信号的强度和质量。
天气条件如大气湍流、降水等也会对雷达信号传播产生影响。
在电磁环境分析中,需要考虑地面效应和天气条件对雷达信号传播的影响,并采取相应的措施来抵消传播损耗,以确保雷达信号的可靠性和稳定性。
民航空管二次雷达系统还需要考虑与其他电磁设备的干扰问题。
在雷达系统的工作频率范围内,可能存在其他无线电设备的工作,如通信设备、导航设备等。
这些设备的工作信号可能会对雷达信号产生干扰,从而影响到雷达系统的工作效果。
在电磁环境分析中,需要对周边的电磁设备进行调查和评估,确保雷达系统与其他设备之间的工作协调性,避免干扰问题的发生。
民航空管二次雷达系统还需要考虑电磁环境中的无线电频谱管理问题。
根据相关规定,民航二次雷达系统的频谱使用需要遵守国家和国际的法律法规和标准。
在电磁环境分析中,需要对频谱使用情况进行监测和管理,确保民航二次雷达系统的频谱使用符合规定,并与其他无线电设备的频谱使用协调一致。

图1雷达头设系统配置图1AMS SIR-S雷达系统概述1.1系统介绍AMS SIR-S雷达系统采用单脉冲技术,使得测角精度大大提高,理论上分析一个雷达回波就可以确定目标的到达角,从而可以大大减少地面站的询问率,使得异步干扰进一步减少。
由于利用OBA信息和更为强大的计算能力,使得雷达录取时抗击假目标和同步干扰目标性能也大大提升,雷达的水平覆盖范围是0.5-256海里,垂直覆盖角度为0.25度—40度,检测概率不小于99%。
AMS SIR-S雷达系统包括天线Science&Technology Vision科技视界101Science &Technology Vision科技视界群,SIR-S 单脉冲二次监视雷达,双雷达头处理器(RHP),雷达维护监视席位,本地控制和监视系统,以及双以太局域网,其连接如图1所示。
1.2发射机单元发射机单元由两个发射机组成:一个为主发射机,也是和通道发射机;一个是辅发射机,也是控制通道发射机。
发射机采用全固态发射机,并且使用了插接式连接。
发射机输出功率衰减分为8个等级,从-12dB,以2dB 为步进,也可以完全关断输出功率。
输出功率可进行方位编程,每周扫描分为128个扇区,相应每个扇区为2.8度。
在每个扇区对P1-P3和P2的输出功率进行控制。
发射机具有BITE(built in test equipment)自检功能,可向RPCM 发送状态报告,并接受RPCM 控制,其检测可到达LRU (least replaceable unit)级别。
发射机的频率为1030MHz+0.01MHz;输出功率大于62dBm。
如图2为发射机单元原理方框图。
1.3接收机单元接收机采用全固态接收机,并且使用了插接式连接。
接收机单元包含三个匹配的对数通道,分别是Σ通道,Δ通道和Ω通道。
另外还包括了相位检测器。
三个通道各向RPCM 送出两路视频信号,向相位检测器送出一路视频信号。

DLD—100C型与DLD—100A型二次雷达的区别作者:郭井波文敏来源:《电子技术与软件工程》2016年第19期摘要2006年,长春龙嘉国际机场安装了我国民航系统使用的首套国产空管二次雷达。
该雷达是南京恩瑞特实业有限公司(中国电科十四所)研制生产DLD-100A型二次雷达,已连续运行10年。
随着长春龙嘉机场的航班成倍增多及空运能力的提高,对二次雷达的最大目标处理能力提出更高的要求,DLD-100A型二次雷达已经难以满足要求。
恩瑞特公司在2011年研制了新一代具有S模式的DLD-100C型二次雷达,并获得中国民航颁发的使用许可证。
针对两代雷达产品,本文着重介绍新一代二次雷达的产品相对上一代产品的优势及特点。
【关键词】DLD-100C型二次雷达功能提升维护便利 DLD-100A型二次雷达南京恩瑞特实业有限公司2011年研制了新一代具有S模式的DLD-100C型二次雷达,并获得中国民航颁发的使用许可证。
该雷达采用的大规模集成电路已经达到当代先进水平,且采用了当代最先进的处理架构,雷达系统的性能得到极大的提升,不仅目标处理能力、接收机灵敏度、在线状态监测等多项技术指标大大提高,而且由于二次雷达S模式的实现,提高了对密集目标的鉴别率和抗混淆能力,对日益增长的航空业务提供了强有力的技术保障。
由于设备集成度的提高,结构设计的改进,系统的可靠性也大大提升,同时设备的可操作性和可维修性得到很大改善。
1 系统指标提高新雷达采用的大规模逻辑器件和当代最先进的处理架构,大大提高了二次雷达系统的整体性能,目标处理能力由每天线转400批提高到每天线转900批,每扇区64批提高到每扇区80批。
新设备采用先进的数字中频接收机,应答信号的采样率由8MHz提高到20MHz,模数转换精度由8位ADC提高到24位ADC,通过数字中频实现了Σ、Δ接收通道幅相一致性的自动补偿,更好的保障了二次雷达单脉冲功能的实现。
2 实现S模式DLD-100C二次雷达实现S模式功能,从全呼方式变为点名呼叫方式,从根本上解决了多目标相互干扰和混淆的问题,大大提高的目标的发现概率,降低了虚警率,实现了二次雷达对空中应答目标的准确定位和跟踪,还实现了地-空-地之间的数据链功能。

自动化技术0 引言目前,全国范围内仍有一定数量不带NTPS(网络时钟协议服务器)的老旧雷达正在服役,这些雷达输出的目标报告中没有GPS时标。
自动化系统会根据接收到目标报告的时间和间隔判断雷达数据的有效性并参与融合计算。
如果雷达头传输至终端自动化系统间的数据链路出现长时间累计延时,虽然每次接收到的数据延时都在可接受范围内,但是延时在每次接收中均存在,长时间的积累就会将延时放大,超过可接受范围。
最终导致自动化系统多雷达融合出现错误,产生大面积目标分裂或者偏移,影响管制指挥。
因此,需要设计一种监控方案,可对无时标雷达数据的时延情况进行监控,及时上报告警或丢弃不可用的雷达数据。
1 雷达数据时延监控方案分析雷达数据出现劣化,如丢包、延时、抖动过大等产生的原因,可归纳为以下两个方面:(1)传输造成的时延,如在传输接口链路、转发过程、切换环节引起的传输质量问题或运营商链路由于常规维护、频繁割接和本身的故障造成的传输质量问题。
(2)雷达自身的原因,如雷达头本身在录取、编码处理时,造成的正北帧丢失,扇区不连续,数据包缓存过大等。
因此,针对无时标雷达数据时延的监控方案,可以从两个方面实现:一是为雷达数据打上时标,这又可分为对雷达原始数据加时标进行监控和新增一路带时标的雷达基准数据用作比对;二是在雷达数据进入自动化系统前,对其进行质量分析进而触发告警剔除异常数据。
2 监控方案的实现■2.1 方案一:监控加时标的雷达原始数据目前,绝大多数老旧雷达输出ASTERIX和ALENIA MP2格式雷达数据。
标准ASTERIX格式雷达数据具备时间数据项内容,仅需在雷达头将GPS时间按照标准ASTERIX格式要求加入雷达数据中即可。
ALENIA MP2格式雷达数据没有定义时间数据项内容,如果需要增加时间数据项需要转换为ASTERIX格式雷达数据送自动化系统处理;或者保持原数据内容不变在雷达头输出数据中额外增加时间数据项内容,传输至终端判断有效性后,再去除时间信息送自动化系统,如图1所示。

二次雷达接收系统设计及幅相处理作者:郑殷超来源:《现代电子技术》2011年第09期摘要:为了准确判定目标偏离天线轴的方向和消除旁瓣应答信息干扰,二次雷达接收系统采用了三路对数接收机单脉冲比幅体制,将带有目标信息的射频信号变换成对数视频送至应答处理,通过对和、差通道脉冲信号鉴相器处理,判定目标偏离天线轴的方向;运用对和、控制通道脉冲幅度比较的方法,产生接收旁瓣抑制信号以消除应答干扰。
从实验和产品交付后的使用情况来看,接收机设计合理,幅相处理效果满足雷达整机的要求。
关键词:二次雷达; 对数接收机; 鉴相器; 脉冲比幅中图分类号:TN958.96-34文献标识码:A文章编号:1004-373X(2011)09-0013-04Design and Phase Processing of Secondary Radar Receiver SystemZHENG Yin-chao(East China Research Institute of Electronic Engineering, Hefei 230031, China)Abstract: In order to accurately determine the deviation of the target from the boresight line and eliminate side-lobe response interference, the three-route logarithmic receiver and single pulse amplitude comparison system is applied on the secondary radar receiver system. The system can transfer radio-frequency signal with target information into logarithmic video and send to the responding unit, then the recognition and processing of the sum and difference channel impulse signals can determine the deviation of the target from the boresight line, and the sum & control channel pulse amplitude comparison method can generate side-lobe receiving inhibit signal and eliminate response interference. From the experiment and the usage after delivery, the receiver is well-designed, and its amplitude and phase processing can meet the need of the radar.Keywords: secondary radar; logarithmic receiver; phase detector; pulse amplitude comparison0 引言二次雷达也称为航空交通管制雷达信标系统,通过地面站和目标应答器之间的询问和应答,实现对目标的跟踪,接收到的回波中包含了目标的距离和方位信息、气压高度信息,还可以用于对军用和民用目标的识别。
对民航空管二次雷达系统安全运行的电磁环境分析民航空管二次雷达系统是民航空域管理和航空交通控制的重要组成部分,它通过接收飞机上的二次雷达回波信号来实现飞机的识别和跟踪。
为了保证二次雷达系统的安全运行,需要对其所处的电磁环境进行分析和评估,以确定可能存在的电磁干扰源和应对措施。
对于二次雷达系统而言,最常见的电磁干扰源是来自其他无线电频段的发射设备。
附近的无线电台、电视台和手机基站等都有可能在相邻频段上发射信号,这些信号可能会干扰到二次雷达的接收工作。
需要在设计和选址阶段,确保二次雷达系统远离这些干扰源,或者采取屏蔽和滤波等措施来抵消干扰信号。
二次雷达系统本身也会产生电磁干扰。
雷达发射机产生的高功率脉冲信号可能会对附近的其他电子设备产生干扰。
雷达天线辐射的电磁场也可能对周围的无线电设备产生干扰。
在二次雷达系统的设计和安装过程中,需要合理规划雷达发射机和天线的位置和功率,以减少对其他设备的干扰。
当二次雷达系统工作在接收模式时,可能会受到来自雷电和其他大气电磁干扰的影响。
雷电产生的强电磁场信号可能会对二次雷达系统的接收机产生干扰和损坏。
在设计和安装二次雷达系统时,需要考虑防雷措施,例如设置避雷针和采用合适的防雷设备,以保护系统的安全运行。
对于二次雷达系统而言,还需要考虑电源供应的稳定性和可靠性。
因为二次雷达系统通常需要连续运行,并且对供电的稳定性要求较高,所以需要确保电源供应的可靠性,并且设置备用电源以防止停电和电源故障等情况导致系统瘫痪。
在二次雷达系统的运行过程中,需要进行定期的维护和检查,以确保设备的正常运行和防范潜在的故障和干扰。
定期的天线调校和设备校准可以帮助减少电磁辐射和提高接收精度,从而保证二次雷达系统的准确性和可靠性。
对民航空管二次雷达系统的电磁环境进行分析是保障其安全运行和可靠性的重要环节。
通过合理设计和选址、规划雷达发射机和天线、采取防雷措施、确保电源供应的稳定性以及定期维护和检查等措施,可以最大程度地降低电磁干扰对二次雷达系统的影响,确保系统的正常运行。

机场安全监测雷达系统综述机场安全监测雷达系统是指用于监测机场周围航空器、鸟类、风切变等可能影响飞行安全的因素的雷达系统。
该系统可以实现对机场离场和进场的航空器进行实时监测,并可预警风切变、鸟类等对飞行安全的威胁,提高机场运行的安全性和效率。
机场安全监测雷达系统的主要功能包括:实时、连续监测机场周围的航空器、鸟类等;提供风切变、鸟撞等异常情况报警;快速、准确地定位航空器、鸟类等物体;提供数据接口,实现数据的共享和交换。
在机场的控制中心,监测雷达系统将与其他系统,如气象预测、应急救援、航空器轨迹监测等进行联动,提高机场的综合管理和应急能力。
机场安全监测雷达系统的核心技术是雷达信号处理技术。
雷达信号处理技术主要分为信号接收、信号处理、目标检测三个部分。
信号接收是指将雷达系统中的发射机发出的信号接收到回波信号并转换成电信号的过程;信号处理是指对回波信号进行滤波、放大、解调、采样等处理,以提高信噪比和抑制不需要的干扰信号;目标检测是指对处理后的信号进行分析和解译,从而确定目标物体的位置、距离、速度、方向等参数。
目前市场上的机场安全监测雷达系统主要分为三类:非扫描式二次雷达、扫描式二次雷达和三次雷达。
非扫描式二次雷达是指无需旋转天线的雷达系统,主要用于机场进近区域探测;扫描式二次雷达是指需要旋转天线进行扫描的雷达系统,可用于机场周边区域的全向探测;三次雷达则是指通过接收ADS-B信号,将其转换成雷达显示和控制信息的雷达系统。
机场安全监测雷达系统的选择需要根据机场的特殊情况进行定制。
在选择机场安全监测雷达系统时需要考虑机场的规模、航班量、气象条件、鸟类种类和数量等因素,以确定合适的雷达系统类型、雷达探测距离和角度、雷达数据处理速度和精度等系统参数。

doi :10.3969/j.issn.1001-893x.2016.02.014引用格式:邓欣.提高航管二次雷达近程目标跟踪稳定性的方法[J].电讯技术,2016,56(2):190-194.[DENG Xin.A method for improving sec⁃ondary surveillance radar system′s short-range targets tracking stability[J].Telecommunication Engineering,2016,56(2):190-194.]提高航管二次雷达近程目标跟踪稳定性的方法*邓 欣**(中国西南电子技术研究所,成都610036)摘 要:针对相控阵体制航管二次雷达系统在雷达近程探测空域内无法稳定监视目标的问题,提出了一种提高航管二次雷达系统对近程目标跟踪稳定性的方法㊂基于现有航管二次雷达系统的硬件架构,设计了在对监视空域进行航管扫描询问过程中密集插入对近程目标跟踪询问的工作方式,并给出了航管近程跟踪询问流程和波位随机同步跳转控制时序的详细设计方法以及对航管近程跟踪能力的估算方法㊂仿真计算结果验证了该方法的可行性和有效性㊂关键词:相控阵天线;航管二次雷达;近程探测;扫描询问;稳定监视;近程跟踪询问中图分类号:TN958.96 文献标志码:A 文章编号:1001-893X (2016)02-0190-05A Method for Improving Secondary Surveillance RadarSystem′s Short -range Targets Tracking StabilityDENG Xin(Southwest China Institute of Electronic Technology,Chengdu 610036,China)Abstract :For the problem that short-range targets are unable to be surveilled stably by secondary surveil⁃lance radar(SSR)system based on phased array antenna(PAA),a method is proposed to improve the SSR system's stability of tracking short-range targets.Based on the hardware architecture of the existing SSR system,a new operation mode is designed to insert short -range tracking interrogations intensively in the process of SSR scan interrogation.The flow of short-range tracking interrogation and the time sequence de⁃sign of beam position jumping synchronously are presented,and an estimation method of the capability to track short-range targets is also introduced.Simulation result validates the feasibility and effectiveness of the proposed method.Key words :phased array antenna;air traffic control secondary surveillance radar;short-range detection;scan interrogation;stable surveillance;short-range tracking interrogation1 引 言航管二次雷达(Secondary Surveillance Radar,SSR)系统[1-2]作为对空域目标的识别和监视系统,在空中交通管制㊁目标识别㊁信标跟踪等多方面得到了广泛应用,配置在如机场㊁航路㊁飞机和舰船等军事和民用领域的各类平台㊂航管二次雷达系统可完成对雷达覆盖空域的自主扫描探测,实现对协同飞机的定位㊁定高㊁身份识别及飞机航迹的显示,已成为空中交通管制的重要手段㊂相对于传统的基于机械扫描的航管二次雷达系统,为了适应重点空域警戒功能而发展起来新体制航管二次雷达系统,采用相控阵询问天线体制,可实现对扫描波束的快速㊁灵活控制[2],且基于安装平台的不同需求,需兼具有进近管制和航路监视的能㊃091㊃第56卷第2期2016年2月电讯技术Telecommunication EngineeringVol.56,No.2February,2016***收稿日期:2015-08-03;修回日期:2015-12-18 Received date :2015-08-03;Revised date :2015-12-18通信作者:xind829@ Corresponding author :xind829@力㊂为保证对整个雷达探测空域的实时监控和稳定监视,要求航管二次雷达系统能够实时获取连续㊁稳定的飞机航迹信息[3-4]㊂但采用现有的航管工作方式,在雷达近程探测范围内存在监视不稳定区域,尤其当飞机进行大机动飞行(速度快㊁转弯半径小)时,会出现飞机航迹断续不连贯的问题㊂存在近程航路监视不稳定问题的主要原因是:为保证航管目标航迹的准确度,对目标角度变化率设置了相应的门限τ,超出该门限值,则判定接收数据为无效数据而剔除;对远距离的目标进行扫描监视时,在扫描周期内目标运动相对雷达视角变化较小,两次测量目标的角度差在门限范围内,可进行航迹相关[5],但当飞机相对于航管二次雷达近距离飞行时,目标相对雷达角度变化大,测量角度数据极易超出门限值而被剔除㊂因此,出现目标航迹断续现象㊂针对以上问题,现有的国内外航管二次雷达系统大多采用进近管制二次雷达和航路监视二次雷达组合配置的方式[5],确保同时满足对近㊁远程目标精确㊁稳定监视的使用需求㊂本文基于采用相控阵询问天线的航管二次雷达系统,提出了一种提高对近程目标精确探测和稳定跟踪能力的方法㊂通过对航路监视二次雷达的工作时序优化设计,在航管扫描询问的工作方式下插入对近程目标的跟踪询问,无需增加二次雷达数量便可实现对雷达覆盖空域内飞机的全程稳定监视和提供准确的目标特征信息㊂2 航管二次雷达系统工作原理航管二次雷达系统主要由相控阵询问天线㊁旁瓣抑制天线和询问主机等组成,如图1所示㊂其中询问天线由天线辐射口面㊁T /R 组件㊁波束形成网络和波控器等组成,询问主机由询问信道㊁航管信号处理分机和航管主控分机等组成㊂图1 航管二次雷达系统组成框图Fig.1Block diagram of SSR system航管二次雷达采用和差单脉冲测角方法,只需进行一次询问即可精确测量飞机应答脉冲信号的到达方位,并将该方位数据用于建立飞机航迹㊂来自飞机的航管应答信号经过T /R 组件的移向和放大后,再通过波束形成中的功率合成器和和差器形成和信号和差信号,送入询问主机进行信号解析和测角㊁测距等工作㊂在航管扫描询问时,首先,由航管主控分机向询问天线的波控器发送天线指向信息,波控器将天线指向转换成包含所有T /R 组件移相信息的移相码,控制天线指向切换至航管询问方位;其次,由航管主控分机将询问参数送至航管信号处理分机,并触发航管信号处理分机产生航管询问信号和旁瓣抑制信号,在航管信号处理分机中完成对接收的飞机应答信号进行信号处理㊁测角㊁测距和形成目标点迹信息;最后,由航管主控分机进行点迹融合和建立目标航迹㊂航管主控分机对询问信道进行收发控制和工作状态控制㊂基于近程目标相对于雷达天线快速机动的特点,本文方法采用对近程目标的定位和跟踪算法,由航管主控分机统一管理航管工作流程和对各分机㊁模块的综合调度,航管主控分机根据对飞机各次测量数据的相关度,建立对近程目标跟踪询问的任务需求,在航管扫描流程中插入近程跟踪询问㊂3 本文方法3.1 近程目标跟踪询问流程在预先设定的相对雷达天线的近程区域内,对于已建立航迹的近程目标,选取其中距离航管二次雷达最近的P 批目标进行自动跟踪询问,或者通过人工干预的方式在人机交互界面手动选取跟踪目标㊂对近程目标的航管跟踪询问流程如图2所示,主要在航管主控分机中完成,具体说明如下:(1)对询问信道进行扫描询问功率㊁灵敏度时间控制(Sensitivity Time Control,STC)后,启动航管扫描询问,航管主控分机对已建立航迹的目标进行筛选,如存在近程目标则进入第2步;(2)判断在一个跟踪周期内已跟踪的近程目标数量是否超过预先设定的跟踪目标批数P ,如是则返回第1步,否则转至第3步;(3)判断在扫描询问中近程目标的航迹稳定性,即在扫描限制数范围内检测到的点迹数据与已建立的航迹数据是否具备相关条件(在幅度和位置㊃191㊃第56卷邓欣:提高航管二次雷达近程目标跟踪稳定性的方法第2期信息判决门限的范围内),如是则返回第1步,否则判定近程目标的航迹不稳定,建立近程跟踪询问的任务需求,转至第4步;(4)暂停航管扫描询问,缓存扫描参数,对询问信道进行近程跟踪询问功率㊁STC 控制;(5)定位 将询问天线的波束宽度作为大步进波束跃度,以最近一次探测到的目标位置为中心,进行连续三个方位的近程跟踪询问;(6)预推 根据以往的目标数据计算出目标的运动方向㊁速度等参数,并根据目标跟踪询问周期预测下一次跟踪询问的方位[6];(7)跟踪 在下一跟踪询问周期到来时,根据预测的目标方位,在航管扫描询问中插入对目标的近程跟踪询问,在一个跟踪周期内只需进行一个方位的跟踪询问便可获得准确的目标态势信息,建立稳定的航迹;在每个跟踪周期的近程跟踪询问完成后,恢复航管扫描设置,返回至第1步㊂图2 近程目标跟踪询问流程图Fig.2Flow chart of short-range tracking interrogation3.2 波位快速同步跳转控制时序设计在航管二次雷达系统中,航管扫描询问周期应不超过航管的数据更新时间㊂因此,在航管的工作时序方面,提出了波位快速同步跳转控制的时序设计方法,以实现航管扫描询问中密集插入近程跟踪询问且满足数据更新时间的要求㊂将航管监视空域均匀划分为以波位号代表波束指向㊁每一波位预留相同时间窗的N 个连续波位,为确保扫描波束对航管监视空域的全覆盖并提高测角精度,如图3所示,相邻波位间隔的经验取值为不超过询问天线波束宽度的1/2,表达式为ϕa N ≤θ3dB2㊂(1)式中:ϕa 为航管监视空域范围(方位面);θ3dB 为询问天线方位面的波束宽度㊂图3 扫描波位间隔示意图Fig.3Diagram of scan beam position space为保证近程跟踪询问能够随时暂停航管扫描询问,且不影响航管扫描询问的航迹质量,时序设计示意图如图4所示㊂图4 航管控制时序设计示意图Fig.4Diagram of SSR control time sequence design具体设计为:按照波位号对应的方位ϕ1,ϕ2,,ϕN 上依次完成航管扫描询问,以实现对整个雷达覆盖空域的扫描监视㊂航管主控分机根据航管扫描询问和航管近程跟踪询问的询问驻留时间计时产生同步脉冲信号;在对方位ϕ1进行扫描询问时,航管主控分机预先将扫描方位ϕ2的波位号和询问参数分别置入波控器和航管信号处理分机,在航管主㊃291㊃ 电讯技术 2016年控分机对方位ϕ1的扫描询问计时结束后,向波控器和航管信号处理分机同时发出方位ϕ2扫描询问的同步脉冲信号,同步脉冲信号触发波控器切换天线指向至ϕ2,并触发航管信号处理分机开始扫描方位ϕ2的询问处理工作㊂如在方位ϕ2的扫描询问期间,航管主控分机检测到在方位ϕm有近程目标且目标航迹不稳定,则重新向波控器和航管信号处理分机发送近程跟踪方位ϕm的波位号和询问参数,待方位ϕ2的扫描询问结束后,暂停航管扫描询问,发送同步脉冲,进行对方位ϕm的近程跟踪询问,并将计时调整为近程跟踪询问时间㊂在近程跟踪询问期间,航管主控分机预先将扫描方位ϕ3的波位号和询问参数分别置入波控器和航管信号处理分机,待近程跟踪询问结束后恢复航管扫描询问㊂波位快速同步跳转控制的时序设计实现了航管工作效率的最优化,且同时确保了航管近程跟踪询问不会影响航管扫描询问的目标航迹稳定性,具体分析如下:以相对雷达天线30km的近程目标为例,对近程目标进行一次跟踪询问(根据测角精度要求在一个方位连续询问至少8次)的时间在8ms之内,以目标方位为中心,最多进行连续3个波位近程跟踪询问后便立即返回航管扫描询问,且天线指向由扫描方位切换至近程跟踪方位的时间是微秒级的,因此航管近程跟踪询问对航管扫描询问的占据时间小于24ms,在近程跟踪询问期间,飞机位移相对航管二次雷达的角度变化远小于天线的波束宽度,不会影响航管扫描询问中对除近程跟踪目标外的飞机的航迹质量㊂3.3 航管近程跟踪能力估算航管扫描数据更新时间T sud可用以下关系式表示:T sud=T tk N tk+T scw N㊂(2)式中:T scw为扫描波位的驻留时间窗;T tk为暂停一次航管扫描询问的近程跟踪询问的占据时间;N tk为在航管扫描数据更新周期内近程跟踪询问次数㊂为保证航管测角的准确度,每个波位的询问次数应大于8次,则每个波位驻留时间窗应满足T scw≥8T ss+T pls㊂(3)式中:T ss为航管扫描询问中单次询问信号处理时间;T pls为同步脉冲的脉宽,为微秒量级,相对于毫秒量级的T scw可忽略,即T scw≥8T ss㊂(4)同理,为满足测角精度要求,近程跟踪询问在一个方位的询问次数应大于8次,且在一次暂停航管扫描询问的时间内,以目标方位为中心,最多进行连续3个波位的近程跟踪询问㊂因此,一次近程跟踪询问的占据时间T tk表示为T tk=24T ts㊂(5)式中:T ts为航管近程跟踪询问中单次询问信号处理时间㊂将式(4)和式(5)代入式(2)中,并结合式(1)中N的取值范围,可得以下关系式:2ϕaθ3dB≤T sud-24T ts N tk8T ss㊂(6)在一个航管扫描数据更新周期内,近程跟踪询问的占据次数N tk满足N tk=T sud×P㊂(7)式中:P为航管能够同时近程跟踪的目标批数,单位为批/s㊂将式(7)代入式(6)中可得P的取值范围,即P≤θ3dB T sud-16ϕa T ss24T ts T sudθ3dB㊂(8)根据航管二次雷达系统的询问频率不能超过航管最大询问率的要求[7],P还需满足以下关系式:8NT sud+24P≤f SSR㊂(9)式中:f SSR为航管最大询问率㊂将式(1)代入式(9),可得出P≤f SSRθ3dB T sud-16ϕa24θ3dB T sud㊂(10)因此,P需同时满足式(8)和式(10)的取值条件,由此可得出航管二次雷达系统能够跟踪近程目标的最大数量P max,这个数值也反映出航管二次雷达系统对近程目标的跟踪能力㊂实际应用中,在满足航管近程跟踪能力的同时,还需确保近程跟踪目标在各种机动飞行情况下的航迹质量㊂因此,航管二次雷达系统对近程目标的跟踪询问周期可由飞机的飞行轨迹和机动情况进行自适应调整㊂如当飞机进行大机动飞行时缩短近程跟踪询问周期,反之亦然㊂但在航管扫描数据更新时间内,总的近程跟踪询问波位数不能超过3P max T sud㊂4 仿真计算分析为验证本文方法的可行性,对上节给出的航管二次雷达系统能够实现稳定跟踪的最大近程目标数量进行仿真计算㊂以某航路监视二次雷达系统为例,该二次雷达系统采用一维相控阵询问天线,航管㊃391㊃第56卷邓欣:提高航管二次雷达近程目标跟踪稳定性的方法第2期扫描数据更新时间为T sud=10s,航管监视空域范围(方位面)ϕa=360°,航管扫描询问最大距离为400km,对30km内的目标进行航管近程跟踪询问,按ICAO附件10[7]的规定,航管最大询问频率f SSR= 450Hz,由此估算出T ss=3ms,T ts=1ms(考虑航管应答容量[7])㊂表1给出了不同天线波束宽度情况下,利用第3节的估算方法,对航管二次雷达系统可进行稳定跟踪的最大近程目标数量的仿真计算结果㊂由表1可知:相比现有航管二次雷达系统不具备对近程目标的跟踪能力且对近程目标监视能力较弱的情况,本文方法可有效实现对近程目标的跟踪和稳定监视,且几种天线波束宽度情况下的最大跟踪目标批数P max也满足实际近程监视空域的飞机数量和使用需求㊂由表1的数据进行对比分析得出:天线半功率波束宽度越大,航管二次雷达系统能够稳定跟踪的目标数量越多,但波束宽度增大的同时又会降低航管的测角精度㊂因此,在天线的设计上需同时兼顾航管二次雷达系统的近程目标跟踪能力和测角精度的要求㊂表1 航管二次雷达系统最大跟踪目标数量仿真计算结果Tab.1Results of the maximum quantity of SSRsystem tracking short-range targets序号θ3dB/(°)最大跟踪目标批数P max/(批㊃s-1)1815261435135摇结束语本文提出了一种适用于航管二次雷达系统的提高对近程目标跟踪稳定性的方法,通过在对监视空域航管扫描询问的过程中密集插入对近程目标跟踪询问的工作方式,可有效提高对近程目标监视的稳定性和准确性,解决了现有航管二次雷达系统由于扫描询问周期的限制无法对相对雷达天线的近距离大机动飞行目标进行稳定监视的问题㊂本文在不影响已有远程监视能力的前提下对航管二次雷达系统航管近程跟踪能力进行了详细的推导分析㊂几种天线波束宽度情况下可稳定跟踪的最大目标数量的仿真计算结果验证了本文方法的可行性和实用性㊂ 本文方法是在现有相控阵体制航路监视二次雷达系统的硬件架构基础上实现的,只涉及航管工作流程的改进设计㊂因此,可应用于航管监视二次雷达系统提升对近程目标跟踪能力的升级改造㊂本文方法仅适用于提高对已建立航迹的近程目标的跟踪能力,但对于二次雷达系统只获取到点迹信息㊁未建立航迹或无法建立航迹的目标如何进行跟踪和建立精确航迹的问题还需做进一步的研究㊂参考文献:[1] STEVENS M.Secondary surveillance radar[M].Boston:Artech House,1988.[2] 山秀明.航管二次雷达[M].北京:国防工业出版社,1983.SHAN Xiuming.Secondary surveillance radar[M].Beijing:National Defense Industry Press,1983.(in Chinese) [3] 张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2010.ZHANG Guangyi,ZHAO Yujie.Phased array radar tech⁃nology[M].Beijing:Publishing House of Electronics In⁃dustry,2010.(in Chinese)[4] 贾坤.航管二次雷达数据处理[J].电讯技术,2011,51(6):78-81.JIA Kun.Data processing of secondary surveillance radarfor air traffic control[J].Telecommunication Engineering,2011,51(6):78-81.(in Chinese)[5] 张尉.二次雷达原理[M].北京:国防工业出版社,2009.ZHANG Wei.Secondary surveillance radar theory[M].Bei⁃jing:National Defense Industry Press,2009.(in Chinese) [6] 吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.WU Shunjun,MEI Xiaochun.Radar signal processing anddata processing technology[M].Beijing:PublishingHouse of Electronics Industry,2008.(in Chinese) [7] ICAO Annex10VolumeⅣ,Surveillance and collision a⁃voidance systems[S].作者简介:邓 欣(1982 ),女,陕西汉中人,2007年于西安电子科技大学获硕士学位,现为工程师,主要研究方向为二次雷达和阵列信号处理㊂DENG Xin was born in Hanzhong,ShaanxiProvince,in1982.She received the M.S.degreefrom Xidian University in2007.She is now an engineer.Her research concerns secondary radar system and ar⁃ray signal processing.Email:xind829@㊃491㊃电讯技术 2016年。

浅谈二次雷达与单雷达数据源的航迹跟踪技术摘要:二次雷达系统不仅能够作为单雷达系统使用,还可以作为终端处理系统接引单雷达数据,保障空域内的航空安全。
本文对二次雷达与单雷达数据源的航迹跟踪技术进行就介绍,主要介绍了航迹关联防范、斜距-高度的校正方法、航迹跟踪方法、单雷达航迹补充跟踪、高度跟踪和实时质量控制6个功能过程。
关键词:二次雷达;单雷达数据源;航迹跟踪0 概述二次雷达系统能够实时监视空域内的飞行目标,捕获其搭载应答机的下行数据,计算距离方位信息,完成对飞行目标的监视,为其空域范围内的目标提供飞行安全保障。
在实际使用中,一次/二次雷达、ADS-B、MLAT等多种探测设备的探测数据会被统一利用并接引到综合管制系统供航空管制人员进行数据分析与空域使用规划。
当二次雷达系统(以下简称“系统”)作为终端接收单一次雷达数据时,需要结合二次雷达本身的数据源对一次雷达的探测数据进行航迹跟踪。
基本组成如下图所示。
图1单雷达数据源的航迹跟踪组成1 航迹关联方法当系统接收到新的雷达航迹时,需要进行空间一致性转换。
首先将雷达航迹的位置信息换算为大地坐标系的经度、纬度信息,再使用球面方位投影计算,获取以本系统为原点的笛卡尔坐标信息。
系统航迹和雷达航迹完成了空间统一性转换。
此时可以使用直角坐标系的距离门限判断,当其判断结果在判别波门之内的,则视为关联成功,需要完成各自航迹号的关联与记录。
2 斜距-高度校正雷达站附近仅有少数高空目标才斜距-高度校正需要。
距离雷达站较远及飞行高度低的目标斜距、地距相差很小。
因此,在实用系统中可以使用下述简化近似算法:先把雷达航迹的笛卡尔坐标变换成极坐标,得到目标的斜距r h。
再用简单的正射投影关系:近似计算目标地距r,式中C为目标C模式高度。
此式仅在目标距雷达站距离较近时比较精确,这正是我们所需要的。
得到真正的地距r之后,便可直接按比例r/ r h折算出真正的笛卡尔坐标,使用球面方位反投影方法,获得其对应的经纬度信息,再使用反投影法,得到转换后的笛卡尔坐标,经内插外推后,参加加权平均的数据融合计算。
对民航空管二次雷达系统安全运行的电磁环境分析民航空管二次雷达系统是一种用于航空领域的飞行监视设备,能够实时监测飞机在空中的位置和状态信息。
考虑到其敏感性和重要性,对其安全运行的电磁环境进行分析和评估是至关重要的。
本文将对民航空管二次雷达系统安全运行的电磁环境进行详细分析。
我们需要考虑的是民航空管二次雷达系统的工作频率和功率。
二次雷达系统的工作频率通常在1030MHz至1090MHz之间,工作功率在数十瓦到上百瓦之间。
这样的频率范围和功率水平决定了系统对电磁干扰的敏感性。
我们需要考虑的是系统周围的电磁环境。
民航空管二次雷达系统通常安装在空管塔或者空管中心附近,周围环境可能存在多种电磁干扰源,如雷达系统、无线电设备、通信设备等。
这些干扰源可能会对二次雷达系统的性能产生负面影响,需要进行仔细分析。
为了分析系统的电磁环境,我们可以参考以下步骤:1. 收集数据:我们需要收集相关的电磁环境数据,包括频谱监测数据、电磁辐射数据等。
这些数据可以通过电磁监测仪器、频谱分析仪等设备获取。
2. 数据分析:在收集到数据之后,我们需要对其进行分析。
可以通过频谱分析来检测是否存在工作频率附近的干扰源。
可以通过电磁辐射数据分析来评估干扰源对系统的潜在影响。
3. 干扰源识别:在进行数据分析的基础上,我们可以识别出潜在的干扰源。
如果频谱分析显示在工作频率附近存在强烈的信号源,那么这个信号源很可能是干扰源之一。
4. 干扰评估:一旦识别出干扰源,我们就可以对其进行评估。
评估的重点包括干扰源的功率、频率稳定性、占用带宽等参数。
通过评估,可以确定干扰源对系统的影响程度。
5. 措施建议:我们可以根据干扰评估的结果提出措施建议,以保证民航空管二次雷达系统的安全运行。
这些建议可以包括干扰源屏蔽、频率规划、协调通信等方面。
对民航空管二次雷达系统安全运行的电磁环境进行分析是非常重要的。
只有对系统周围的电磁环境进行充分的了解和评估,才能保证系统的正常运行和航空安全。
第8期2023年4月无线互联科技WirelessInternetTechnologyNo 8April,2023作者简介:廖毅轩(1991 ),男,广东梅县人,工程师,硕士;研究方向:智慧空管㊂基于二次雷达的机场雷达探测终端的设计与应用廖毅轩(民航中南空管设备工程(广州)有限公司,广东广州510410)摘要:随着航空技术的发展,机场雷达终端系统得到了广泛的应用㊂其设计过程以二次雷达原理为基础,引导和控制飞机㊂文章对二次雷达探测终端的工作原理和系统组成进行说明,从系统设备组成以及系统设计要求两个方面对二次雷达系统的设计方式进行概述㊂文章通过实验的方式对提出的机场雷达探测终端进行检验,结果发现设计的机场雷达探测终端在探测范围和探测距离精度两个方面均符合探测标准,以期通过对机场雷达探测终端的研究提升机场运转的稳定性㊂关键词:二次雷达;航空技术;终端系统中图分类号:TN958 96㊀㊀文献标志码:A0㊀引言㊀㊀随着我国航空事业的发展,通用机场的数量持续增加㊂相关数据显示,截至2022年6月,通用机场数量达384个,受飞机起飞架次数量扩大的影响,飞行管理难度明显提升[1]㊂在飞行过程中,交织码元幅度信息的变化不是规则的,这使得在飞机的应答信号交织时,传统的二次雷达识别和提取精确度有所降低,如提取错误的代码㊁高度测角精度不够等方面㊂加强飞行管理是航空事业发展的重要一环,这就要求机场的终端系统具有较强的处理能力和抗干扰能力[2]㊂余苗[3]针对二次雷达设计出一种补偿系统,通过实验验证后发现该系统具有降低时间及人力成本和提高精准程度等优点㊂本文提出了机场雷达终端的设备组成及设计要求,以期能够为我国未来机场雷达系统的开发提供参考,为终端系统的实际应用提供借鉴㊂1㊀二次雷达探测终端原理1 1㊀工作原理㊀㊀二次雷达在开机状态下,可以初始化信号处理机和信号交换机等设备,其工作方式为电源模块发送电压到其他模块中㊂在初始化过程中,由于接收命令和控制数据的不同,系统对命令和控制的响应方式也不同㊂主程序不受这一规则限制,不会受到任何命令或数据的影响[4]㊂二次雷达通常由操作员通过雷达监视或本地监视的方式,将获取的查询模式与方向等数据传输到信号处理机,就可以达到定位目标位置的目的㊂其内部的工作模式略显复杂,将信息通过数据融合单元进行处理,并把查询处理后的信息传输给其他单元㊂能够接收这种信息的单元有两个,分别为编码单元和解码单元㊂其会根据请求方式的不同,用修改或混合的方式来处理发射机的频率码与编码符号等,通过开关发送无线电信号㊂二次雷达依靠主雷达显示的点航迹数据来判断目标位置,点航迹数据的获取则通过3条信道和接收机获得㊂信道主要为Ω天线通道㊁ð天线信道以及Δ天线信道㊂接收机的主要作用就是将产生的基带IQ信号发送至信号处理机,此设备处理方式包括幅度压缩㊁点迹凝集等㊂1 2㊀目标检测原理㊀㊀二次雷达作为雷达终端设计的重要部分,系统进行目标检测期间与飞机的反射面积不存在相关性,即一次雷达与二次雷达在对目标进行检测中的方式存在差异㊂与一次雷达相比,二次雷达在信息传输过程中产生的数据量更低㊂系统在进行目标检测的过程中,不是检测飞机的反射能量,而是由其接收飞机发射信号后产生的信号回波㊂因此,雷达终端系统的检测与飞机的反射面积无关,回波强度不会发生改变㊂除此以外,雷达终端系统在接收和发送信号期间的频率存在差异㊂当地面或气象目标发射信号时,由于其信号接收为1030MHz接收机,无法对1090MHz接收机接收系统终端信号造成干扰㊂其信号类型不仅包括目标的距离,还涵盖了目标的代码㊁高度等信息内容㊂本研究通过对雷达终端系统目标检测原理的说明,阐述了系统组成及系统设计的要求,以此为基础,为后续进行雷达终端系统实验奠定基础㊂1 3㊀系统组成㊀㊀雷达终端系统由3种系统组成,如图1所示㊂其中,主机分系统包括两个部分:处理和转化分机㊂天馈分系统又被称为二次雷达天线,其组成部分可以分为3种,第一种为左半部分,由相应的辐射单元构成,其中包含35个前向辐射振子和1个反向辐射振子,所有辐射振子构成方式相同,由11个耦集子构成㊂此系统第二部分和第三部分同样由辐射单元构成[5]㊂图1㊀雷达终端系统组成主机分系统根据各分机负责的内容不同,将内部分机分为两种㊂第一种为处理分机,它主要负责各个模块的构成,例如信号处理模块的构成㊁电源模块的构成等㊂第二种为转换分机,它主要作用为可筛选多㊀㊀㊀种射频信号,选择信号传输和接收的最佳路径[6]㊂监控分系统通过网线与主机系统连接㊂该系统主要由两部分组成,分别为维护软件和计算机㊂其中,维护软件主要依靠计算机来运行,在传输监控数据方面有着重要的作用㊂2㊀二次雷达系统设计2 1㊀系统设备组成㊀㊀雷达终端系统由3个部分组成㊂第一种为天馈系统,主要负责通过天线传输电磁波来实现辐射询问信号和接收应答信号的功能㊂第二种为主机系统,是雷达系统中最重要的组成部分,整个系统中主要的工作都由其内部的处理分机和转换分机完成㊂第三种为监控系统,主要负责控制二次雷达接收机的工作以及通过监控维终端完成对接收机的监控工作㊂二次雷达系统设计的设备组成功能及数量如表1所示㊂表1㊀二次雷达系统组成名称功能个数/个天馈系统通过电磁波获取信号-主机系统处理分机主要实现SSR询问的编码㊁调制㊁数据上报等功能1询问电源实时监测电源输出频率2发射机在不同模式的询问信号的调制㊁放大3接收机接收应答信号,传输基带IQ信号4信号处理模块自检㊁信道管理㊁编译码㊁航迹处理等功能2监控系统实时监控雷达运作状态-㊀㊀以处理分机为例,其由询问电源㊁发射机㊁信号处理等模块构成,处理分机的组成如图2所示㊂图2㊀处理分机组成2 2㊀系统设计要求㊀㊀机场雷达的终端系统对性能的要求很高,具体数据的精准程度指标如表2所示㊂环境条件要求如下:(1)温度要求㊂室内温度最低温度要求为0ħ㊁最高温度要求为45ħ,室外温度最低温度要求为-50ħ㊁最高温度要求为70ħ;(2)湿度要求㊂在室内工作时,如果温度为30ħ,工作环境的最低湿度为30%,最高湿度应ɤ98%;(3)供电要求㊂雷达系统主机工作电流为220V,最佳工作电压为50Hz,电压为交变电压,主机系统的耗电量不大于3kVA,系统功耗要求低于10kVA㊂表2㊀设备组成设计指标数值设计指标数值范围及距离<45m方位ɤ0 1ʎ视频分辨率<80%分辨率脉冲体制单个脉冲体制高度覆盖>18000m仰角范围0ʎ 40ʎ接收信号频率1090MHz天线转速正常工作状态下为6转/min最大目标处理率400批/帧检测概率>99%数据速率最低4s/帧,最高12s/帧系统端口UDP网络本次测试的雷达系统通过对工作设备进行了冗余设计,使得到的测试结果具有时效性强㊁准确度高等优点㊂冗余设计根据设计方法的不同,分为双重热备份和模块冗余备份两个部分㊂虽然双重热备份相比模块冗余备份,系统有更高的稳定性和独立性,但是基于可靠性和成本㊁功耗等方面考虑,本研究选择了更适合项目测试㊂3㊀应用效果分析㊀㊀为证明本次设计的系统性能指标可以满足雷达终端系统的设计要求,可以作为该系统的数据基础㊂在进行实验前,本研究仔细检测了主机分系统等所有参加测试的系统是否能够正常工作并将雷达系统整体调试到最佳状态㊂准备工作完成后,本次实验将在某实验地点进行㊂3 1㊀实验方法3 1 1㊀雷达终端系统探测范围检验方法㊀㊀测试雷达终端系统的范围应用以下方法:(1)在雷达终端系统保持开机状态下,连续24h对目标进行探测;(2)通过雷达探测得到的结果,记录被探测目标可以达到的最远距离,记录方法可以为人工记录或分析终端分系统所提供的数据等㊂合格判据:从实验结果中挑取探测高度超过10km的数据,若雷达的探测距离超过380km,则符合探测范围测试设计要求㊂3 1 2㊀雷达终端系统探测精度检验方法㊀㊀测试雷达终端系统的探测精度应用以下方法:(1)在雷达终端系统保持开机的状态下,连续24h探测空中民航飞机;(2)在终端系统工作时同时记录分系统的工作数据;(3)利用ADS-B地面站自动获取其监测范围内飞机的位置信息;(4)将测量的数据结果和系统测量结果进行对比,分析后计算距离精确度和方位精确度的平均方根值,以此来判断系统的精确度㊂合格判据:系统测试以距离和方位两个指标为判断依据,方位精度和距离精度设计要求分别为<0 1ʎ和<45m㊂3 2㊀结果统计㊀㊀此基于二次雷达的机场雷达探测终端实验,通过对探测范围以及探测距离精度进行检验,实验数据结果如表3所示㊂表3㊀实验数据统计结果序号实验项目数值数据备注1探测范围检验ȡ380km459 2km合格2探测距离精度检验<45m19 8m合格通过表3中的数据统计结果可见,提出的系统探测范围和探测距离精度检验的数据分别为459 2km㊁19 8m,证实本次实现设计的指标符合雷达终端系统的设计标准㊂4 结语㊀㊀本文通过对雷达终端系统的研究,获取关键性的技术手段㊂本文通过雷达探测终端系统对飞机监测数据与ADS-B地面站数据进行对比分析的结果,提出的机场雷达终端系统在探测范围和探测距离精度方面均满足设计要求,在航空飞行管理的整体改进和机场雷达终端系统的实际应用方面有着重要的理论价值㊂参考文献[1]李红兵.二次雷达显控终端的设计与实现[J].舰船电子对抗,2019(1):112-116.[2]刘嵩义.二次雷达系统干扰等问题的解决方法[J].电子测试,2019(23):124-126.[3]余苗.高精度窄波束二次雷达指向精度补偿[J].现代导航,2020(2):136-139,145.[4]陈伟,巫文俊,邹亮.ADS-BIN在二次雷达系统中的应用[J].电子技术与软件工程,2022(11):160-163.[5]水泉,黄涛.基于通用服务器平台的S模式二次雷达系统研制[J].电子技术与软件工程,2020(7):91-95.[6]杨思.二次雷达仿真和实测数据质量评估[D].天津:中国民航大学,2020.(编辑㊀王永超)DesignandapplicationofairportradardetectionterminalbasedonsecondaryradarLiaoYixuanCivilAviationGuangzhouATMSystemsEngineeringCo. Ltd. Guangzhou510410 ChinaAbstract Withthedevelopmentofaviationtechnology theairportradarterminalsystemhasbeenwidelyused.Itsdesignprocessisbasedontheprincipleofsecondaryradartorealizethepurposeofaircraftguidanceandcontrol.Theworkingprincipleandsystemcompositionofthesecondaryradardetectionterminalareexplained andthedesignmodeofthesecondaryradarsystemissummarizedfromtwoaspectsofthesystemequipmentcompositionandthesystemdesignrequirements.Theproposedairportradardetectionterminalistestedbyexperiment andtheresultsarefoundthatthedesignedairportradardetectionterminalmeetsthedetectionrangeanddetectiondistanceaccuracy inordertoimprovethestabilityoftheairportoperationthroughtheresearchoftheairportradardetectionterminal.Keywords secondaryradar aeronauticaltechnology terminalsystem。
二次雷达也叫做空管雷达信标系统(ATCRBS:Air Traffic Control Radar Beaco n System)。
它最初是在空战中为了使雷达分辨出敌我双方的飞机而发展的敌我识别系统,当把这个系统的基本原理和部件经过发展后用于民航的空中交通管制后,就成了二次雷达系统。
管制员从二次雷达上很容易知道飞机的编号、高度、方向等参数,使雷达由监视的工具变为空中管制的手段,二次雷达的出现是空中交通管制的最重大的技术进展,二次雷达要和一次雷达一起工作,它的主天线安装在一次雷达的上方,和一次雷达同步旋转。
二次雷达发射的脉冲是成对的,它的发射频率是1030MHz,接收频率是1 090MHz,发射脉冲由P1、P2、P3脉冲组成,P1、P2脉冲间隔恒为2微秒,P1、P3脉冲间隔决定了二次雷达的模式。
目前民航使用的是两种模式,一种间隔为8微秒,称为A模式又称为3/A模式(识别码);另一种间隔21微秒,称为C模式(高度码)。
接收脉冲由16个脉冲位组成,包含目标的高度,代码等内容。
二次雷达系统的另一重要组成部分是飞机上装的应答机,应答机是一个在接受到相应的信号后能发出不同形式编码信号的无线电收发机,应答机在接收到地面二次雷达发出的询问信号后,进行相应回答。
这些信号被地面的二次雷达天线接收,经过译码,就在一次雷达屏幕出现的显示这架飞机的亮点旁边显示出飞机的识别号码和高度,管制员就会很容易地了解飞机的位置和代号。
为了使管制员在询问飞机的初期就能很快地把屏幕上的光点和所对应的飞机联系起来,机上应答机还具有识别功能,驾驶员在管制员要求时可以按下“识别”键,这时应答机发出一个特别位置识别脉冲(SPI),这个脉冲使地面站屏幕上的亮点变宽,以区别于屏幕上的其他亮点。
20世纪70年代初计算机技术和雷达结合实现了航管雷达的全自动化。
这种系统把一次雷达和二次雷达的数据都输入数据处理系统,高速运转的计算机接收三个方面来的数据,第一是一次雷达的雷达信息,第二是二次雷达来的信标信息,并把它转换成数字码,第三是由航管中心输入的飞行进程数据,即飞行计划的各种数据。
第10卷 第3期 信息与电子工程Vo1.10,No.3 2012年6月 INFORMATION AND ELECTRONIC ENGINEERING Jun.,2012文章编号:1672-2892(2012)03-0266-04二次雷达波束控制系统设计夏勇,张浩,李晓娟,尤路(中国电子科技集团第38研究所,安徽合肥 230031)摘 要:传统的二次雷达通常采用机械扫描的工作方式。
基于无源相控阵天线体制的二次雷达作为一种新体制的雷达,是为了适应重点空域警戒功能而发展起来的。
波束控制系统是该二次雷达的重要组成部分,其基本功能包括:相位控制、同步控制、数据传输以及信号自检。
二次雷达波束控制系统采用了基于嵌入式计算机和网络的集中式波控方案设计。
在波控处理流程中,作者采取了软件和硬件的双重同步手段。
在波控数据的布相方法上,采用二级缓存同步布相的方法。
在实践过程中证明,基于嵌入式计算机和网络的二次雷达波束控制系统具有工作方式灵活多样、波束调度方便、可靠性高等优点。
关键词:二次雷达;波束控制;嵌入式计算机;网络;同步中图分类号:TN958.96文献标识码:ADesign of beam steering system for secondary surveillance radarXIA Yong,ZHANG Hao,LI Xiao-juan,YOU Lu(The 38th Research Institute,China Electronics Technology Group Corporation,Hefei Anhui 230031,China)Abstract:Mechanical scanning mode is often used in traditional secondary surveillance radar. As a new kind of radar concept, passive phased array based secondary surveillance radar is developed to suitthe function of vital airspace surveillance. The basic function of the beam steering system, which is animportant component of secondary surveillance radar, includes phase steering, synchronous processing,data transmission and signal self-checking. In this paper, the centralized design scheme based onembedded computer and network for beam steering system of secondary surveillance radar is adopted.Dual synchronous process method of software and hardware is employed in the flow of beam steering. Thesecondary cache is adopted for synchronous beam distribution. Proved in the course of practice, embeddedcomputer and network-based secondary radar beam steering system features a flexible way of working,beam scheduling convenience, and higher reliability.Key words:secondary surveillance radar;beam steering;embedded computer;network;synchronization二次雷达(Secondary Surveillance Radar,SSR)在航空交通管制、敌我识别等方面得到了广泛的应用,是大型雷达系统的重要组成部分。
石家庄国际机场二次雷达天线电机监控系统设计及功能实现
前言
二次雷达的天线驱动系统是由交流驱动电机提供旋转动力的,电机经过变速齿轮箱减速为雷达天线提供低速运转,同时另一个交流油泵电机为变速齿轮箱提供足量润滑油保障变速齿轮箱的齿轮稳定运行。
当天线驱动电机和油泵电机其中任何一个出现故障时,都将直接影响二次雷达系统的稳定运行,严重时甚至将直接导致台站关闭。
天线驱动电机和油泵电机的运行状态可以通过电机启动时的声音和电机表面温度来判断,即电机故障时可能会出现声音异常、表面温度升高等现象。
另外当环境温度过高或过低、润滑油不足等情况出现时也会影响电机正常工作。
二次雷达天线电机监控系统在不影响雷达正常工作的情况下,实现对环境温度、电机温度、变速齿轮箱油位、电机或变速齿轮箱运转声音的检测、记录,当环境温度、电机温度超过工作温度时发出报警通知值班员。
一、监控系统设计方案
1.系统主要功能:
交流驱动电机、交流油泵电机、环境温度检测;在不损伤电机基础上,利用表面温度传感器直接感应电机表面温度,并转换为电压的模拟量传送到控制主机。
表面温度传感器是由温度电阻和变送器构成,当温度变化时温度电阻的阻值将发生线性变化,温度电阻的阻值变化转换为0—20mV的电压送入监控报警主机。
变速齿轮箱、交流驱动电机、交流油泵电机声音检测;在电机房安装高保真拾音器,当设备运转异常时,拾音器拾取的声音通过光端机、光缆送入音响,使值班人员可以及时听到设备的运转声音。
实时图像监视;在电机房安装一台高清摄像机,拾取设备运转状态、变速齿轮箱油位,设备漏油情况及整个电机房图象情况。
2.系统原理及框图:
温度温度传感器采集到的温度变化信号送到报警主机后通过光钎收发器、光缆传到值班室的控制电脑上记录和显示温度变化情况,摄像机采集的图象及拾音器采集的声音信号经光端机、光缆传送到值班室的硬盘录像机上记录和显示图象及声音。
系统原理图如下:
图1 二次雷达电机监控系统原理图
图2 塔台及值班机房部分示意图
二、主要设备的功能及参数
1.瑞智先科C2881报警主机
模拟量输入可方便的设置电压或电流型探头,兼容各种模拟信号设备接入; R322/485通讯方式可选;
开关量报警输出;
可方便的查询和导出监控的数据记录;
2.查询工作站(联想R4900V)
CPU:E6600
内存:2G
硬盘驱动器:160G
3.索尼SSC—CB575R摄像机
650线高清图像
1/3英寸960H EXVIEW HAD CCD
焦距2.5mm
日夜功能转换
数字降噪
4.温度传感器
测量范围:温度-20℃~70℃,湿度0~100%rh
测量精度:温度±0.5在25℃时,湿度±3%rh在25℃时
5.快鱼拾音器
监听面积:10~50平方米
频率响应:20HZ~20KHZ
灵敏度:-35db
信噪比:75db
指向特性:全向性
处理电路:数字降噪,AGC声音
6.多功能光端机
传输1路视频信号、1路音频信号、1路电话信号
三、设备安装
为提高系统的防雷和抗干扰能力,信号采用光缆传输,光缆沿塔台电机房到值班机房原有桥架,敷设到值班机房的工作台地板下面,设并用尼龙扎带捆扎。
电机温度传感器分别安装于交流驱动电机、交流油泵电机外壳的工艺孔,环境温、湿度传感器安装与空调同一面墙上,减少空调的影响。
摄像机安装在于变速齿轮箱油位相对应的墙壁上,便于采集油位图像。
拾音器固定在距电机最近的墙壁上。
报警主机固定在塔台电机房墙壁上,光钎收发器、光端机安装在壁挂的控制箱内。
查询工作站、硬盘录像机安装在值班室的工作台上。
摄像机图像显示与查询工作站通过KVM切换,共用一台显示器。
安装示意图如图2所示。
四、系统接线规范
1.RS232端口连接
RS232接口用于连接电脑,和电脑通讯的接口。
RS232接口接线定义如图3所示。
2.开关量输入接口
开关量接口输入,可接烟感、红外、门磁、浸水检测、市电检测等开关量设备。
开关量输入接口接线定义如图4所示。
提示:开关信号(烟感、漏水检测、市电等)接入:DI1、Com1为一组;DI2、Com2为一组;不区分正负。
干接点信号、电平信号接入:DI1、Com1为一组;DI2、Com2为一组;DI接正,Com接负。
3.模拟量接口
模拟量接口输入,可接入温湿度探头,电压、电流互感器等设备,并可通过拨码开关设置其类型(电压/电流型)。
模拟量输入接口接线定义如图5所示。
拨码开关设置:
拨码开关拨至A时,设置对应的设备为电流型;拨码开关拨至V时,设置对应的设备为电压型。
4.输出端口
输出端口用于接开关量设备(如风机等),报警输出及485温湿度探头。
输出接口定义如下(图从左至右):
序号端口标识功能说明描述
1-2 DO1 开关量1输出接开关量设备(如风机等),可实现远程控制
3-4 DO2 开关量2输出
5-6 DO3 开关量3输出
7-8 DO4 开关量4输出
9 ALARM(+、-)报警信号输出+(12V)接声光报警器
10 报警信号输出-(GND)
11 RS485(A、B)485通讯A 接485温湿度探头、电量变送器
12 485通讯B
13 12V 12V电源输出接485温湿度探头电源
14 GND 12V电源地
五、结束语
石家庄机场二次雷达是石家庄地区唯一的一部二次雷达,肩负着石家庄机场和京广航路的监视任务,伴随着京广航路的日益繁忙和石家庄机场航班量的快速增长,对石家庄机场二次雷达设备安全保障的要求也越来越高。
天线驱动系统作为二次雷达系统的重要组成部分,它的稳定运行直接影响到雷达系统的可靠性。
在以往的设备保障中,二次雷达值班员对雷达塔设备间需要定期巡视,但是做不到24小时不间断的监控,本套系统经过研究论证阶段,安装阶段,目前系统已经安装完毕并进入到试运行阶段。
经过2个星期的试运行,本套系统工作稳定,并良好的实现了设计目的。