二次监视雷达原理
- 格式:ppt
- 大小:7.31 MB
- 文档页数:90
通信导航监视/CNS S 模式二次雷达的简单介绍Brief introduction to Mode S secondary radar华北空管局高树萍编译2007 年具有S 模式的苏庄一/二次雷达站和百花山单脉冲二次雷达站在民航华北空管局落成,标志着S 模式二次雷达在我国首家使用。
作为S 模式二次雷达站的建设者之一,尤其对S 模式感兴趣。
S 模式二次雷达系统精度高、抗干扰能力强、信息量大,它能实现两个以上雷达站之间的通信,其有为飞机对询问轮流做出应答。
二、S模式的特点S 模式地址唯一。
在S 模式二次雷达中,基于飞机地址唯一可选择性,S 模式询问含有56 位及112位信息串,其中包括24 位的飞机代码位;除了24 位地址位还有32和88 位信息位,任何装有S 模式的飞机都能由波束内的其它飞机分时,信号范围内的所有飞机应答没有重叠,应答录取则不会发生错误。
一机一码,减少或消除了同步干扰,同时防止询问信号串扰其它飞机,提高了检测能力。
(3)S 模式询问消除了来自天线波束范围内其它目标的应答信号,因此大大降低了干扰、应答机占据以及由于反射引起的虚假应ATC 提供数据链以及为VHF 语音通信提供备份的能力,可以应用在ADS-B 和TCAS 防撞等系统中,是二次雷达的发展方向。
一、S模式的定义S 模式即选址模式。
S=Select 选择,是有选择性地询问识别目标。
地面管制雷达站通过轮呼别询问。
因为对每一架装有S 模式的飞机,都分配给一个全世界独一无二的地址,该地址称为技术地址。
全世界有16 777 216 个技术地址可用,并且已由国际民航组织(ICA O)进行标准化。
每次S 模式询问都包含目标飞机的地址,被寻呼的飞机是回答询问的唯一飞机。
答。
(4)S 模式询问较高的飞机数据完整性,得益于S 模式唯一的地址和较安全的数据传输。
当传输期间编码被破坏时,S 模式有更好的编码维修能力。
(5)S 模式询问选择性询问减少了询问次数从而减少了干扰,最(ROLL-CLL)有选择地询问,在地面询问和机载应答装置之间具备双向交换数据功能,这就是说S 模式二次雷达站有能力选择性地寻呼其覆盖范围内的飞机。
第一章SSR原理1.1航路二次雷达SSR原理基本概念:雷达的原意为无线电检测和测距,他起到对目标定位的作用。
以脉冲雷达为例,通过天线发射射频脉冲。
当射频信号遇到目标以后,其中的一部分能量向雷达站方向反射,通过天线进入接收机。
经过雷达的接收系统放大、检测等处理后,可以发现目标的存在,并可以提取其他的参数信息。
测距是基于光速不变的原理。
由于回波信号往返雷达和目标之间,他将滞后于所发射的探测脉冲时间为Tr。
以探测脉冲作为时间基准,目标和雷达站之间的斜距R为:R = C * Tr / 2由上式可见,对目标的测距(系指斜距)和测时是一致的。
测角,对于监视雷达而言系指方位角 ,亦即偏离正北方向的角度。
一般由扫描天线的主波束的指向所确定,在航管雷达系统中常把工作于上述状态下的雷达称之为一次监视雷达(PSR)。
目前一次雷达主要有三大类:A.航路的监视一次雷达,作用距离在300-500公里B.机场的监视一次雷达,作用距离在100-150公里C.着陆雷达(在跑道附近)。
其信号是提供给塔台调度员的,在塔台显示器上观看飞机下滑的全过程,提供信号仰角7度(上下10度)PSR的优缺点:优点:只要有目标存在就可以发现它(不管敌我)缺点:⑴辐射功率很大(要足够大)R与P的关系:R↔功率的四次方根造价要高得多,设备庞大。
⑵易受干扰(障碍物,气象)⑶不能对目标识别当两个目标很近时也无法区别。
⑷要得到目标的高度也很困难。
二次雷达设备——第1页二次监视雷达(SSR)和一次监视雷达的区别在于工作方式不同。
一次监视雷达可以靠目标对雷达发射的电磁波(射频脉冲)反射,主动发现目标并确定其位置,而二次监视雷达不能靠接收目标反射的自身发射的探测脉冲工作。
他是同地面站(通常称询问机)通过天线的方向性波束发射频率为1030兆赫的一组询问编码(射频脉冲)。
当天线的波束指向装有应答机的飞机的方向时,应答机检测这组询问编码信号,判断编码信号的内容,然后由应答机用1090兆赫的频率发射一组约定的回答编码(射频)脉冲。
《二次监视雷达信号的处理和分析》篇一一、引言二次监视雷达(Secondary Surveillance Radar,简称SSR)是一种用于航空交通管制的重要设备,通过向飞机发送询问信号并接收其应答信号,实现对飞机的探测、识别和追踪。
在航空交通管理系统中,SSR信号的处理和分析对于保障飞行安全和提高交通效率具有重要意义。
本文将介绍二次监视雷达信号的处理和分析方法,包括信号的接收、处理、分析和应用等方面。
二、二次监视雷达信号的接收二次监视雷达信号的接收是整个处理和分析过程的第一步。
在接收过程中,SSR需要不断地向空中发射询问信号,同时接收来自飞机的应答信号。
这些信号经过空气传播,受到各种干扰和噪声的影响,因此需要进行信号的预处理和滤波。
在接收端,首先需要对接收到的信号进行放大、滤波和数字化处理。
通过数字信号处理技术,可以将接收到的信号进行频谱分析、信号提取和干扰抑制等操作。
这一步的主要目的是从众多的干扰中提取出有用的SSR信号,以便后续的分析和处理。
三、二次监视雷达信号的处理二次监视雷达信号的处理是对接收到的信号进行进一步的处理和分析。
在处理过程中,需要对信号进行解码、识别和参数提取等操作。
首先,需要对接收到的应答信号进行解码。
解码的过程中需要知道询问信号的格式和编码方式,以便正确地将应答信号转换为可识别的数据格式。
其次,需要进行信号识别。
通过对比和分析接收到的信号特征,可以确定信号的来源和类型,例如是民用飞机还是军用飞机,以及飞机的位置、高度、速度等信息。
最后,需要提取信号的参数。
这些参数包括飞机的识别码、位置信息、高度和速度等,对于后续的航空交通管理和飞行安全具有重要意义。
四、二次监视雷达信号的分析二次监视雷达信号的分析是对处理后的数据进行进一步的分析和解读。
通过对SSR信号的分析,可以获得更多的关于飞机的信息和交通状况。
首先,可以对飞机的飞行轨迹进行分析和预测。
通过分析多个SSR信号的数据,可以得出飞机的飞行轨迹和运动状态,从而预测其未来的位置和飞行方向。
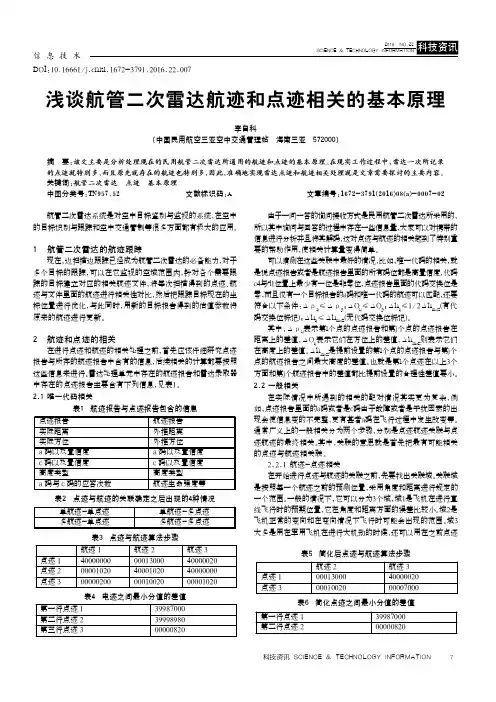
科技资讯2016 NO.22SCIENCE & TECHNOLOGY INFORMATION信 息 技 术7科技资讯 SCIENCE & TECHNOLOGY INFORMATION 航管二次雷达系统是对空中目标鉴别与监视的系统,在空中的目标识别与跟踪和空中交通管制等很多方面都有极大的应用。
1 航管二次雷达的航迹跟踪现在,边扫描边跟踪已经成为航管二次雷达的必备能力,对于多个目标的跟踪,可以在它监视的空域范围内,针对各个需要跟踪的目标建立对应的相关航迹文件,将每次扫描得到的点迹、航迹与文件里面的航迹进行相关性对比,然后把跟踪目标现在的坐标位置进行优化,与此同时,用新的目标报告得到的估值参数将原来的航迹进行更新。
2 航迹和点迹的相关在进行点迹和航迹的相关处理之前,首先应该仔细研究点迹报告与所存的航迹报告中含有的信息,后续相关的计算都要按照这些信息来进行。
雷达处理单元中存在的航迹报告和雷达录取器中存在的点迹报告主要含有下列信息,见表1。
2.1 唯一代码相关由于一问一答的询问接收方式是民用航管二次雷达所采用的,所以其中询问与回答的过程中存在一些信息量,大家可以对携带的信息进行分析并且将其解码,这对点迹与航迹的相关起到了特别重要的帮助作用,使相关计算量变得简单。
可以猜测在这些关联中最好的情况,比如,唯一代码的相关,就是说点迹报告或者是航迹报告里面的所有码位都是高置信度,代码c4与d1位置上最少有一位是非零位,点迹报告里面的代码交换位是零,而且仅有一个目标报告的a码和唯一代码的航迹可以匹配,还要符合以下条件:Δρij ≤Δρp ;ΔO ij ≤ΔO p ;Δh ij ≤1/2Δh max (有代码交换位标记);Δh ij ≤Δh max (无代码交换位标记)。
其中,Δρij 表示第i个点的点迹报告和第j个点的点迹报告在距离上的差值,ΔO ij 表示它们在方位上的差值,Δh max 则表示它们在高度上的差值。

图1雷达头设系统配置图1AMS SIR-S雷达系统概述1.1系统介绍AMS SIR-S雷达系统采用单脉冲技术,使得测角精度大大提高,理论上分析一个雷达回波就可以确定目标的到达角,从而可以大大减少地面站的询问率,使得异步干扰进一步减少。
由于利用OBA信息和更为强大的计算能力,使得雷达录取时抗击假目标和同步干扰目标性能也大大提升,雷达的水平覆盖范围是0.5-256海里,垂直覆盖角度为0.25度—40度,检测概率不小于99%。
AMS SIR-S雷达系统包括天线Science&Technology Vision科技视界101Science &Technology Vision科技视界群,SIR-S 单脉冲二次监视雷达,双雷达头处理器(RHP),雷达维护监视席位,本地控制和监视系统,以及双以太局域网,其连接如图1所示。
1.2发射机单元发射机单元由两个发射机组成:一个为主发射机,也是和通道发射机;一个是辅发射机,也是控制通道发射机。
发射机采用全固态发射机,并且使用了插接式连接。
发射机输出功率衰减分为8个等级,从-12dB,以2dB 为步进,也可以完全关断输出功率。
输出功率可进行方位编程,每周扫描分为128个扇区,相应每个扇区为2.8度。
在每个扇区对P1-P3和P2的输出功率进行控制。
发射机具有BITE(built in test equipment)自检功能,可向RPCM 发送状态报告,并接受RPCM 控制,其检测可到达LRU (least replaceable unit)级别。
发射机的频率为1030MHz+0.01MHz;输出功率大于62dBm。
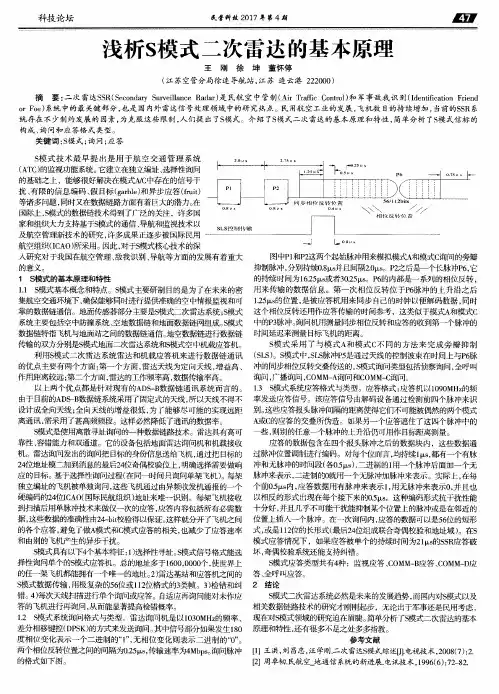
如图2为发射机单元原理方框图。
1.3接收机单元接收机采用全固态接收机,并且使用了插接式连接。
接收机单元包含三个匹配的对数通道,分别是Σ通道,Δ通道和Ω通道。
另外还包括了相位检测器。
三个通道各向RPCM 送出两路视频信号,向相位检测器送出一路视频信号。
二次监视雷达天线HPD—VPD优化测量及应用研究作者:魏月军来源:《电子世界》2013年第06期【摘要】从二次监视雷达测试应用工程的实际背景出发,研究分析了天线水平极化图(HPD)和垂直极化图(VPD)外部测量法与内部测量法的优缺点,以及波瓣发生变形产生的种种后果,进而对外部测量法进行相应的改进。
提出了一套基于RASS—S测试软件结合外场测量法和内部测量法测量二次雷达现场信号的实验方案,对二次雷达上下行链路HPD/VPD进行测量,并对计算处理数据进行分析,证明了数据具有可靠性和有效性。
【关键词】SSR;HPD;VPD;外部测量法;内部测量法二次监视雷达在民航空管领域的重要性勿需置疑,但由于该系统的复杂程度,决定了对其设备各级单元及系统整体性能的测试,带来了一定的难度。
目前中国民航尚未建立起一套完整的、系统性的雷达综合测试系统,更不可能更多地去研究、优化系统测试方法。
同时,目前民航有关部门正在建立空管设备系统测试评估平台,并且有关部门还在筹备建设雷达合资工厂,雷达天线性能测试系统作为其中的一个主要组成部分,如何更好地展开建设,是目前建设者需考虑的一个重要课题。
由此,本文着重从二次雷达天线HPD/VPD测试方案进行研究。
1.二次监视雷达(SSR)工作原理二次雷达为三脉冲体制,它的询问信号为脉幅调制(PAM)信号。
询问脉冲由三个脉冲组成,Pl,P3脉冲为询问信息脉冲,由定向天线发射;P2脉冲为旁瓣抑制脉冲,由全向天线发射。
按照P1和P3脉冲的时间间隔可以分为6种询问模式[1],近代民航的航管二次雷达,一般只用A模式和C模式轮流询问,在雷达显示屏上同时显示出飞机的代号和高度。
我们称这种雷达为A-C模式二次雷达。
2.二次监视雷达天线VPD/HPD测试方法及影响分析二次雷达天线HPD(水平极化图)主要用于测量目标的方位,决定分辨同一距离不同方向上目标的能力和方位精度;VPD(垂直极化图)在二次监视雷达中用于保证不同高度层的距离覆盖,使在正确的高度角发现目标距离最大[2]。
二次监视雷达信号的处理和分析
二次雷达系统是国内民用航空主要的监视手段,在航空运输快速发展的今天,飞行量与日俱增,雷达对航空管制也越来越重要。
与此同时,航空管制雷达在运行过程中暴露出了一些问题,如异步干扰,反射,同步串扰,多径询问应答等问题,这些问题给空中航行的安全带来了隐患。
因此,对这些问题的研究分析以及解决,变得非常重要。
本论文从雷达的概念入手,介绍了雷达的发展历程,阐述了现今民航领域管制雷达的使用情况以及未来的发展趋势。
随后又对雷达的种类进行了叙述,罗列了二次雷达相对于一次雷达的优点,详细的阐述二次雷达的角度测量和距离测量的方法。
文章第三部分介绍了二次雷达系统的基本构成,详细介绍了地面询问设备和接收设备组成,并对各个模块的工作过程进行了解析。
最后,文章从两方面入手,一是,阐述了反射引起的假目标的消除方法,即通过一段时间的数据收集,通过数据得到反射物的具体位置,然后通过命令增加抗反射文件,进行反射物的消除,从而更好的抑制假目标;二是,对同步串扰现象进行MATLAB仿真,接收信号存在的噪声进行小波去噪处理,然后将两个重叠的信号进行分离,从而得到正确的应答编码,并对仿真结果进行分析。
二次雷达系统在民航监视中的应用摘要:随着低空空域的深入利用,不断有新技术应用于空域监视当中,这在一定程度上促进了民航系统的快速发展,本文就主要结合民航监视的实际特点,从我国民航的现状和监视技术发展出发,分析二次雷达系统在民航监视中的应用。
关键词:二次雷达系统;民航监视;应用我国通用航空服务保障体系的建设相对滞后,特别是对于大范围的低空监视服务,目前难以满足民航的快速发展。
为了增强民航监测服务能力,逐步建立和完善我国低空监测服务保障体系,本文详细介绍了二次雷达在我国民航体系中的运用。
一、民航飞机飞行安全的发展现状飞机的飞行安全是我国最为关注的问题。
通过对民航安全的具体研究,发现风切变、湍流和鸟击危险严重影响了飞行安全。
民航业作为我国当前航空业务中不可或缺的一部分,只有增强民航的安全性,才能够从根本上保证我国整体航空业务的稳定发展。
而雷达可以有效地检测飞行中的潜在危险,从而避免飞行事故发生。
但国内对雷达的研究起步较晚,部分雷达的具体应用尚未真正实现。
要把发展民航运输和国家物联网科技结合起来,建立新的雷达探测系统,加强民航雷达的发展。
二、监视技术的分类1、一次监视雷达一次监视雷达是通过雷达自动辐射电磁波,探测来自飞机的电磁波反射信号,对飞机进行定位和跟踪的雷达系统。
空管监视雷达包括短程空管主监视雷达、远程空管主监视雷达和地面监视雷达。
2、二次监视雷达二次监视雷达是一个雷达系统,它通过安装在地面基站上的询问发射机和机载应答器响应信号来定位和跟踪装有机载应答器的飞机(见图1)。
空管二次监视雷达主要包括S模式空管二次监视雷达和A/C模式空管二次监视雷达。
图1二次雷达原理3、多点定位系统MLAT是一种利用多个地面基站接收飞机发出的相同响应信号,并通过各种算法计算各基站接收到的时间差,以实现飞机定位和跟踪的系统。
当多点定位技术应用于终端区域监控时,称为广域多点定位。
4、广播式自动相关监视ADS-B是一种监控技术,它能够在广播模式下通过数据链路自动发送或接收信息,如身份、位置和其他有效数据。
《二次监视雷达信号的处理和分析》篇一一、引言随着航空业的迅猛发展,雷达系统作为现代航空管制与空中交通管理系统的重要一环,起着至关重要的作用。
二次监视雷达(Secondary Surveillance Radar,SSR)作为一种特殊类型的雷达系统,具有高度精准和稳定的监测性能,对空中飞行器进行准确监测与定位。
为了实现这一功能,需要对二次监视雷达信号进行有效的处理和分析。
本文旨在阐述二次监视雷达信号处理和分析的方法与过程,探讨其在航空安全中的应用和意义。
二、二次监视雷达信号的处理1. 信号接收二次监视雷达信号的接收是整个处理过程的第一步。
接收机通过天线接收来自空中飞行器的应答信号,这些信号中包含了飞行器的识别码、高度、速度等关键信息。
接收机将接收到的信号进行初步的放大和滤波处理,以消除噪声干扰。
2. 信号解调经过初步处理的信号需要进行解调处理。
解调是将接收到的信号从调制状态恢复到原始状态的过程。
二次监视雷达的信号通常采用编码方式对信息进行传输,因此需要解调器对信号进行解码处理,提取出原始的识别码和数据信息。
3. 数据分析解调后的数据需要进一步的分析处理。
数据处理中心通过对这些数据的分析和计算,得出飞行器的高度、速度等关键信息,并通过这些信息实现对飞行器的精确跟踪和定位。
此外,数据处理中心还可以对数据进行进一步的处理和优化,以提高信息的准确性和可靠性。
三、二次监视雷达信号的分析1. 识别码分析二次监视雷达信号中的识别码是空中飞行器身份的标识,具有唯一性。
通过对识别码的分析,可以实现对飞行器的快速识别和跟踪。
此外,通过对识别码的统计和分析,还可以了解不同类型飞行器的分布情况和活动规律。
2. 高度和速度分析通过对二次监视雷达信号的处理和分析,可以得出飞行器的高度和速度等关键信息。
这些信息对于航空安全具有重要意义。
通过对高度和速度的实时监测和分析,可以及时发现潜在的飞行安全隐患,并采取相应的措施进行应对和处理。
探析二次监视雷达目标高度跳变现象作者:李牧来源:《中国新通信》 2018年第2期一、航管单脉冲二次雷达目标高度探测航管单脉冲二次监视雷达 (SSR) 由发射机通过天线发射一组询问编码脉冲,当机载应答机收到发射的询问信号后,根据询问的内容(模式A 与模式C),自动回答一串响应询问内容的回答编码脉冲,它由16 个脉(冲)位(置)组成,脉冲位置代号及时间关系图1 所示。
数据脉冲或称信息脉冲由脚标1、2 和4 标注的A,B,C,D,脉冲组成,脚标代表数据脉冲的权值,每个数据脉冲有它的严格的位置。
二、航管单脉冲二次雷达高度码转换响应模式C 询问的回答是高度码。
由于回答高度时D1脉冲位置恒为逻辑0,回答的11 个脉冲有2048 种编码方式,该方式用100 英尺的递增表示从- 1000 英尺到121000 英尺飞行器的气压高度。
高度码的码序是按下述排列:D1D2D4A1A2A4B1B2B4 C1C2C4其中D,A,B,共九位构成标准循环码,按500 英尺递增。
C 共三位形成五周期循环码,按100 英尺递增。
D1 代表了最高位,目前民用航空飞行器尚末达这个飞行高度,所以ICAO 规定D1 位恒为逻辑0。
三、目标高度跳变现象描述2016 年4 月8 日北京时间10:28 分—10:32 分,CSZ9427、CSZ3862 出现高度跳变现象,期间其他目均标正常。
对目标异常情况进行了统计,详见表1。
其中CSZ3862 的识别码为:A1A2C1C4D4;高度码:标准循环码为001100101五进制码:110;8421二进制码为001000110五进制码:110;其C 模式对应的框架脉冲如图2 所示。
CSZ9427 的识别码为:C1C4D4;高度码:标准循环码为000101110 五进制码:011;8421二进制码为000110101五进制码:011;其C 模式对应的框架脉冲如图3 所示。
四、高度跳变原因分析回放原始数据发现,航班CSZ9427、CSZ3862 在高度异常发生时在空间上极其接近,特别是方位偏差很小,不超过2 度。