作业2-轴对称问题的平衡微分方程推导
- 格式:pdf
- 大小:72.40 KB
- 文档页数:1
弹性力学总结第一章绪论一、弹性力学的内容:弹性力学的研究对象、内容和范围。
二、弹性力学的基本量1、外力(1)体力(2)面力2、内力——应力3、应变4、位移以上基本量要求掌握其定义、表达式、分量的符号、正负号规定、量纲。
三、弹性力学中的基本假定1、连续性2、完全弹性3、均匀性4、各向同性以上是对材料性质的假定,凡符合以上四个假定的物体,称为理想弹性体。
5、小变形假定(对物体的变形状态所作的假定)要求掌握各假定的内容和意义(在建立弹性力学基本方程时的作用)。
习题举例:1、弹性力学,是固体力学的一个分支,它的任务是研究弹性体由于受外力作用、边界约束或温度改变等原因而发生的(),从而解决各类工程中所提出的强度、刚度和稳定问题。
A.应力、应变和位移;B.弯矩、扭矩和剪力;C.内力、挠度和变形;D.弯矩、应力和挠度。
2、在弹性力学中,作用于物体的外力分为()。
A.体力和应力;B.应力和面力;C.体力和面力;D.应力和应变。
3、重力和惯性力为(C )。
A .应力;B .面力;C .体力;D .应变。
4、分布在物体体积内的力称为( C )。
A .应力;B .面力;C .体力;D .应变。
5、物体在体内某一点所受体力的集度的表达式及体力分量的量纲为( A )。
A .0lim V F f V∆→∆=∆,-2-2L MT ; B .0lim S F f S ∆→∆=∆,-1-2L MT ; C .0lim A F p A ∆→∆=∆,-1-2L MT ; D .0lim V F f V ∆→∆=∆,-1-2L MT 。
6、弹性力学研究中,在作数学推导时可方便地运用连续和极限的概念,是利用了( )假定。
A .完全弹性;B .连续性;C .均匀性;D .各向同性。
7、( A )四个假设是对物体的材料性质采用的基本假设,凡是符合这四个假设的物体,就称为理想弹性体。
A .完全弹性,连续性,均匀性和各向同性;B .完全弹性,连续性,均匀性和小变形;C .连续性,均匀性,各向同性和小变形;D .完全弹性,连续性,小变形和各向同性。
题提示和答案《弹性力学简明教程》习题提示和参考答案第二章习题的提示与答案2-1 是2-2 是2-3 按习题2-1分析。
2-4 按习题2-2分析。
2-5 在的条件中,将出现2、3阶微量。
当略去3阶微量后,得出的切应力互等定理完全相同。
2-6 同上题。
在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。
其区别只是在3阶微量(即更高阶微量)上,可以略去不计。
2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。
2-8 在大边界上,应分别列出两个精确的边界条件;在小边界(即次要边界)上,按照圣维南原理可列出3个积分的近似边界条件来代替。
2-9 在小边界OA边上,对于图2-15(a)、(b)问题的三个积分边界条件相同,因此,这两个问题为静力等效。
2-10 参见本章小结。
2-11 参见本章小结。
2-12 参见本章小结。
2-13 注意按应力求解时,在单连体中应力分量必须满足(1)平衡微分方程,(2)相容方程,(3)应力边界条件(假设)。
2-14 见教科书。
2-15 见教科书。
2-16 见教科书。
2-17 取它们均满足平衡微分方程,相容方程及x=0和的应力边界条件,因此,它们是该问题的正确解答。
2-18 见教科书。
2-19 提示:求出任一点的位移分量和,及转动量,再令,便可得出。
第三章习题的提示与答案3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解:(1)校核相容条件是否满足,(2)求应力,(3)推求出每一边上的面力从而得出这个应力函数所能解决的问题。
3-2 用逆解法求解。
由于本题中l>>h, x=0,l 属于次要边界(小边界),可将小边界上的面力化为主矢量和主矩表示。
3-3 见3-1例题。
3-4 本题也属于逆解法的问题。
首先校核是否满足相容方程。
再由求出应力后,并求对应的面力。
本题的应力解答如习题3-10所示。
应力对应的面力是:主要边界:所以在边界上无剪切面力作用。
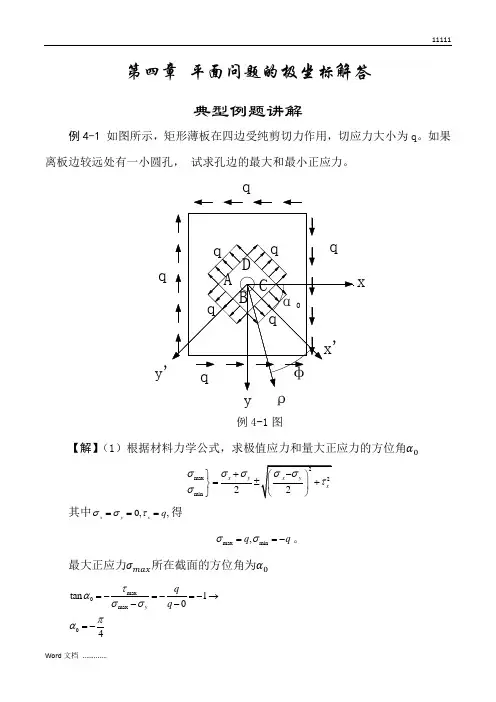
第四章 平面问题的极坐标解答典型例题讲解例4-1 如图所示,矩形薄板在四边受纯剪切力作用,切应力大小为q 。
如果离板边较远处有一小圆孔, 试求孔边的最大和最小正应力。
例4-1图【解】(1)根据材料力学公式,求极值应力和量大正应力的方位角max min 2x y σσσσ+⎫=⎬⎭ 其中0,,x y x q σστ===得max min ,q q σσ==-。
最大正应力 所在截面的方位角为max 0max 0tan 104yqq τασσπα=-=-=-→--=-qqx若在该纯剪切的矩形薄板中,沿与板边成方向截取矩形ABCD ,则在其边界上便承受集度为q 的拉力和压力,如图所示。
这样就把受纯剪切作用的板看作与一对边受拉,另一对边受压的板等效。
(2)取极坐标系如图。
由2222442222cos 2(1)(13),cos 2(13),(4-18)sin 2(1)(13).ρφρφr r σq φρρr σq φρr r τq φρρ⎫=--⎪⎪⎪⎪=-+⎬⎪⎪=--+⎪⎪⎭得矩形薄板ABCD 内的应力分量为()()()2222442222cos 2(1)(13)cos 2(13)sin 2(1)(13)ρφρφa a σq φa ρρa σq φb ρa a τq φc ρρ=--=-+=--+ 其中 为小孔的半径,而孔边最大与最小正应力由式(b ),在 处得到44cos 2(13)4cos 2,φa σq φaϕ=-+=-当 , 时,孔边最小正应力为,当时,孔边最大正应力为。
分析:矩形板ABCD 边界上各点的应力状态与板内无孔时的应力状态相同。
也可以应用叠加法,求解薄板的各种较复杂的平面应力(应变)问题。
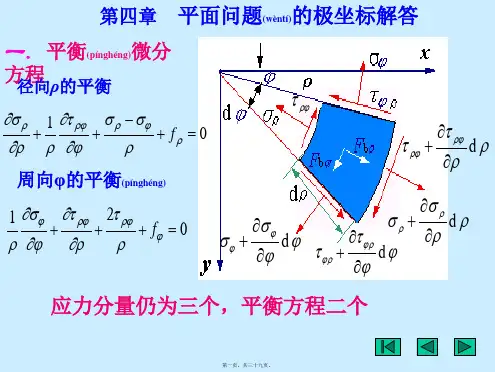
习题全解4-1试比较极坐标和直角坐标中的平衡微分方程、几何方程和物理方程,指出哪些项是相似的,哪些项是极坐标中特有的?并说明产生这些项的原因。
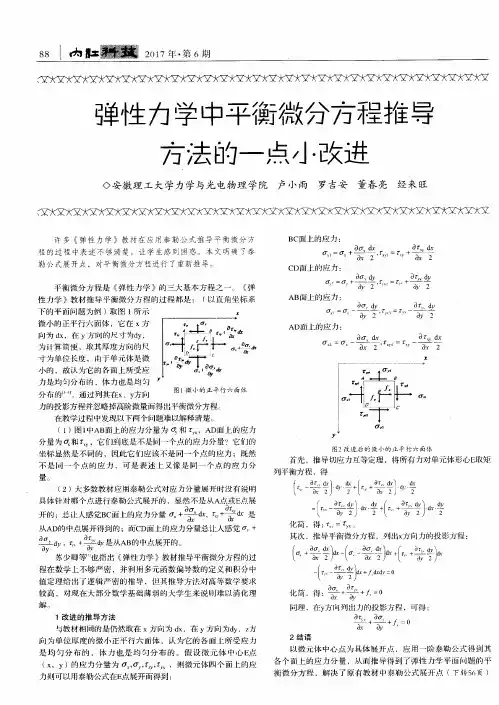
【解】 (1)极坐标,直角坐标中的平衡微分方程10210f f ρρϕρϕρρϕϕρϕϕστσσρρϕρτστρρϕρ∂∂-⎧+++=⎪∂∂⎪⎨∂∂⎪+++=⎪∂∂⎩ 00yxx x y xy yf xy f y x τσστ∂⎧∂++=⎪∂∂⎪⎨∂⎪++=⎪∂∂⎩将极坐标中的平衡微分方程与直角坐标中的平衡微分方程相比较,第一式中,前两项与直角坐标相似;而项是由于正 面上的面积大于负 面上的面积而产生的,是由于正负 面上的正应力 在通过微分体中心的 方向有投影而引起的。

轴对称应力状态分析当作用力对称分布于回转体时,其内部的应力状态称为轴对称应力状态,轴对称应力状态的特点是:(1)通过旋转体轴线的子午面在变形过程中始终不会扭曲,所以在θ面上没有剪应力,即pθτ=Zθτ=0,所以θσ就是一个主应力。
(2)各应力分量与θ坐标无光,对θ的偏导数为零。
采用圆柱坐标系时,轴对称的应力张量为:ij 0=000P ZPP ZZ θσσσσ⎛⎫ ⎪ ⎪ ⎪⎝⎭ττ设点a 的坐标为(P ,θZ),应力状态为ijσ,a 1的坐标为(p p d +,d θθ+,z z d +),应力状态为ij ijd σσ+,即z z z ij ij z zzzzzz z z=zzz z d d d d d d d d d d θθθθθθθθθθσσθθσσσσθθσθσθ∂∂∂⎛⎫+++⎪∂∂∂⎪∂∂∂ ⎪++++ ⎪∂∂∂⎪∂∂∂ ⎪+++ ⎪∂∂∂⎝⎭ρρρρρρρρρρττρττρτττρτρτττρτρ 根据力的平衡条件=P ∑ρ0;=0P θ∑;=0Z P ∑,可得以下圆柱坐标系的平衡微分方程为:z zzz 0z 0z θσσσσ∂∂-⎫++=⎪⎪∂∂⎬∂∂⎪++=⎪∂∂⎭ρρρρρτρρττρρ在有些轴对称问题(例如圆柱体的均匀镦粗、挤压和拉拔等)中,由于=d d ρθεε,由增量理论可知,当某两个正应变增量的分量相等时,其对应的应力也相等,所以=ρθσσ。
那么轴对称的平衡方程可简化为:z zz z =0z =0z ρρρρσρσρρ∂∂⎫+⎪∂∂⎪⎬∂∂⎪++⎪∂∂⎭τττ轴对称的屈服应力: 1 Tresca 屈服准则Tresca 认为当最大剪应力达到某定值时材料就会发生屈服,开始塑性变形阶段,即 max cτ=,由于屈服时的定值c 与应力状态无光,故可由单周俊宇拉伸实验或薄壁管扭转实验确定。
单向均匀拉伸中230σσ==,屈服时1sσσ=,所以最大剪应力为:13113222scσσσστ-====,该剪应力也应等于纯剪屈服时的剪应力k ,所以当假定 123σσσ≥≥,塑性条件可写成31==2ks σσσ-,该公式同样可用于轴对称问题中。


空间轴对称问题的基本微分方程在描述轴对称问题各分量时,用圆柱坐标r 、θ、z 比用直角坐标x 、y 、z 方便得多,如以z 轴为对称轴,如图1所示则所有应力分量、应变分量和位移分量都将只是r 和z 的函数,不随θ而变。
如图,取微小六面体。
注意到应力分量是(r ,z )将各面上的应力分量写出。
单位体积内的体积力在r 、z 方向的分量分别表示为r f 、z f 。
根据单元体在r和z 方向的平衡方程,略去高阶微量,同时除以rdrd dz θ,因为d θ很小,近似认为()sin 22d d θθ≈,加以整理后得到r 方向和z 方向的平衡微分方程为: 图1柱坐标下微小六面体r r z 0r 0zr r rz rz z f z rf z r r θστσσσττ∂∂-⎫+++=⎪⎪∂∂⎬∂∂⎪+++=⎪∂∂⎭公式(1) 进一步推导空间轴对称问题的几何变形方程:设u 、w 分别代表r 及z 轴方向的位移分量,由极坐标内位移与应变的关系以及直角坐标的关系式,很容易得到r u r ∂∂=ε,r u =θε,z w z ∂∂=ε,0==z r θθγγ,rw z u rz ∂∂+∂∂=γ 公式(2) 最后,根据广义胡克定律,可得出物理方程:1[()]1[()]1[()]2(1)r r z r z z z r rz rz rz EEEG E θθθθεσμσσεσμσσεσμσστμγτ⎫=-+⎪⎪⎪=-+⎪⎬⎪=-+⎪⎪+==⎪⎭公式(3) 或 ()()2112112()()2112112()()2112112()2(1)2(1)r r r z z z rz rz rz E E u e e e G r E E u e e e G r E E w e e e G z E E u w G z rθθθμμσελεμμμμμμσελεμμμμμμσελεμμμμτγγμμ∂⎫=+=+=+⎪+-+-∂⎪⎪=+=+=+⎪+-+-⎪⎬∂⎪=+=+=+⎪+-+-∂⎪∂∂⎪==+=⎪++∂∂⎭ 公式(4) 式中,r z u u w e r r z θεεε∂∂==++∂∂++为体积应变。
平衡微分方程推导过程平衡微分方程,听上去是不是很复杂?但其实它就像一杯混合了各种果汁的饮料,调和得好喝,调和得不好就苦涩难咽。
咱们今天就来聊聊这个神奇的东西,让它不再那么神秘,轻松搞定。
微分方程可不是外星人的语言,而是我们描述变化的工具。
想想吧,生活中处处都有变化,时间在走,温度在升,心情在起伏。
微分方程就像一个记录这些变化的日记,帮我们把这些故事讲出来。
平衡微分方程则是这个故事中的主人公,特别关注系统在特定条件下如何达到一种稳定的状态。
就像是你在阳台上浇花,水多了,花儿会淹死;水少了,花儿又会干死。
适量的水才能让花儿茁壮成长,这就是平衡的美妙之处。
在数学的世界里,平衡微分方程通常以一种简洁的形式出现。
想象一下,咱们有一个方程,里面有变量和常数,像调料一样。
我们通常会看到类似这样的一种形式:dy/dt = f(y),其中dy/dt表示随时间变化的东西,f(y)则是我们要研究的变化率。
很简单吧?就像煮汤,先把水煮开,再加点盐,最后加点青菜。
这个f(y)就是咱们汤里的调味料,关键在于它如何影响整个汤的味道。
好啦,接下来就让我们来玩一个小游戏。
想象一下你有一个气球,你不停地往里吹气。
最开始,气球鼓起来的速度很快,过了一段时间,气球的膨胀速度会慢下来,直到最终达到一个平衡点。
这个过程就可以用平衡微分方程来描述。
乍一看好像是个无聊的过程,但其实每一秒都有故事发生。
气球的表面张力、空气的压强、你的嘴巴的力量,都是这个故事里的角色。
把这些因素放到微分方程里,最终得到的就是平衡方程。
一旦我们写下了这些微分方程,接下来就是解它。
别紧张,解微分方程就像解谜一样,慢慢来,细心点。
我们会找到一个叫做平衡点的地方,没错,就是那些让系统保持稳定的点。
可以想象成是一座山的山顶,只有到达那个点,才能看到美丽的风景。
平衡点通常是让dy/dt等于零的地方,也就是那种你不需要再费劲去加水的状态。
解决微分方程时,我们可能需要使用一些技巧,比如分离变量法,或者是代数方法,听上去是不是很高深?其实这些方法就像是厨房里的工具,有刀有勺,总有一种适合你。
二 平衡微分方程的积分形式分别对流体平衡微分方程乘dz dy dx ,,相加,则有)(Zdz Ydy Xdx dz zp dy y p dx x p ++=∂∂+∂∂+∂∂ρ 取全微分 )(Z d z Y d y X d x dp ++=ρ根据数学原理,=ρconst 时,)(Zdz Ydy Xdx ++必须为某标量函数的全微分。
设标量函数为W ,则有)(dz zWdy y W dx x W dW dp ∂∂+∂∂+∂∂==ρρ Z zWY y W X x W =∂∂=∂∂=∂∂,, 由上式可知,),,(z y x W 是描述质量力的标量函数,称为力势函数。
由势函数决定的力称为有势力。
重力作用的空间称为重力场,为有势场。
积分式(2.2-10),则有c W p +=ρ (*)若某点(000,,z y x )势函数为0W 时压强为0p ,则00W p c ρ-=,则)(00W W p p -+=ρ三 流体静力学基本方程a 、自由液面上的正向坐标系b 、自由液面上的反向坐标系c 、自由液面下0z 处的正向坐标系图 2-5 静止液体在不同坐标系的势能① *式即是流体静力学的基本方程,在图2-5(a )中,取0===z y x ,00=W ,a p p =0;单位质量的液体势能gz W -=(z 与g 反向),则有gz p p a ρ-=注意到h z =-,则有h p gh p p a a γρ+=+=② 在图2-5(b)中,在0===z y x 点,00=W ,a p p =0,在坐标z单位质量势能为gz W =,则有h p gz p p a a γρ+=-+=)0(③ 在图2-5(c)中,边界条件为:0===z y x ,势函数00=W ,gz W -=(z 与g 反向);则有z p W p p γρ-=+=00另一边界条件为a p p z z y x ====,,00,势函数0gz W -=,由式(2.2-16)可得0000z p gz p p a γρ-=-=则有 h z z z z p p a γγγγ=-=+-=-)(00,即h p p a γ+=通过如上分析可知:c W p +=ρ是一般表达式,更一般的表达式:=+γpz const =+=+γγ2211p z p z const证明如下:参看图2-6图 2-6 流体中两点压差11h p p a γ+= 22h p p a γ+=由上两式则有)()(122121z z h h h p p -=∆=-=-γγγ移项则有⇒⇒+=+2211z p z p γγ γγ2211p z p z +=+由于1z 和2z 的任意性,故有⇒⇒=+=+const p z p z γγ2211 const pz =+γ几何含义:在静止流体中单位重量的流体的压力能γ/p 和位置势能z 可以互相转化,总和不变。