弹塑性力学 4 平衡微分方程和边界条件
- 格式:ppt
- 大小:227.00 KB
- 文档页数:10
第四章一、线性弹性理论适定问题的基本方程和边界条件对于线弹性体小变形的线性问题,建立了一组线性方程组可以描述为在S 为边界的域V 上以u ,ε,σ作为求解变量的偏微分方程边值问题:微分提法2变分提法积分提法第四章第四章适定问题:第四章均匀变形状态()()1222111 1d d E c d d E c νν−=−=第四章弹性力学的基本方程和解法一、线性弹性理论适定问题的基本方程和边界条件 适定问题与非适定问题简例蓝色:边界给定量红色:边界未知量6适定问题例一第四章蓝色:边界给定量红色:边界未知量7适定问题例二第四章蓝色:边界给定量红色:边界未知量8适定问题例三边界全部给定面力时约束刚体位移才能求得确定位移边界全部给定面力时给定面力和体积力必须整体平衡第四章蓝色:边界给定量红色:边界未知量9非适定问题例一有多余边界条件情况一般无解第四章蓝色:边界给定量红色:边界未知量10非适定问题例二边界条件识别(逆问题)复杂!第四章 1.3 界面连续条件第四章弹性力学的基本方程和解法一、线性弹性理论适定问题的基本方程和边界条件II I u u =IIIi i u u =位移面力3个条件0t t =+II I 0II II I I =+ji j ji j n n σσIII S IIS +−u3个条件+12∀X ∈S It I I t0)(II I I =−ji ji j n σσ界面连续条件应为边界条件个数的两倍I S第四章第四章第四章第四章第四章第四章第四章第四章第四章第四章第四章。
弹塑性力学简答题2002年1 什么是偏应力状态?什么是静水压力状态?举例说明?P24静水压力状态时指微六面体的每个面只有正应力作用,应力大小均为平均应力。
偏应力状态是从应力状态中扣除静水压力后剩下的部分。
2 从数学和物理的不同角度,阐述相容方程的意义。
P48从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。
从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入",即产生不连续。
3 两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么?相同。
应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。
4 虚位移原理等价于哪两组方程?推导原理时是否涉及到物理方程?该原理是否适用于塑性力学问题?P156平衡微分方程和静力边界条件。
不涉及物理本构方程。
适用于塑性力学问题。
5 应力状态是否可以位于加载面外?为什么?P239当应力状态从加载面上向加载面外变化时,将产生新的塑性变形,引起内变量增加,这时,加载面会随之改变,使得更新的应力状态处在更新的加载面上.6 什么是加载?什么是卸载?什么是中性变载?中性变载是否会产生塑性变形?P250加载:随着应力的增加,应变不断增加,材料在产生弹性变形的同时,还会产生新的塑性变形,这个过程称之为加载。
卸载:当减少应力时,应力与应变将不会沿着原来的路径返回,而是沿接近于直线的路径回到零应力,弹性变形被恢复,塑性变形保留,这个过程称之为卸载。
中性变载:应力增量沿着加载面,即与加载面相切.应力在同一个加载面上变化,内变量将保持不变,不会产生新的塑性变形,但因为应力改变,会产生弹性应变。
7 用应力作为未知数求解弹性力学问题时,应力除应满足平衡方程外还需要满足哪些方程?P93协调方程和边界条件。
8 薄板弯曲中,哪些应力和应变分量较大?哪些应力和应变分量较小?P121平面内应力分量(x y xy σστ、、)最大,最主要的是应力,横向剪应力(z y xz ττ、)较小,是次要的应力;z 方向的挤压应力z σ最小,是更次要的应力。

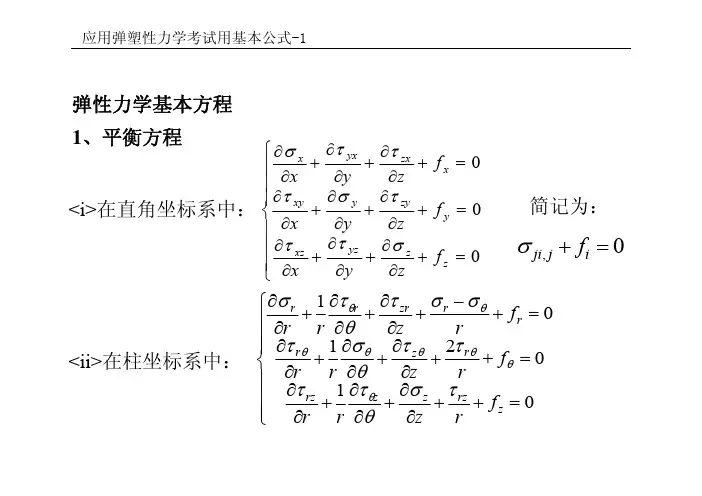
弹性力学基本方程平衡微分方程:0⋅+=σ∇f指标符号写为,0ji j i f σ+=在直角坐标系中分量形式311121112332122221231323333123000f x x x f x x x f x x x σσσσσσσσσ⎧∂∂∂+++=⎪∂∂∂⎪⎪∂∂∂+++=⎨∂∂∂⎪⎪∂∂∂+++=⎪∂∂∂⎩在柱坐标系中分量形式1012010r r r rz r r zr z zr z rzz f r r z rf r r z r f r r z r θθθθθθθθτσσστθτσττθττστθ∂-∂∂⎧++++=⎪∂∂∂⎪∂∂∂⎪++++=⎨∂∂∂⎪∂∂∂⎪++++=⎪∂∂∂⎩在球坐标系中分量形式211cot 0sin 113cot 0sin 1132cot 0sin r r r r r r r r r r f r r r r r f rr r r r f r r r r r ϕθϕθθθϕθϕθθθθϕϕθϕϕϕθϕτσσσττσθθθϕτσστστθθθϕττσττθθθϕ∂--⎧∂∂+++++=⎪∂∂∂⎪⎪∂-∂∂⎪+++++=⎨∂∂∂⎪⎪∂∂∂+++++=⎪∂∂∂⎪⎩几何方程:1()2=+ε∇∇u u指标符号写为,,1()2ij i j j i u u ε=+在直角坐标系中分量形式1211221112113222223322333313331133131()21()21()2u u u x x x u u u x x x u u u x x x εεεεεεεεε⎧⎧∂∂∂==+=⎪⎪∂∂∂⎪⎪⎪⎪∂∂∂===+⎨⎨∂∂∂⎪⎪⎪⎪∂∂∂===+⎪⎪∂∂∂⎩⎩在柱坐标系中分量形式111r r z z zr u u v v r r r r v u v w r r z r w w u z r z θθθεγθεγθθεγ∂∂∂⎧⎧==+-⎪⎪∂∂∂⎪⎪∂∂∂⎪⎪=+=+⎨⎨∂∂∂⎪⎪∂∂∂⎪⎪==+⎪⎪∂∂∂⎩⎩在球坐标系中分量形式1111sin 11sin sin r rr r r r r r u u u u r r r r u u u u ctg u r r r r r u u ctg u u u u r r r r r r θθθϕθθθθϕϕϕϕϕϕθϕγεθθεγθθϕθθεγθϕθϕ⎧⎧∂∂∂=+-=⎪⎪∂∂∂⎪⎪⎪∂∂∂⎪=+=+-⎨⎨∂∂∂⎪⎪∂⎪⎪∂∂=++=+-⎪⎪∂∂∂⎩⎩应变协调方程:0⨯⨯=ε∇∇指标符号写为,0mjk nil ij kl e e ε=在直角坐标系中常用形式222112212222112222332322223223222331311221313223311112231123231232212312231233120001()21()21x x x x x x x x x x x x x x x x x x x x x x x x x x εεγεγεεγεγγεγγγεγε∂∂∂+-=∂∂∂∂∂∂∂+-=∂∂∂∂∂∂∂+-=∂∂∂∂∂∂∂∂∂=-++∂∂∂∂∂∂∂∂∂∂∂=-++∂∂∂∂∂∂∂=∂∂2331123312()2x x x x γγγ⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪∂∂∂∂-++⎪∂∂∂∂⎩本构方程::=σεC指标符号写为ij ijkl klC σε=对各向同性弹性体的线弹性本构关系的指标符号写为2ij ij kk ijG σελεδ=+在直角坐标系中分量形式222x x yy z z xy xy yz yz zx zxG G G G G G σελθσελθσελθτγτγτγ=+⎧⎪=+⎪⎪=+⎪⎨=⎪⎪=⎪=⎪⎩边界条件:力边界条件指标形式写为 j i ijp νσ=在指标坐标系分量形式x yx zx xy y zy xz yz z X l m n Y l m n Z l m n στττστττσ⎧=++⎪⎪=++⎨⎪=++⎪⎩位移边界条件指标形式写为 i iu u =在直角坐标系分量形式112233u u u u u u ⎧=⎪⎪=⎨⎪=⎪⎩位移解法:L-N 方程及力边界条件指标形式,,,,,()0[()]i jj j ji i i j j i k k ij j iGu G u f G u u u X λλδν+++=++=在直角坐标系中分量形式212223()0()0()0(2)()()()(2)()()()(2)G u G f x G v G f y G w G f z u v u w uG l G m G n X x x y x z u v v w vG l G m G n Yy xy y z u w v w wG l G m G n Zz xz y z θλθλθλλθλθλθ⎧∂∇+++=⎪∂⎪∂⎪∇+++=⎨∂⎪⎪∂∇+++=⎪∂⎩⎧∂∂∂∂∂+++++=⎪∂∂∂∂∂⎪⎪∂∂∂∂∂+++++=⎨∂∂∂∂∂⎪⎪∂∂∂∂∂+++++=∂∂∂∂∂⎩⎪应力解法:B-M 方程指标形式2,,,,1()11ij ij i j j i ij k kf f f νσδνν∇+Θ=-+-+-平面问题本构方程平面应变平面应力平面应力(极坐标系)αβαβαβδλεεσkk G +=2, 平面应力→平面应变:21υ-→E E 、υυυ-→1xyxyx y y y x x G G G γτευυευυσευυευυσ=-+--=-+--=)1(21)1(2)1(21)1(2 xyxyx y y y x x G G Gγτυεευσυεευσ=+-=+-=)(12)(12 θθθθθγτυεευσυεευσr r r r r G G G=+-=+-=)(12)(12 0)()(==+=+=zx zx y x y x z ττεελσσυσ===zx zx z ττσ0=z σ 0==θττz zrαβαβαβδσυσυεkk EE -+=1 xyxy xy x y y y x x GE E τεγσυυσυεσυυσυε12)1(1)1(122==---=---= xyxy xy x y y y x x GEEτεγυσσευσσε12)(1)(1==-=-=θθθθθτγυσσευσσεr r r r r GE E1)(1)(1=-=-====zy zx z γγε)(==+-=zy zx y x z Eγγσσυε)(θσσυε+-=r z E0==θγγz z r协调方程:y x yx xy x y ∂∂∂=∂∂+∂∂γεε22222,0112112222222=∂∂-∂∂-∂∂+∂∂∂-∂∂+∂∂θγεεθγθεεθθθθr r r r r r r r r r r r r))(1()(,,2y y x x y x f f ++-=+∇νσσ,如x x V f ,-=,y y V f ,-=,引入Airy 应力函数:V yy x +=,φσ V xx y +=,φσ,xy xy,φτ-=→V 222)1(∇--=∇∇νφ;22222yx ∂∂+∂∂=∇,4422444222yy x x ∂∂+∂∂∂+∂∂=∇∇极坐标系:02101=++∂∂+∂∂=+-+∂∂+∂∂θθθθθθτθστσσθτσf rr r f r r r r r r r r rrv r v u r ru v r r u r r rr r θθθθθθγθεε-∂∂+∂∂=+∂∂=∂∂=11 ,⎪⎭⎫ ⎝⎛∂∂∂∂-=∂∂=∂∂+∂∂=θφτφσθφφσθθr r rr r r r r 1 ,1122222V222)1(∇--=∇∇νφ,22222211θ∂∂+∂∂+∂∂=∇r r r r,⎪⎪⎭⎫⎝⎛-⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛θθθθσττσθθθθσττσθθθcos sin sin cos cos sin sin cos r r ry xyxy x塑性力学基本公式:一维随动强化模型材料后继屈服限与先期拉(压)塑性应变的关系**p s ps h d h d σσεσσε+-=+=-+⎰⎰一维等向强化模型材料后继屈服限与先期拉(压)塑性应变的关系***||p s h d σσεσσ+-+=+=-⎰应力偏量的第二不变量22222222112222333311122331221'21'[()()()6()]6'3'ij ij ijij J S S J J S J σσσσσστττσσ==-+-+-+++∂=∂=应变偏量的第二不变量2222222211222233331112233121'213'[()()()()]624'3ij ijI e e I I εεεεεεγγγε==-+-+-+++=金属材料的屈服条件:Mises 屈服条件2()03'ij s J σσσσ-==其中Tresca 屈服条件max ()02sij στσ-=三维随动强化模型后继屈服条件(,)()0p p pij ij ij s ij ij K c d σσσεσεεΦ=--==⎰其中三维等向强化模型后继屈服条件41(,)()()0032p p p pij ij s ij ij K h d d d d σσσσεεεεΦ=-+==⋅≥⎰其中全量形式的应力-应变关系2()1()33ij kk ij ij kk ij K σεσεδεεδε=+-全量形式的应变-应力方程13()1()923ij kk ij ij kk ij K εσεσδσσδσ=+-σε-关系为**3,3(),33',122(1)'3s s ss G GE G G E EE G E E E σεεσσσσεενν⎧⋅<⎪⎪=⎨⎪+->⎪⎩==-+-增量形式的应变-应力方程(指标符号)()011ij ij kk ij ij d d d d S E ευσυσδλ⎡⎤=+-+⎣⎦增量形式的应力-应变方程(矩阵形式)0000T e e e ep T e D D d D d D d D ασσασεεσαασ⎛⎫=-= ⎪⎝⎭线性等向强化材料加载时的增量本构关系(指标符号)()()0020191114ij ij kk ij kl kl ij d d d S d S E h ευσυσδσσ⎡⎤=+-+⎣⎦线性等向强化材料加载时的增量本构关系(矩阵形式)()()000209114T e ep d F d d F d hεσασσασσσσ=+=。
[平衡微分方程的适用范围]平衡微分方程平衡微分方程的适用范围弹性力学、塑性力学、弹塑性力学。
张量:怎样判断?商判则:和任意矢量点积为K-1阶张量的量一定为K 阶张量。
能否满足分量转换规律是判断某个数的集合是否表示一个张量的基本准则。
3、n 维张量的举例标量零阶张量,矢量为一阶张量,应力、应变为二阶张量,应力、应变之间的弹性关系可用四阶张量表示。
4、▽的意义?▽为一个梯度,▽2为调和算子,▽4为重调和算子。
5、柯西应变张量与格林应变张量的区别?柯西应变张量适用于线弹性小变形,格林应变张量适用于任何情况。
6、任意斜面上的应力的本质是?平衡微分方程和转轴公式。
7、如何描述正应变,剪应变,体积应变,应力的球张量,应力的偏张量?对于各向同性材料,正应力引起正应变,引起线元长度变化;剪应力引起剪应变,引起角度的变化;应力的球张量,只引起体积变化,不会引起形状的变化;应力的偏张量,只引起形状变化,不会引起体积的变化。
动力学的平衡微分方程如何表示?根据达朗贝尔原理,把惯性力当作体力来满足力平衡和力矩平衡条件。
9、转轴公式的理论依据:柯西公式。
10、等效应力、等效应变物理意义、公式:等效应力将6个应力分量的对变形体的作用,等效于一个单向拉伸力的作用;等效应变将6个应变分量等效于一个单向拉伸力所产生的应变。
利用实验,就可以直接建立等效应变与等效应力的数值关系11、体积不可压:从体积弹性模量来看,当时,K 趋向于无穷大,也就是说体积变化无限小,即表示体积不可压缩。
12、为什么等值拉压是纯剪切等值拉压时,线元只有角度发生变化,长度有发生变化,故等值拉压是纯剪切。
13、里茨和伽辽金法的物理思想均是利用利用最小势能原理,寻找满足约束边界条件的试验函数。
14、弹性力学为什么可用逆解法、半逆解法:解的唯一性定理表明,无论用什么方法求得的解,只要能满足全部基本方程和边界条件,就一定是问题的真解。
15、叠加原理建立在什么条件下:基本方程和边界条件满足线弹性条件,举例:在线弹性条件下,复杂问题可通过简单叠加处理。
弹塑性力学总结弹塑性力学的任务是分析各种结构物或其构件在弹性阶段与塑性阶段的应力与位移,校核它们是否具有所需的强度、刚度与稳定性,并寻求或改进它们的计算方法。
并且弹塑性力学是以后有限元分析、解决具体工程问题的理论基础,这就要求我们掌握其必要的基础知识与具有一定的计算能力。
通过一学期的弹塑性力学的学习,对其内容总结如下:一、弹性力学1、弹性力学的基本假定求解一个弹性力学问题,通常是已知物体的几何形状(即已知物体的边界),弹性常数,物体所受的外力,物体边界上所受的面力,以及边界上所受的约束;需要求解的是物体内部的应力分量、应变分量与位移分量。
求解问题的方法是通过研究物体内部各点的应力与外力所满足的静力平衡关系,位移与应变的几何学关系以及应力与应变的物理学关系,建立一系列的方程组;再建立物体表面上给定面力的边界以及给定位移约束的边界上所给定的边界条件;最后化为求解一组偏分方程的边值问题。
在导出方程时,如果考虑所有各方面的因素,则导出的方程非常复杂,实际上不可能求解。
因此,通常必须按照研究对象的性质,联系求解问题的范围,做出若干基本假定,从而略去一些暂不考虑的因素,使得方程的求解成为可能。
(1)假设物体是连续的。
就是说物体整个体积内,都被组成这种物体的物质填满,不留任何空隙。
这样,物体内的一些物理量,例如:应力、应变、位移等,才可以用坐标的连续函数表示。
(2)假设物体是线弹性的。
就是说当使物体产生变形的外力被除去以后,物体能够完全恢复原来形状,不留任何残余变形。
而且,材料服从虎克定律,应力与应变成正比。
(3)假设物体是均匀的。
就是说整个物体是由同一种质地均匀的材料组成的。
这样,整个物体的所有部分才具有相同的物理性质,因而物体的弹性模量与泊松比才不随位置坐标而变。
(4)假设物体是各向同性的。
也就是物体内每一点各个不同方向的物理性质与机械性质都是相同的。
(5)假设物体的变形是微小的。
即物体受力以后,整个物体所有各点的位移都小于物体的原有尺寸,因而应变与转角都远小于1。
第四章本构方程在前面的章节中,已经建立了变形体的平衡微分方程和几何方程,分别是从静力学方面和从几何学方面考察了变形体的受力和变形。
但是只有这些方程还不足以解决变形体内的应力和变形问题。
对于变形体,未知变量包括6个应力分量,6个应变分量和3个位移分量,一共有15个未知函数,而平衡方程和几何方程一共是9个,未知函数的个数多于方程数。
因此还必须研究物体的物理性质,即应力与应变之间的关系。
通常称这种关系为变形体的本构方程,或称为物性方程。
塑性本构包括三个方面:1、屈服条件,2、流动法则,3、硬化关系;其中屈服条件:判断何时达到屈服,流动法则:屈服后塑性应变增量的方向,也即各分量的比值,硬化规律:决定给定的应力增量引起的塑性应变增量大小。
以上构成塑性本构关系。
4.1弹性应变能函数变形固体的平衡问题不仅需要运动微分方程、应变—位移方程(即变形几何方程)还需要将应变分量和应力张量分量联系起来,方能给定物体的材料抵抗各种形式变形的规律。
该规律的理论解释需要对分子间力的本质有深入的认识,该分子力力图使固体粒子间保持—定的距离,也就是需要对固体中应力分量和应变分量有深入的认识。
这种作用机理在非常接近稳定状态的气体中己弄清楚,但对于弹性体情况,目前科学技术发展水平还不能解决这一难题。
如要通过实验探求物体内部的应力和应变的关系,则总是从一些量的测量来推理得到,在一般情况下,这些量并非应力或应变的分量(例如平均应变、体积压缩、物体表面一线元的伸长等等).因此,在现时应力与应变关系主要是通过直接实验建立。
然而该关系中的某些固有的一般特性可以在理沦上加以说朋,如能量守恒定律为应力-应变关系的理论研究提供了基础。
1.1应变能密度假设变形的过程是绝热的,也就是在变形过程中系统没有热的损失,而且假设物体中任意无穷小单元改变其体积和形状所消耗的功与其从未变形状态到最终变形状态的转换方式无关。
这个条件是弹性的另一种定义。
换句话说,就是假设物体粒子互相作用过程中的耗散(非保守)力的作用与保守力的作用相比是可以忽略的。