第11章 约束问题的线性化方法
- 格式:ppt
- 大小:1.51 MB
- 文档页数:49

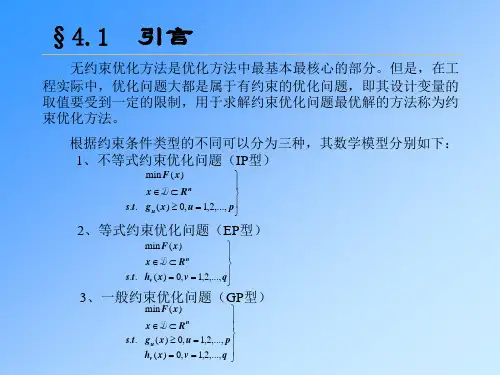
约束方程的建立方法
一、定义变量和参数
在建立约束方程之前,首先需要明确定义问题中的变量和参数。
变量通常包括决策变量、状态变量等,而参数则可以是常数或非常数。
决策变量通常是问题中需要求解的未知数,状态变量则是描述系统状态的变量。
二、建立数学模型
建立数学模型是约束方程建立过程中的重要步骤。
数学模型通常由方程式或不等式组成,用于描述变量之间的关系。
在建立数学模型时,需要选择适当的数学工具和方法,如微积分、线性代数、优化理论等。
三、考虑边界条件
边界条件是指对问题的某些约束或限制条件。
例如,某个变量的取值范围、函数的极值条件等。
在建立约束方程时,需要考虑这些边界条件并将其纳入方程中。
四、处理复杂模型
对于复杂模型,可能需要采用分治策略或逐步逼近法进行求解。
分治策略是将问题分解为若干个子问题,分别求解后再综合得到原问题的解。
逐步逼近法则是通过逐步改进逼近值来求解问题。
五、验证与求解
建立约束方程后,需要对所建立的方程进行验证,确保其正确性和可行性。
验证过程中可以采用代数方法、数值模拟等方法。
一旦验证通过,就可以采用适当的求解方法对约束方程进行求解,以得到问题的解。

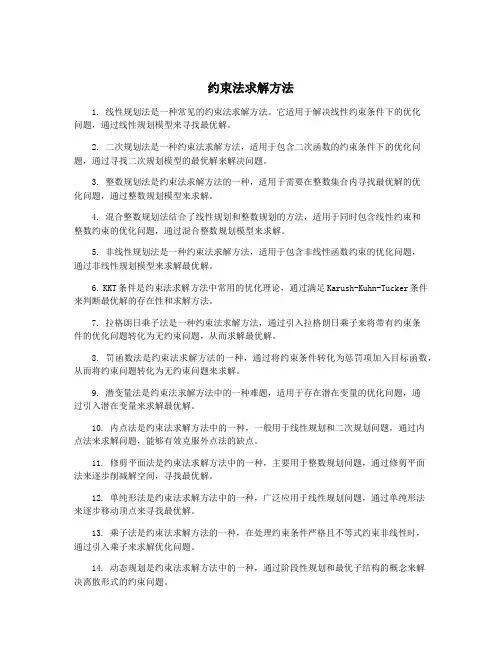
约束法求解方法1. 线性规划法是一种常见的约束法求解方法。
它适用于解决线性约束条件下的优化问题,通过线性规划模型来寻找最优解。
2. 二次规划法是一种约束法求解方法,适用于包含二次函数的约束条件下的优化问题,通过寻找二次规划模型的最优解来解决问题。
3. 整数规划法是约束法求解方法的一种,适用于需要在整数集合内寻找最优解的优化问题,通过整数规划模型来求解。
4. 混合整数规划法结合了线性规划和整数规划的方法,适用于同时包含线性约束和整数约束的优化问题,通过混合整数规划模型来求解。
5. 非线性规划法是一种约束法求解方法,适用于包含非线性函数约束的优化问题,通过非线性规划模型来求解最优解。
6. KKT条件是约束法求解方法中常用的优化理论,通过满足Karush-Kuhn-Tucker条件来判断最优解的存在性和求解方法。
7. 拉格朗日乘子法是一种约束法求解方法,通过引入拉格朗日乘子来将带有约束条件的优化问题转化为无约束问题,从而求解最优解。
8. 罚函数法是约束法求解方法的一种,通过将约束条件转化为惩罚项加入目标函数,从而将约束问题转化为无约束问题来求解。
9. 潜变量法是约束法求解方法中的一种难题,适用于存在潜在变量的优化问题,通过引入潜在变量来求解最优解。
10. 内点法是约束法求解方法中的一种,一般用于线性规划和二次规划问题,通过内点法来求解问题,能够有效克服外点法的缺点。
11. 修剪平面法是约束法求解方法中的一种,主要用于整数规划问题,通过修剪平面法来逐步削减解空间,寻找最优解。
12. 单纯形法是约束法求解方法中的一种,广泛应用于线性规划问题,通过单纯形法来逐步移动顶点来寻找最优解。
13. 乘子法是约束法求解方法的一种,在处理约束条件严格且不等式约束非线性时,通过引入乘子来求解优化问题。
14. 动态规划是约束法求解方法中的一种,通过阶段性规划和最优子结构的概念来解决离散形式的约束问题。
15. 离散元法是约束法求解方法的一种,主要用于求解离散情况下的优化问题,通过建立离散模型来求解最优解。