稳态误差的分析与计算
- 格式:pptx
- 大小:300.84 KB
- 文档页数:18
声明:本文档由山东电建(sddianjian)上传到豆丁网(),若有侵害您的权益,请发站内消息。
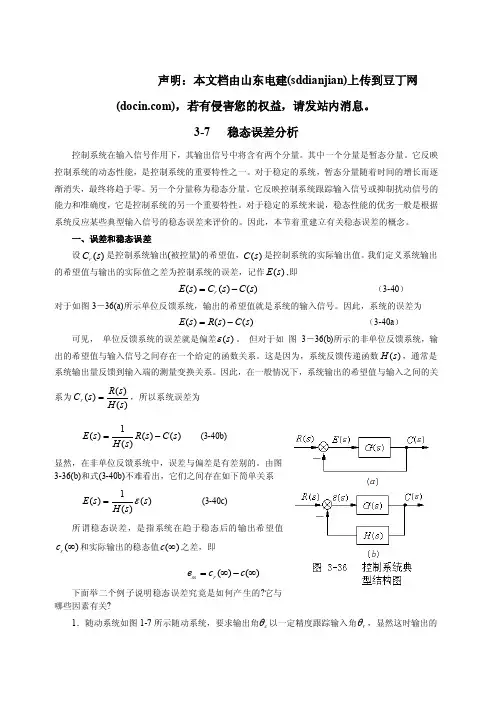
3-7 稳态误差分析控制系统在输入信号作用下,其输出信号中将含有两个分量。
其中一个分量是暂态分量。
它反映控制系统的动态性能,是控制系统的重要特性之一。
对于稳定的系统,暂态分量随着时间的增长而逐渐消失,最终将趋于零。
另一个分量称为稳态分量。
它反映控制系统跟踪输入信号或抑制扰动信号的能力和准确度,它是控制系统的另一个重要特性。
对于稳定的系统来说,稳态性能的优劣一般是根据系统反应某些典型输入信号的稳态误差来评价的。
因此,本节着重建立有关稳态误差的概念。
一、误差和稳态误差设)(s C r 是控制系统输出(被控量)的希望值,)(s C 是控制系统的实际输出值。
我们定义系统输出的希望值与输出的实际值之差为控制系统的误差,记作)(s E ,即)()()(s C s C s E r -= (3-40)对于如图3-36(a)所示单位反馈系统,输出的希望值就是系统的输入信号。
因此,系统的误差为)()()(s C s R s E -= (3-40a )可见, 单位反馈系统的误差就是偏差)(s ε。
但对于如 图 3-36(b)所示的非单位反馈系统,输出的希望值与输入信号之间存在一个给定的函数关系。
这是因为,系统反馈传递函数)(s H ,通常是系统输出量反馈到输入端的测量变换关系。
因此,在一般情况下,系统输出的希望值与输入之间的关 系为)()()(s H s R s C r =,所以系统误差为 )()()(1)(s C s R s H s E -=(3-40b) 显然,在非单位反馈系统中,误差与偏差是有差别的。
由图3-36(b)和式(3-40b)不难看出,它们之间存在如下简单关系)()(1)(s s H s E ε= (3-40c) 所谓稳态误差,是指系统在趋于稳态后的输出希望值)(∞r c 和实际输出的稳态值)(∞c 之差,即)()(∞-∞=c c e r ss下面举二个例子说明稳态误差究竟是如何产生的?它与哪些因素有关?1.随动系统如图1-7所示随动系统,要求输出角c θ以一定精度跟踪输入角r θ,显然这时输出的希望值就是系统的输入角度。
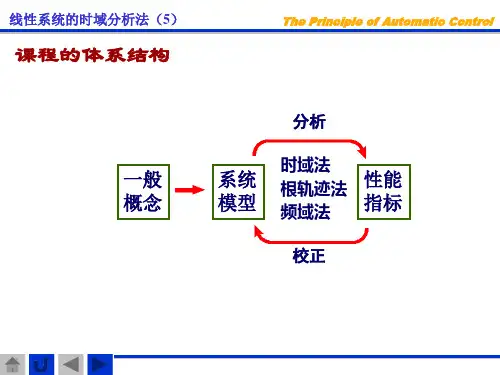
第三节 系统误差分析与计算对于一个控制系统来说,不但要求其是稳定的,而且还要求其动态特性要好。
但这还不够,因为系统在输入作用下的过渡过程和稳态过程组成了时间响应的全部内容,因而研究系统的稳态过程也是相当重要的。
评定稳态过程的质量指标为稳态误差,是系统控制准确度的一种量度,是一项重要的性能指标。
控制系统设计的课题之一,就是如何使系统的稳态误差小于某个允许值。
一、误差与稳态误差1、误差误差——严格说就是被控对象的实际输出信号与理论输出信号之差。
工程上有两种误差定义。
①按输出端定义的误差含义:误差为系统希望输出量与系统实际输出量之差。
即: ()()()r e t c t c t =−或: ()()()r E s C s C s =−一般来说,这种误差信号直观实用,但是常无法进行测量,具有明显的数学意义,工程实际中相对前一种误差较少使用。
②按输入端定义的误差。
()()()()()()()()()()()()()()()()()()()()()11111E s R s B s R s H s C s R s H s s R s R s H s s G s H s R s G s H s R s G s H s =−=−=−Φ⎡⎤=−Φ⎣⎦⎡⎤=−⋅⋅⎢⎥+⎣⎦=⋅+有时也将()()()11e s G s H s Φ=+称为误差传递函数。
或者,误差表示为时间的函数:()()()e t r t b t =−这种形式的误差可以进行测量,具有一定的物理意义。
2、稳态误差在时域中误差是时间t 的函数()e t 。
一个稳定的闭环控制系统,在外加输入作用下,经过一段时间,其瞬态响应分量衰减到可以忽略的程度,其输出信号()c t 趋于稳态分量,同样其误差信号()ss c t ()e t 也将趋于一个稳态的。
()ss e t 稳态误差——当时间当t 时,→∞()e t 的稳态分量称为稳态误差,既稳定系统误差的终值。
记为()ss e t ()。
稳态误差的总结分析和例解控制系统稳态误差是系统控制准确度的一种度量,通常称为稳态性能。
只有当系统稳定时,研究稳态误差才有意义,对不能稳定的系统,根本不存在研究稳态误差的可能性。
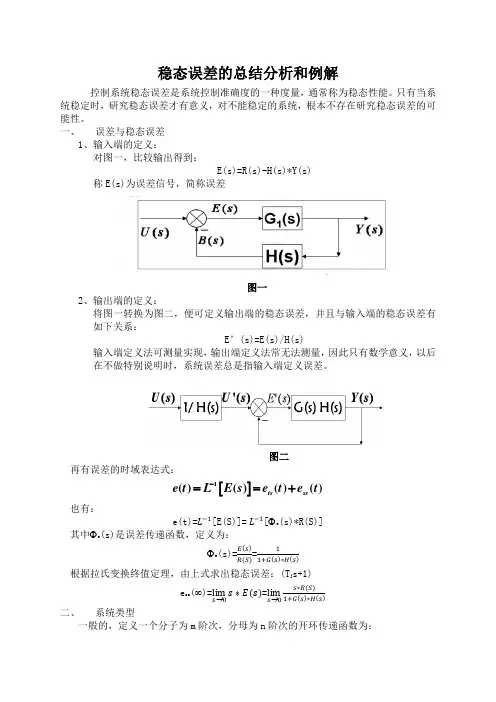
一、 误差与稳态误差1、输入端的定义:对图一,比较输出得到:E(s)=R(s)-H(s)*Y(s)称E(s)为误差信号,简称误差图一2、输出端的定义:将图一转换为图二,便可定义输出端的稳态误差,并且与输入端的稳态误差有如下关系:E ’(s)=E(s)/H(s)输入端定义法可测量实现,输出端定义法常无法测量,因此只有数学意义,以后在不做特别说明时,系统误差总是指输入端定义误差。
图二再有误差的时域表达式:也有:e(t)= [E(S)]= [Φe (s)*R(S)]其中Φe (s)是误差传递函数,定义为:Φe (s)==根据拉氏变换终值定理,由上式求出稳态误差:(T j s+1)e ss (∞)= =二、 系统类型一般的,定义一个分子为m 阶次,分母为n 阶次的开环传递函数为:[]1()()()()ts ss e t L E s e t e t -==+G(S)H(S)=K为开环增益,ν表示系统类型数,ν=0,表示0型系统;ν=1表示Ⅰ型系统;当ν大于等于2时,除了符合系统外,想使得系统稳定相当困难。
四、阶跃输入下的ess(∞)与静态位置误差系数Kpr(t)=R*1(t),则有:ess (∞)=νν用Kp表示静态位置误差系数:ess(∞)==其中: Kp=且有一般式子:Kp=ν∞ν五、斜坡输入下的ess(∞)与静态速度误差系数Kvr(t)=Rt,则有:ess (∞)=ν用Kv表示静态速度误差系数:ess(∞)==其中: Kv=六、加速度输入下的ess(∞)与静态加速度误差系数Kar(t)=Rt2/2,则有: ess (∞)=ν、用Kv表示静态速度误差系数: ess(∞)==其中: Kv=且有: Ka=、七、扰动状况下的稳态误差系统的模型如图三所示对扰动状况下的稳态误差仍然有输入端与输出端的两种定义:图三1、输入端定义法:扰动状况下的系统的稳态误差传递函数:由拉氏变换终值定理,求得扰动状况下的稳态误差为:2、输出端定义法:212()'()0()()1()()()G s E s Y s N s G s G s H s =-=-+记Φe (s) =为误差传递函数,其中G(s)为:G(s)=G 1(s)*G 2(s)*H(s)八、减小或者消除稳态误差的措施: (1)保证系统中各个环节(或元件),特别是反馈回路中元件的参数具有一定的精度和恒定性;(2)对输入信号而言,增大开环放大系数(开环增益),以提高系统对给定输入的跟踪能力;(3)对干扰信号而言,增大输入和干扰作用点之间环节的放大系数(扰动点之前的前向通道增益),有利于减小稳态误差;(4)增加系统前向通道中积分环节数目,使系统型号提高,可以消除不同输入信号时的稳态误差。
稳态误差公式稳态误差公式是控制系统中常用的一个概念,用于评估系统输出与期望输出之间的偏差。
在控制系统设计和分析中,稳态误差公式被广泛应用,能够帮助工程师评估系统的性能和稳定性。
稳态误差公式的含义稳态误差公式指的是控制系统在稳态下输出与期望输出之间的偏差。
稳态是指系统已经达到恒定状态,即输入信号已经稳定,系统没有改变时的状态。
稳态误差是输出与期望输出之间的差值,通常用e表示。
稳态误差公式可以用以下公式表示:e(t) = y(t) - r(t)其中e(t)表示在时间t时刻的稳态误差,y(t)表示系统输出在时间t时的值,r(t)表示期望输出在时间t时的值。
稳态误差公式的应用稳态误差公式在控制系统中具有广泛的应用,通常被用于以下几个方面:1. 系统性能分析稳态误差公式可以用于分析系统的性能,帮助工程师评估系统输出与期望输出之间的差距。
通过分析稳态误差,可以明确系统的性能限制,从而确定是否需要改进系统的设计。
2. 系统稳定性分析稳态误差公式也可以用于系统稳定性分析。
稳态误差越小,系统的稳定性越好。
因此,通过分析稳态误差的大小可以评估系统的稳定性。
3. 控制系统设计在控制系统设计中,稳态误差公式是一个非常重要的工具。
通过控制系统的参数设置,可以调整系统的稳态误差。
因此,稳态误差公式可以帮助工程师设计出性能更好、稳定性更高的控制系统。
稳态误差公式的限制稳态误差公式虽然在控制系统中具有广泛的应用,但也存在一些限制。
其中最重要的一个限制是,稳态误差公式只适用于稳态下的系统。
如果系统还没有进入稳态,稳态误差公式将无法提供准确的结果。
此外,稳态误差公式还有一个限制,那就是它不能完全反映系统的动态响应。
稳态误差公式只考虑了系统输出与期望输出之间的偏差,而没有考虑系统响应的速度、振荡等因素。
因此,在分析系统性能时,需要同时考虑系统的稳态误差和动态响应。
稳态误差公式的应用示例为了更好地理解稳态误差公式的应用,下面以比例控制系统为例进行说明。
自动控制原理稳态误差稳态误差是自动控制系统中一个非常重要的概念,它直接关系到系统的稳定性和准确性。
在控制系统中,我们经常会遇到一些误差,这些误差可能会影响系统的性能和稳定性。
因此,了解稳态误差的概念和计算方法对于控制系统的设计和分析都非常重要。
首先,我们来看一下稳态误差的定义。
稳态误差是指系统在稳定工作状态下,输出信号与期望值之间的差异。
换句话说,当输入信号保持不变时,系统输出与期望输出之间的偏差就是稳态误差。
稳态误差通常用于衡量系统的准确性和稳定性,它是评价控制系统性能的重要指标之一。
接下来,我们来看一下稳态误差的分类。
在自动控制系统中,稳态误差可以分为四种类型,静态误差、动态误差、稳态误差和瞬态误差。
静态误差是指系统在稳定工作状态下,输出信号与期望值之间的偏差;动态误差是指系统在工作过程中,输出信号与期望值之间的波动;稳态误差是指系统在长时间工作后,输出信号与期望值之间的偏差;瞬态误差是指系统在瞬时工作过程中,输出信号与期望值之间的偏差。
这四种误差类型各有特点,对于控制系统的设计和分析都有着重要的意义。
然后,我们来看一下稳态误差的计算方法。
在实际工程中,我们通常会用一些指标来衡量系统的稳态误差,比如静态误差增益、动态误差增益、稳态误差增益和瞬态误差增益等。
这些增益值可以帮助我们更好地了解系统的稳定性和准确性,从而指导控制系统的设计和分析工作。
最后,我们来看一下如何通过调节控制系统的参数来减小稳态误差。
在实际工程中,我们通常会通过调节控制系统的参数来改善系统的稳定性和准确性。
比如,可以通过增加控制器增益、改变控制器结构、优化控制器参数等方法来减小系统的稳态误差。
通过这些方法,我们可以更好地提高控制系统的性能和稳定性,从而更好地满足工程实际应用的需求。
总之,稳态误差是自动控制系统中一个非常重要的概念,它直接关系到系统的稳定性和准确性。
了解稳态误差的概念和计算方法对于控制系统的设计和分析都非常重要。
自动控制原理稳态误差相关的基本原理引言自动控制原理是研究如何通过对被控对象进行测量和调节,使其输出达到期望值的一门学科。
在实际应用中,我们往往希望被控对象能够快速、准确地达到期望值,并且能够稳定在该期望值附近。
然而,由于各种因素的影响,被控对象在实际操作中往往会存在一定的误差。
稳态误差就是描述系统输出与期望值之间的偏差。
稳态误差的定义稳态误差是指系统在长时间运行后,输出与期望值之间的持续偏差。
通常使用误差函数来描述稳态误差,常见的有积分误差、百分比偏差等。
稳态误差分类根据系统输入信号和输出响应之间的关系,稳态误差可以分为以下几种类型:阶跃输入信号下的稳态误差当输入信号为阶跃函数时,系统响应过程中存在一个阶段性变化。
根据输出与期望值之间的偏差大小和持续时间的不同,可以将阶跃输入信号下的稳态误差分为零稳态误差、常数稳态误差和无限稳态误差三种情况。
零稳态误差当系统输出在长时间运行后与期望值完全一致时,称系统具有零稳态误差。
这意味着系统能够快速、准确地响应输入信号,并最终达到期望值。
常数稳态误差当系统输出在长时间运行后与期望值存在一个固定的偏差时,称系统具有常数稳态误差。
虽然系统能够达到期望值附近,但始终存在一个固定的偏差。
无限稳态误差当系统输出在长时间运行后与期望值之间的偏差持续增大,并且无法消除时,称系统具有无限稳态误差。
这种情况下,系统无法达到期望值。
正弦输入信号下的稳态误差当输入信号为正弦函数时,系统响应过程中存在周期性变化。
对于正弦输入信号下的稳态误差,我们通常关注其幅频特性和相频特性。
幅频特性描述了输出信号的幅值与输入信号频率之间的关系。
对于稳定系统,幅频特性通常是一个函数,它可以用来衡量系统对不同频率的正弦输入信号的响应能力。
当幅频特性在某个频率处衰减到0时,称该频率为系统的截止频率。
相频特性相频特性描述了输出信号与输入信号相位之间的关系。
对于稳定系统,相频特性通常是一个函数,它可以用来衡量系统对不同相位的正弦输入信号的响应能力。
MATLAB稳态误差引言稳态误差是控制系统中的一个重要概念,它描述了系统在稳定状态下输出与期望输出之间的差异。
在MATLAB中,我们可以使用各种方法来分析和计算系统的稳态误差。
本文将介绍MATLAB中稳态误差的概念、计算方法以及如何使用MATLAB进行稳态误差分析。
稳态误差的概念稳态误差是指系统在稳定状态下输出与期望输出之间的差异。
在控制系统中,我们希望系统的输出能够尽可能地接近期望输出。
稳态误差可以帮助我们评估系统的性能,并用于系统设计和优化。
通常情况下,稳态误差可以分为以下几种类型: 1. 零稳态误差:当系统输出在稳定状态下与期望输出完全一致时,称为零稳态误差。
这意味着系统能够达到我们期望的输出,是理想的情况。
2. 常数稳态误差:当系统输出在稳定状态下与期望输出之间存在一个常数差异时,称为常数稳态误差。
这种情况下系统无法完全达到期望输出,但差异是固定的。
3. 无穷稳态误差:当系统输出在稳定状态下与期望输出之间存在无穷大的差异时,称为无穷稳态误差。
这意味着系统无法达到期望输出。
稳态误差的计算方法MATLAB提供了多种方法来计算系统的稳态误差。
以下是常用的几种计算方法:1. 开环传递函数法对于开环传递函数G(s),我们可以使用MATLAB中的step函数来计算系统的稳态误差。
step函数可以模拟系统的单位阶跃响应,并返回系统在稳定状态下的输出值。
通过比较输出值与期望输出,我们可以计算出稳态误差。
G = tf([1],[1 1]); % 开环传递函数t = 0:0.01:10; % 时间范围u = ones(size(t)); % 单位阶跃输入[y,t] = step(G,t); % 系统的单位阶跃响应e = u - y; % 稳态误差2. 闭环传递函数法对于闭环传递函数G(s),我们可以使用MATLAB中的step函数来计算系统的稳态误差。
与开环传递函数法类似,我们通过比较输出值与期望输出来计算稳态误差。