09 3-6 系统稳定性分析3-7 稳态误差分析(1)
- 格式:ppt
- 大小:1.82 MB
- 文档页数:2
系统稳定性分析实验报告系统稳定性分析实验报告一、引言系统稳定性是评估一个系统的重要指标,它关乎系统的可靠性、可用性和安全性。
本实验旨在通过对一个实际系统的稳定性分析,探讨系统在不同条件下的表现,并提出相应的改进措施。
二、实验背景本次实验选择了一个电力系统作为研究对象,该系统包括发电机、输电线路和用电设备。
电力系统的稳定性对于电力供应的连续性和质量至关重要,因此对其进行分析和改进具有重要意义。
三、实验方法1. 数据采集通过安装传感器和数据记录仪,我们获得了电力系统在不同工况下的运行数据,包括电压、电流、频率等参数。
2. 稳定性评估基于采集到的数据,我们使用统计学方法对电力系统的稳定性进行评估。
通过计算各个参数的均值、方差和波动性等指标,我们可以了解系统在不同时间段内的稳定性表现。
3. 系统优化根据稳定性评估的结果,我们将提出相应的系统优化措施。
例如,如果发现电压波动过大,我们可以考虑增加稳压器或改进输电线路的设计。
四、实验结果通过对电力系统的稳定性分析,我们得到了以下几个重要结果:1. 在高负荷情况下,电压波动明显增加,超出了正常范围。
这可能是由于输电线路的容量不足导致的。
因此,我们建议增加输电线路的容量,以提高系统的稳定性。
2. 在夏季高温天气下,电力系统的频率波动较大,可能会对用电设备的正常运行产生影响。
为了解决这个问题,我们建议在高温天气下增加发电机的容量,以提供足够的电力供应。
3. 在实验过程中,我们还发现了一些潜在的安全隐患,例如输电线路的老化和设备的过载。
这些问题可能会导致系统的不稳定和故障。
因此,我们建议进行定期的设备检修和维护,以确保系统的可靠性和安全性。
五、结论通过本次实验,我们对电力系统的稳定性进行了全面的分析,并提出了相应的改进措施。
实验结果表明,系统的稳定性对于电力供应的连续性和质量至关重要。
通过对系统进行优化和维护,我们可以提高系统的稳定性,确保电力供应的可靠性和安全性。

实验五自动控制系统的稳定性和稳态误差分析一、实验目的1、研究高阶系统的稳定性,验证稳定判据的正确性;2、了解系统增益变化对系统稳定性的影响;3、观察系统结构和稳态误差之间的关系。
二、实验任务1、稳定性分析欲判断系统的稳定性, 只要求出系统的闭环极点即可, 而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用 MATLAB 中的 tf2zp 函数求出系统的零极点,或者利用 root 函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。
(1 已知单位负反馈控制系统的开环传递函数为 0.2(2.5 ( (0.5(0.7(3s G s s s s s +=+++, 用 MATLAB 编写程序来判断闭环系统的稳定性, 并绘制闭环系统的零极点图。
在 MATLAB 命令窗口写入程序代码如下:z=-2.5p=[0,-0.5,-0.7,-3]k=0.2Go=zpk(z,p,kGc=feedback(Go,1Gctf=tf(Gcdc=Gctf.dendens=poly2str(dc{1},'s'运行结果如下:dens=s^4 + 4.2 s^3 + 3.95 s^2 + 1.25 s + 0.5dens 是系统的特征多项式,接着输入如下 MATLAB 程序代码:den=[1,4.2,3.95,1.25,0.5]p=roots(den运行结果如下:p =-3.0058-1.0000-0.0971 + 0.3961i-0.0971 - 0.3961ip 为特征多项式 dens 的根,即为系统的闭环极点,所有闭环极点都是负的实部, 因此闭环系统是稳定的。
下面绘制系统的零极点图, MATLAB 程序代码如下:z=-2.5p=[0,-0.5,-0.7,-3]k=0.2Go=zpk(z,p,kGc=feedback(Go,1Gctf=tf(Gc[z,p,k]=zpkdata(Gctf,'v'pzmap(Gctfgrid运行结果如下:z =-2.5000p =-3.0058-1.0000-0.0971 + 0.3961i-0.0971 - 0.3961ik =0.2000输出零极点分布图如图 3-1所示。

控制系统的稳定性分析与评估控制系统是现代工程中的重要组成部分,其稳定性对于系统的正常运行至关重要。
在控制系统设计和维护中,稳定性的分析与评估是必不可少的步骤。
本文将介绍控制系统稳定性分析的方法和评估的指标,并探讨其在工程实践中的应用。
一、稳定性分析方法稳定性分析是控制系统设计的基础,常用的稳定性分析方法有时域法、频域法和根轨迹法。
时域法是基于控制系统的时间响应进行分析。
通过计算系统的单位阶跃响应或脉冲响应,可以获取系统的稳定情况。
时域法能够提供系统的稳定性指标,如超调量、峰值时间和稳态误差等。
频域法是基于控制系统在频域上的特性进行分析。
通过对系统的频率响应进行采样和分析,可以得到幅频特性和相频特性。
频域法能够提供系统的增益裕度和相位裕度等指标,可以帮助判断系统的稳定性。
根轨迹法是基于控制系统传递函数的极点和零点分布进行分析。
通过绘制系统的根轨迹图,可以直观地观察系统的稳定性和响应特性。
根轨迹法可以帮助系统设计者调整参数,以达到所需的稳定性要求。
这些稳定性分析方法可以相互结合使用,以提供更全面、准确的稳定性评估结果。
二、稳定性评估指标稳定性评估是根据稳定性分析的结果,对控制系统的稳定性程度进行评估的过程。
常用的稳定性评估指标有阻尼比、杆塞尔稳定判据和奈奎斯特稳定判据等。
阻尼比是评估系统阻尼效果的指标,用于描述系统的衰减程度。
阻尼比为1时系统为临界稳定,大于1则系统为超阻尼,小于1则系统为欠阻尼。
杆塞尔稳定判据是基于系统极点的位置判断系统的稳定性。
系统所有极点的实部均小于零时,系统是稳定的。
杆塞尔稳定判据适用于分析线性时不变系统的稳定性。
奈奎斯特稳定判据是使用频域法进行稳定性评估时的重要指标。
奈奎斯特稳定判据通过绘制控制系统的奈奎斯特曲线,判断系统的稳定性。
奈奎斯特稳定判据可应用于分析非线性、时变以及传感器和执行器等带非线性特性的控制系统。
三、工程应用稳定性分析与评估在工程实践中具有重要的应用价值。
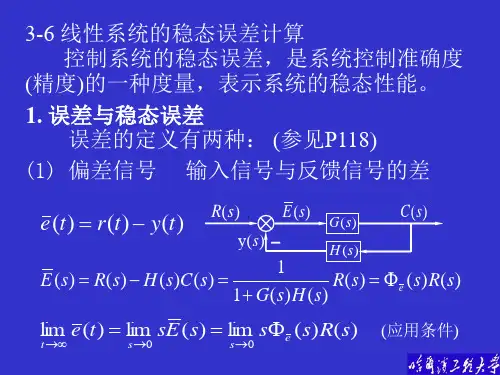
3-6 系统稳定性分析控制系统在实际工作中,总会受到外界和内部一些因素的扰动,例如负载或能源的波动、系统参数的变化等等,使系统偏离原来的平衡工作状态。
如果在扰动消失后,系统不能恢复到原来的平衡工作状态(即系统不稳定),则系统是无法工作的。
稳定是控制系统正常工作的首要条件,也是控制系统的重要性能。
因此,分析系统的稳定性,并提出确保系统稳定的条件是自动控制理论的基本任务之一。
一、稳定性定义及系统稳定的充要条件如果系统受到扰动,偏离了原来的平衡状态,当扰动消失后,系统能够以足够的准确度恢复到原来的平衡状态,则系统是稳定的。
否则,系统是不稳定的。
可见,稳定性是系统在去掉扰动以后,自身具有的一种恢复能力,所以是系统的一种固有特性。
这种特性只取决于系统的结构、参数而与初始条件及外作用无关。
由上所述,稳定性所研究的问题是当扰动消失后系统的运动情况,显然可以用系统的脉冲响应函数来描述。
如果脉冲响应函数是收敛的,即0)(lim =∞→t k t系统是稳定的。
由于单位脉冲函数的拉氏变换等于1,所以系统的脉冲响应函数就是系统闭环传递函数的拉氏反变换。
设系统闭环传递函数为)())(()())(()()()(2121n n m m s s s a z s z s z s b s D s M s λλλ------==Φ 式中1z ,2z ,…,m z 为闭环零点;1λ,2λ,…,n λ为闭环极点。
脉冲响应函数的拉氏变换式,即为)()()()()()(11n n m m s s a z s z s b s s C λλ----=Φ= (3-38)如果闭环极点为互不相同的实数根,那么把方程(3-38)展开成部分分式∑=-=-++-+-=ni ii n n s A s A s A s A s C 12211)(λλλλ式中i A 为待定常数。
对上式进行拉氏反变换,即得单位脉冲响应函数)(t kt ni i i e A t k λ∑==1)(根据稳定性定义0lim )(lim 1==∑=∞→∞→ni t i t t i e A t k λ考虑到系数i A 的任意性,必须使上式中的每一项都趋于零,所以应有0lim =∞→t i t i e A λ (3-39)其中i A 为常值,式(3-39)表明,系统的稳定性仅取决于特征根i λ的性质。
2^-1T rjn?fer FenT rjn?fer FenMux ScopeScope实验三系统的稳态误差分析一.实验目的:1.了解系统开环增益和系统型别对稳态误差的影响。
2.了解输入信号的形式和幅值对系统稳态误差的影响。
3.分析扰动作用下对系统稳态误差的影响。
4.研究减小或消除稳态误差的措施。
二.实验内容:1 •分别观测输入信号为阶跃信号、斜坡信号、加速度信号时,不同系统型别稳态误差的变化情况。
2.对有差系统,增大或减小系统的开环增益,观察系统稳态误差的变化。
3•改变输入信号的幅值,观察系统稳态误差的变化。
4.观测有扰动作用时,系统稳态误差的变化。
5.采取一种措施消除阶跃扰动对系统的影响。
二实验原理:阶跃输入信号作用于0型系统,如图(3-1 )所示:图(3-1 )Step斜坡输入信号作用于I型系统,如图(3-2 )所示:图(3-2)加速度输入信号作用于U 型系统,如图(3-3)所示:图(3-3) 图(3-4)四.实验步骤:利用MATLAB 中的Simulink 仿真软件。
1. 参照实验一的步骤,建立如图(3-1)所示的实验方块图进行仿真;2. 单击工具栏中的 卜图标,开始仿真,观测在阶跃输入信号作用下,0 型系统的输出曲线和误差曲线,记录此时的稳态误差值,并与理论计算值 相比较;3. 有误差时,调整“ Gain ”模块的增益,观察稳态误差的变化,分析系统开 环增益对稳态性能的影响;4. 有误差时,调整输入信号的幅值,观察稳态误差的变化,分析输入信号的 大小对稳态误差的影响;5•将对象分别更换为I 型和U 型系统,观察在阶跃输入信号作用下,I型和U 型系统的输出曲线和误差曲线,记录此时的稳态误差值。
6. 更换输入信号的形式为斜坡信号,参考图(3-2)所示的实验方块图,重复步 骤2~4,分别观测0型、I 型和U 型系统的稳态误差。
扰动信号作用下的系统,如图(3-4)所示:7.再将输入信号的形式更换为加速度信号,参考图(3-3)所示的实验方块图,重复步骤2~4,分别观测0型、I型和U型系统的稳态误差。