控制系统状态空间设计
- 格式:ppt
- 大小:1.43 MB
- 文档页数:8
控制系统状态空间法控制系统状态空间法是现代控制理论中常用的一种方法,它描述了控制系统的动态行为,并通过状态变量来表示系统的内部状态。
在这篇文章中,我们将详细介绍控制系统状态空间法的基本概念、理论原理以及应用。
一、控制系统状态空间法的基本概念状态空间法是一种描述动态系统的方法,通过一组一阶微分方程来表示系统的动态行为。
在这个方法中,我们将控制系统看作是一个黑盒子,输入和输出之间的关系可以用状态方程和输出方程来描述。
1. 状态方程状态方程描述了系统的内部状态随时间的演化规律。
它是一个一阶微分方程组,通常用向量形式表示:ẋ(t) = Ax(t) + Bu(t)其中,x(t)表示系统的状态向量,A是状态转移矩阵,B是输入矩阵,u(t)是输入向量。
2. 输出方程输出方程描述了系统的输出与内部状态之间的关系。
它通常用线性方程表示:y(t) = Cx(t) + Du(t)其中,y(t)表示系统的输出向量,C是输出矩阵,D是直接传递矩阵。
3. 状态空间表示将状态方程和输出方程合并,可以得到系统的状态空间表示:ẋ(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)在状态空间表示中,状态向量x(t)包含了系统的所有内部状态信息,它决定了系统的行为和性能。
二、控制系统状态空间法的理论原理控制系统状态空间法基于线性时不变系统理论,通过分析系统的状态方程和输出方程,可以得到系统的稳定性、可控性和可观测性等性质。
1. 系统稳定性系统稳定性是判断系统是否能够在有限时间内达到稳定状态的重要指标。
对于线性时不变系统,当且仅当系统的所有状态变量都是稳定的,系统才是稳定的。
通过分析状态方程的特征值,可以判断系统的稳定性。
2. 系统可控性系统可控性表示是否可以通过选择合适的输入来控制系统的状态。
一个系统是可控的,当且仅当存在一组输入矩阵B的列向量线性组合可以使得系统的状态从任意初始条件变为目标状态。
通过分析状态转移矩阵的秩,可以判断系统的可控性。
状态空间设计pid控制器原理PID控制器是一种常见的控制系统,用于调节系统的输出以使其接近预期的参考输入。
PID代表比例(Proportional)、积分(Integral)和微分(Derivative),这三个部分组合起来形成了PID控制器。
首先,让我们来看看状态空间设计。
状态空间模型是用一组一阶微分方程描述动态系统的数学模型。
在状态空间设计中,系统的动态行为被表示为状态变量的一组一阶微分方程。
这些状态变量通常是系统的最小集合,可以完全描述系统的动态行为。
状态空间模型可以方便地用于多变量系统和非线性系统的分析与设计。
现在,让我们来谈谈PID控制器的原理。
PID控制器的基本原理是通过比例、积分和微分三个部分来调节系统的输出。
比例部分产生一个控制量,与系统的误差成比例。
积分部分对系统历史上的误差进行累积,并产生一个控制量。
微分部分预测系统未来的误差变化率,并产生一个控制量。
这三个部分的输出通过加权求和得到最终的控制量,用于调节系统的输出。
在状态空间设计中,可以将PID控制器与系统的状态空间模型相结合,从而实现对系统的控制。
通过将PID控制器的输出作为系统的输入,可以设计状态空间反馈控制器,从而实现对系统状态的稳定和跟踪。
总的来说,PID控制器的原理是基于比例、积分和微分三个部分来调节系统的输出,而状态空间设计则是一种描述动态系统的数学模型。
将PID控制器与状态空间模型相结合,可以实现对系统的控制和稳定。
这种方法在工业控制和自动化领域得到了广泛的应用。
希望这个回答能够帮助你理解PID控制器原理和状态空间设计的相关概念。
控制系统的状态空间分析与设计控制系统的状态空间分析与设计是现代控制理论的重要内容之一,它提供了一种描述和分析控制系统动态行为的数学模型。
状态空间方法是一种广泛应用于系统建模和控制设计的理论工具,其基本思想是通过描述系统内部状态的变化来揭示系统的特性。
一、状态空间模型的基本概念状态空间模型描述了系统在不同时间点的状态,包括系统的状态变量和输入输出关系。
在控制系统中,状态变量是指影响系统行为的内部变量,如电压、速度、位置等。
通过状态空间模型,可以将系统行为转化为线性代数方程组,从而进行分析和设计。
1. 状态方程控制系统的状态方程是描述系统状态演化的数学表达式。
一般形式的状态方程可以表示为:x(t) = Ax(t-1) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统在时刻t的状态向量,A是系统的状态转移矩阵,B是控制输入矩阵,u(t)是系统的控制输入,y(t)是系统的输出,C是输出矩阵,D是直接传递矩阵。
2. 状态空间矩阵状态空间矩阵包括系统的状态转移矩阵A、控制输入矩阵B、输出矩阵C和直接传递矩阵D。
通过这些矩阵,可以准确描述系统的状态变化与输入输出之间的关系。
3. 系统的可控性和可观性在状态空间分析中,可控性和可观性是评估系统控制性能和观测性能的重要指标。
可控性是指通过调节控制输入u(t),系统的状态可以在有限时间内从任意初始状态x(0)到达任意预期状态x(t)。
可控性可以通过系统的状态转移矩阵A和控制输入矩阵B来判定。
可观性是指通过系统的输出y(t)可以完全确定系统的状态。
可观性可以通过系统的状态转移矩阵A和输出矩阵C来判定。
二、状态空间分析方法状态空间分析方法包括了系统响应分析、系统稳定性分析和系统性能指标分析。
1. 系统响应分析系统的响应分析可以通过状态方程进行。
主要分析包括零输入响应和零状态响应。
零输入响应是指当控制输入u(t)为零时,系统的输出y(t)变化情况。
Chapter1控制系统的状态空间模型1.1 状态空间模型在经典控制理论中,采用n 阶微分方程作为对控制系统输入量)(t u 和输出量)(t y 之间的时域描述,或者在零初始条件下,对n 阶微分方程进行Laplace 变换,得到传递函数作为对控制系统的频域描述,“传递函数”建立了系统输入量)]([)(t u L s U =和输出量)]([)(t y L s Y =之间的关系。
传递函数只能描述系统的外部特性,不能完全反映系统内部的动态特征,并且由于只考虑零初始条件,难以反映系统非零初始条件对系统的影响。
现代控制理论是建立在“状态空间”基础上的控制系统分析和设计理论,它用“状态变量”来刻画系统的内部特征,用“一阶微分方程组”来描述系统的动态特性。
系统的状态空间模型描述了系统输入、输出与内部状态之间的关系,揭示了系统内部状态的运动规律,反映了控制系统动态特性的全部信息。
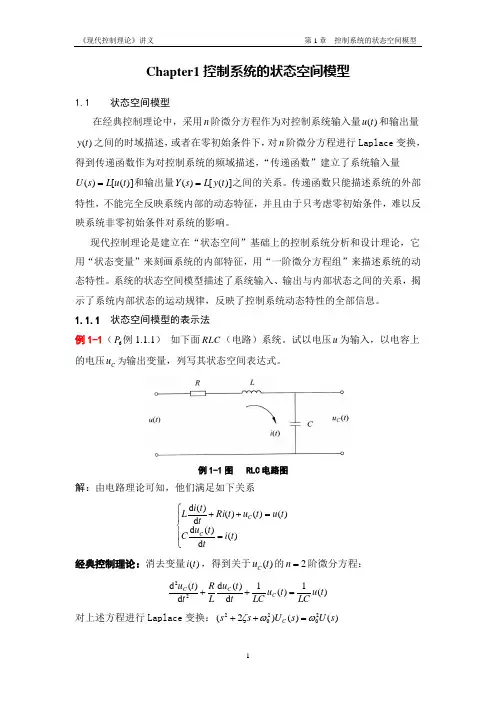
1.1.1 状态空间模型的表示法例1-1(6P 例1.1.1) 如下面RLC (电路)系统。
试以电压u 为输入,以电容上的电压C u 为输出变量,列写其状态空间表达式。
例1-1图 RLC 电路图解:由电路理论可知,他们满足如下关系⎪⎩⎪⎨⎧==++)(d )(d )()()(d )(d t i t t u C t u t u t Ri t t i L C C 经典控制理论:消去变量)(t i ,得到关于)(t u C 的2=n 阶微分方程:)(1)(1d )(d d )(d 22t u LCt u LC t t u L R t t u C C C =++ 对上述方程进行Laplace 变换:)()()2(20202s U s U s s C ωωζ=++得到传递函数:202202)(ωζω++=s s s G ,LC10=ω,L R 2=ζ 现代控制理论:选择⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛)()(21t u t i x x C 流过电容的电流)(t i 和电容上的电压)(t u C 作为2个状态变量,2=n (2个储能元件);1个输入为)(t u ,1=m ;1个输出C u y =,1=r 。
状态空间分析与控制系统设计状态空间分析和控制系统设计是现代控制理论中重要的基础概念和方法。
通过对系统的状态和状态方程进行建模和分析,可以实现对系统行为的全面理解和控制。
本文将介绍状态空间分析和控制系统设计的基本原理,并分析其在实际应用中的重要性和价值。
一、状态空间分析状态空间分析是一种将系统的动态行为表示为一组线性常微分方程或差分方程的方法。
在状态空间模型中,系统的行为被描述为一系列状态变量的演化过程,而不是传统的输入-输出模型。
通过状态空间模型,我们可以更加全面地了解系统的内部结构和动态性能。
在状态空间分析中,系统的行为由一组一阶微分方程或差分方程表示:x(t+1) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统的状态向量,表示系统的内部状态,u(t)是输入控制向量,y(t)是输出向量,A、B、C和D是系统的系数矩阵。
通过对状态空间方程进行求解和分析,可以得到系统的模态特性、状态转移矩阵、特征值和特征向量等重要信息。
这些信息能够帮助我们了解系统的稳定性、可控性和可观测性等特性,从而为系统的控制设计提供重要依据。
二、控制系统设计基于状态空间分析的控制系统设计是将系统的状态空间模型与控制算法相结合,实现对系统动态行为的控制和调节。
通过对状态空间方程的设计和调整,可以实现对系统的稳定性、响应速度、精度和鲁棒性等方面的要求。
常用的状态空间控制方法包括状态反馈控制、输出反馈控制和观测器设计等。
状态反馈控制是通过测量系统状态并构造一个状态反馈控制器来实现对系统的控制。
输出反馈控制是通过测量系统输出并构造一个输出反馈控制器来实现控制目标。
观测器设计是通过测量系统输出并估计系统状态来实现对系统的控制。
在控制系统设计过程中,我们需要考虑系统的稳定性、响应时间、鲁棒性和控制精度等方面的要求。
通过合理选择控制算法和调节参数,可以使系统在各种工作条件下保持良好的动态性能和稳定性,提高系统的控制质量和效率。
控制系统状态空间设计控制系统状态空间设计是现代控制理论中的重要内容之一,它涉及到系统建模、状态变量的选择、状态空间方程的建立以及反馈控制等方面。
本文将详细介绍控制系统状态空间设计的方法和步骤。
引言控制系统是在各种工程领域中广泛应用的一种技术手段,它通过对系统输入和输出的监测和调节,实现对系统状态的控制。
状态空间法是描述和分析控制系统的一种有效工具,其基本思想是利用状态变量来描述系统的状态演化规律。
一、系统建模在进行状态空间设计之前,首先需要建立准确的系统模型。
系统建模可以通过物理定律、实验数据或数学方法等手段来实现。
1. 物理定律建模对于一些物理系统,可以通过物理定律来建立系统模型。
例如,对于机械系统可以利用牛顿第二定律、能量守恒定律等建立运动方程,对于电路系统可以利用欧姆定律、基尔霍夫定律等建立电路方程。
2. 实验数据建模通过对系统进行实验,获取系统的输入和输出数据,从而建立系统模型。
可以利用系统辨识技术,如最小二乘法、频域分析等进行数据处理和模型辨识。
3. 数学方法建模对于一些抽象的系统,可以通过数学方法进行建模。
常用的数学建模方法包括微分方程、差分方程和传递函数等。
状态空间法是利用微分方程或差分方程描述系统动态行为的一种方法。
二、状态变量的选择状态变量的选择对于系统的状态空间描述至关重要,它直接关系到系统模型的简洁性和有效性。
1. 最小状态变量选择最小状态变量是状态空间设计的一个重要原则。
通过选择足够少的状态变量来描述整个系统的状态,可以降低系统复杂性,简化控制器的设计。
2. 物理量和能量变量在选取状态变量的过程中,可以考虑选择与系统物理量或能量变量相关的状态变量。
这样选择的状态变量更直观、易于理解,有助于后续的控制器设计。
三、状态空间方程的建立状态空间方程是实现控制系统状态空间设计的核心内容,它是对系统动态行为的描述,包括系统的状态方程和输出方程。
1. 状态方程状态方程描述了系统状态变量随时间变化的规律。
控制系统状态空间应用引言:控制系统是现代工程中十分重要的一个领域,它涉及到工业自动化、电气工程、通信系统等多个方面。
其中,状态空间模型是一种广泛应用的数学工具,可用于描述和分析控制系统的动态行为。
本文将介绍控制系统的状态空间模型以及其在工程实际中的应用。
一、状态空间模型的基本原理状态空间模型是一种用于描述连续时间系统的数学模型,由状态方程和输出方程组成。
在状态空间模型中,系统的状态变量是描述系统动态行为的重要参数,而输入和输出变量则是表示系统输入和输出的信息。
1.1 状态方程状态方程描述了系统状态变量随时间变化的规律。
一般形式如下:dx/dt = Ax + Bu其中,dx/dt表示状态变量x随时间的变化率,A是状态矩阵,描述了状态变量之间的相互关系,B是控制矩阵,描述了输入变量对状态变量的影响。
1.2 输出方程输出方程描述了系统的输出变量与状态变量之间的关系。
一般形式如下:y = Cx + Du其中,y表示输出变量,C是输出矩阵,描述了状态变量与输出变量之间的关系,D是直接传递矩阵,表示输入变量对输出变量的直接影响。
二、控制系统状态空间模型的应用控制系统状态空间模型在工程实际中有着广泛的应用。
以下将分别介绍其在系统分析和控制设计中的具体应用。
2.1 系统分析状态空间模型可用于分析系统动态响应特性以及系统稳定性。
通过求解状态方程或者输出方程,可以获得系统的状态变量和输出变量的时间响应。
通过分析时间响应曲线,可以了解系统的超调量、响应速度等性能指标,从而对系统的动态特性有一个直观的认识。
2.2 控制设计状态空间模型在控制器的设计和参数调节中起到重要作用。
通过状态反馈控制策略,可以将系统状态变量作为反馈信号,根据系统状态的变化对控制器输出进行调节,以实现对系统的稳定控制。
此外,通过状态观测器的设计,可以根据系统输出变量推测出系统状态变量的估计值,从而实现对系统状态的可观测性。
三、控制系统状态空间模型的优势相比于传统的传输函数模型,控制系统的状态空间模型具有以下优势:3.1 描述能力强状态空间模型可以直观地描述系统的动态行为,包括状态变量和输出变量的时域特性。
状态空间设计pid控制器原理全文共四篇示例,供读者参考第一篇示例:状态空间设计PID控制器原理PID控制器是控制系统中常用的一种控制策略,它通过比例、积分和微分三种控制方式来实现对系统的控制。
在工业自动化等领域,PID 控制器通常被广泛应用,以实现对系统的精确控制。
在PID控制器设计中,状态空间方法为设计者提供了一种简洁而有效的设计框架,可以更好地理解和分析控制系统的性能。
一、PID控制器的基本原理PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成,其基本原理是通过计算控制误差的比例、积分和微分量,来调节系统输出,使系统的输入与期望输出尽可能接近。
具体而言,PID控制器的输出可以表示为:\[ u(t)=K_{p}e(t)+K_{i}\int_{0}^{t}e(\tau)d\tau+K_{d}\frac{de(t)}{dt} \]\[ e(t) \]表示系统的误差信号,\[ K_{p} \]、\[ K_{i} \]和\[ K_{d} \]分别表示比例、积分和微分的系数,\(u(t)\)表示PID控制器的输出。
比例部分的作用是根据当前系统误差的大小来调节输出信号,使系统能够快速响应并收敛到设定值。
积分部分则用于消除系统的静态误差,通过对误差信号的积分来实现系统的稳定性。
微分部分则可以消除系统的瞬时波动,提高系统的响应速度。
状态空间方法是一种描述线性时间不变系统的数学模型的方法,它可以将系统表示为状态方程和输出方程的组合形式。
在设计PID控制器时,状态空间方法可以将系统的状态向量、输入和输出表示为矩阵形式,从而更好地理解系统的结构和参数。
在状态空间设计PID控制器时,首先需要将系统的状态方程表示为如下形式:\[ \dot{x}(t)=Ax(t)+Bu(t) \]\[ x(t) \]表示系统的状态向量,\[ u(t) \]表示系统的输入信号,\[ y(t) \]表示系统的输出信号,\[ A \]、\[ B \]、\[ C \]和\[ D \]分别表示系统的状态矩阵、输入矩阵、输出矩阵和传递矩阵。
在MATLAB中使用状态空间模型进行设计MATLAB是一种功能强大的计算机工具,可以用于各种科学计算、数据可视化和算法开发等任务。
在控制系统设计中,MATLAB也是一个重要的工具,可以用来建立和分析控制系统模型。
其中,状态空间模型是一种常用的表示方法,可以描述系统的动态行为和状态变化。
状态空间模型是一种数学模型,用一组微分方程描述系统的动态行为。
它通过将系统内部的状态变量以及输入和输出变量进行关联,来描述系统的演化过程。
状态空间模型可以用矩阵形式表示,这种表示方法直观而且方便进行计算。
在MATLAB中,可以使用StateSpace类来构建状态空间模型。
StateSpace类可以接受系统的系数矩阵作为输入,然后根据这些系数矩阵构建一个状态空间模型对象。
这个对象可以用来进行模型分析、设计和模拟等操作。
下面我们将介绍一些常用的MATLAB函数和命令,帮助读者了解如何在MATLAB中使用状态空间模型进行设计。
首先,我们可以使用`ss`函数来创建一个状态空间模型对象。
这个函数可以接受系统的系数矩阵作为输入,然后返回一个StateSpace对象。
例如,我们可以使用如下命令创建一个二阶系统的状态空间模型:```matlabA = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);```在上述代码中,矩阵A、B、C和D分别表示系统的状态方程、输入矩阵、输出矩阵和直接传递矩阵。
通过使用`ss`函数,我们可以将这些矩阵传递给StateSpace对象,并得到一个表示系统的状态空间模型对象sys。
接下来,我们可以使用MATLAB提供的函数和方法来对状态空间模型进行各种操作。
例如,我们可以使用`tf`函数将状态空间模型转换为传输函数模型。
传输函数模型是一种常用的控制系统表示方法,可以用来分析系统的频率响应和稳定性等特性。
下面是一个将状态空间模型转换为传输函数模型的示例代码:```matlabtf_sys = tf(sys);```在上述代码中,我们使用`tf`函数将状态空间模型sys转换为传输函数模型tf_sys。