状态空间法
- 格式:ppt
- 大小:654.50 KB
- 文档页数:56
状态空间法例题【原创实用版】目录1.状态空间法的概念和基本原理2.状态空间法的应用3.状态空间法的例题解析正文1.状态空间法的概念和基本原理状态空间法是一种用于求解马尔科夫决策过程(MDP)最优策略的数学方法。
它将 MDP 问题转化为一个关于状态空间中所有可能状态的线性方程组,通过求解这个方程组,可以得到 MDP 问题的最优策略。
状态空间法的基本原理是基于贝尔曼最优方程,通过对每个状态的价值函数进行迭代计算,最终收敛到最优值函数,从而得到最优策略。
2.状态空间法的应用状态空间法广泛应用于强化学习、自动控制、人工智能等领域。
在实际问题中,当我们面临一个 MDP 问题时,可以通过状态空间法来求解最优策略,从而实现最优决策。
例如,在机器人导航问题中,状态空间法可以帮助我们找到最优路径,使得机器人能够迅速到达目标地点。
3.状态空间法的例题解析下面我们通过一个简单的例题来解析状态空间法的应用。
例题:一个机器人需要在一个网格世界中从起点走到终点,每个格子有两种可能的动作:向上或向右。
每个格子有一个奖励值,机器人的目标是选择动作,使得从起点到终点的累积奖励最大。
解:我们可以将这个问题转化为一个 MDP 问题,用状态空间法求解最优策略。
(1)定义状态空间:状态空间包括所有可能的状态,即机器人所在的格子。
(2)定义动作空间:动作空间包括所有可能的动作,即向上和向右。
(3)定义奖励函数:奖励函数是每个状态下采取某个动作后的奖励值。
(4)根据贝尔曼最优方程,我们可以得到状态空间法对应的线性方程组。
(5)求解线性方程组,得到每个状态下的最优价值函数。
(6)根据最优价值函数,我们可以得到每个状态下的最优策略。
通过以上步骤,我们可以得到从起点到终点的最优路径,以及相应的最大累积奖励。
总之,状态空间法是一种求解 MDP 最优策略的有效方法,它具有广泛的应用前景。


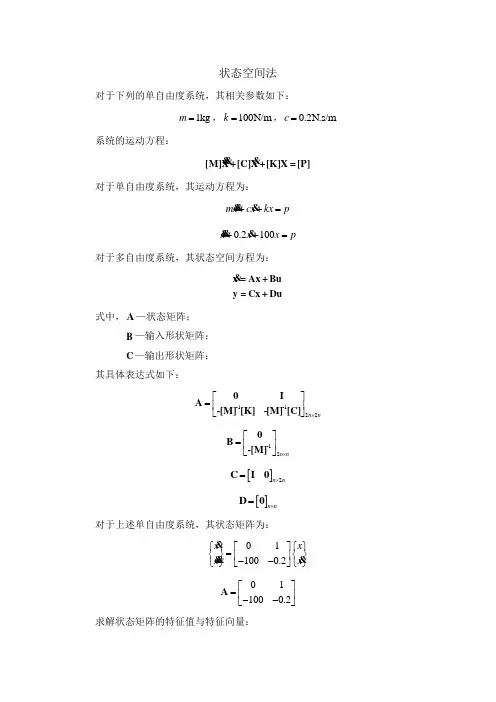
状态空间法对于下列的单自由度系统,其相关参数如下:1kg m =,100N/m k =,0.2N.s/m c =系统的运动方程:[M]X +[C]X +[K]X =[P]对于单自由度系统,其运动方程为:mx cx kx p ++=0.2100x x x p ++=对于多自由度系统,其状态空间方程为:x =Ax +Bu y =Cx +Du式中,A —状态矩阵;B —输入形状矩阵;C —输出形状矩阵;其具体表达式如下:-1-122-n n⨯⎡⎤=⎢⎥⎣⎦0I A -[M][K][M][C] -12n n⨯⎡⎤=⎢⎥⎣⎦0B -[M] []2n n ⨯=C I 0[]n n ⨯=D 0对于上述单自由度系统,其状态矩阵为:011000.2x x x x ⎧⎫⎡⎤⎧⎫=⎨⎬⎨⎬⎢⎥--⎩⎭⎣⎦⎩⎭011000.2⎡⎤=⎢⎥--⎣⎦A 求解状态矩阵的特征值与特征向量:0λ-=A I{}{}φλφ=A得到的特征值为:10.110j λ≈-+,20.110j λ≈--11{}0.110j φ⎡⎤=⎢⎥-+⎣⎦,21{}0.110j φ⎡⎤=⎢⎥--⎣⎦同时可以看出:{}{}(2)11(1)1=0.110j φλφ=-+,{}{}(2)22(1)2=0.110j φλφ=-- 取虚部为正的特征值求系统的特征参数。
系统的固有频率:110/n rad s ωλ===≈阻尼比:11Re()0.01λξλ-==≈根据其阵型图可以看出,其位于左半平面(即负半平面),因此系统是稳定的。
系统阻尼是正值,阻尼起到耗能效果;若阻尼为负值,将位于右半平面,系统将变得不稳定,此时阻尼起到吸收能量的作用。
人工智能第二章知识表示方法答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2利用图2.3,用状态空间法规划一个最短的旅行路程:此旅程从城市A开始,访问其他城市不多于一次,并返回A。
选择一个状态表示,表示出所求得的状态空间的节点及弧线,标出适当的代价,并指明图中从起始节点到目标节点的最佳路径。
710910D图2.32-3试用四元数列结构表示四圆盘梵塔问题,并画出求解该问题的与或图。
用四元数列(nA,nB,nC,nD)来表示状态,其中nA表示A盘落在第nA号柱子上,nB表示B盘落在第nB号柱子上,nC表示C盘落在第nC号柱子上,nD表示D盘落在第nD号柱子上。
初始状态为1111,目标状态为3333如图所示,按从上往下的顺序,依次处理每一个叶结点,搬动圆盘,问题得解。
2-4把下列句子变换成子句形式:(1)某y(On(某,y)→Above(某,y))(2)某yz(Above(某,y)∧Above(y,z)→Above(某,z))(1)(ANY某)(ANYy){On(某,y)Above(某,y)}(ANY某)(ANYy){~On(某,y)ORAbove(某,y)}~On(某,y)ORAbove(某,y)最后子句为~On(某,y)ORAbove(某,y)(2)(ANY某)(ANYy)(ANYz){Above(某,y)ANDAbove(y,z)Above(某,z)}(命题联结词之优先级如下:否定→合取→析取→蕴涵→等价)(ANY某)(ANYy)(ANYz){~[Above(某,y)ANDAbove(y,z)]ORAbove(某,z)}~[Above (某,y)ANDAbove(y,z)]ORAbove(某,z)最后子句为~[Above(某,y),Above(y,z)]ORAbove(某,z)2-5用谓词演算公式表示下列英文句子(多用而不是省用不同谓词和项。
状态空间法例题状态空间法是一种用于解决动态系统问题的方法,它将问题分解为一系列的状态和转移,通过建立状态方程和转移方程来描述系统的动态行为。
以下是一个简单的状态空间法例题:例题:有一个水池,其容量为V升,初始时水池中有一定量的水。
现在我们要通过一个水泵将水从水池中抽出,每次只能抽出W升的水。
假设水池的初始水量为X升,水泵每分钟抽水Y升,问多长时间T后水池的水量会降到L升以下?根据题意,我们可以定义以下变量:X:初始水量(升)Y:水泵每分钟抽水量(升/分钟)W:每次抽水量(升)V:水池容量(升)L:水池的水量降到L升以下时的目标水量(升)T:所需时间(分钟)状态空间法的基本步骤如下:定义状态变量:在这个问题中,状态变量就是水池的水量。
我们定义当前水池的水量为x(升),并考虑其在时间t(分钟)的变化情况。
建立状态方程:根据状态变量x的定义和题目条件,我们可以建立如下状态方程:x(t+1) = x(t) - W(如果x(t) > L);x(t+1) = x(t) - Y(如果x(t) <= L)。
这个方程描述了在当前状态下,下一时刻状态变量的变化情况。
初始条件:根据题目条件,我们知道初始时水池的水量为X升,即x(0) = X。
求解状态方程:根据状态方程和初始条件,我们可以使用迭代法或数值计算方法求解状态变量在各个时刻的值,直到达到目标水量L 以下。
计算所需时间:根据求解出的各个时刻的状态变量值,我们可以计算出达到目标水量所需的时间T。
通过以上步骤,我们可以使用状态空间法解决这个问题。
需要注意的是,这个方法只适用于线性系统或可以近似为线性系统的非线性系统。
对于复杂的非线性系统,可能需要使用更高级的方法进行求解。
第二章状态空间分析法2-1 状态、状态变量、状态空间、状态方程、动态方程任何一个系统在特定时刻都有一个特定的状态,每个状态都可以用最小的一组(一个或多个)独立的状态变量来描述。
设系统有n个状态变量x1,x2,…,x n,它们都是时间t的函数,控制系统的每一个状态都可以在一个由x1,x2,…,x n为轴的n维状态空间上的一点来表示,用向量形式表示就是:X = (x1,x2,…,xn)TX称作系统的状态向量。
设系统的控制输入为:u1,u2,...,u r,它们也是时间t的函数。
记:U = (u1,u2,...,ur)T那么表示系统状态变量X(t)随系统输入U(t)以及时间t变化的规律的方程就是控制系统的状态方程,如式(2-1)所示。
………………………………………………………………(2-1)其中F = (f1,f2,...,f n)T是一个函数矢量。
设系统的输出变量为y1,y2,...,y m,则Y = (y1,y2,...,y m)T 称为系统的输出向量。
表示输出变量Y(t)与系统状态变量X(t)、系统输入U(t)以及时间t的关系的方程就称作系统的输出方程,如式2-2所示。
…………………………………………………………. (2-2)其中G = (g1,g2,...,g m)T是一个函数矢量。
在现代控制理论中,用系统的状态方程和输出方程来描述系统的动态行为,状态方程和输出方程合起来称作系统的状态空间表达式或称动态方程。
根据函数向量F和G的不同情况,一般控制系统可以分为如下四种:∙线性定常(时不变)系统(LTI-Linear Time Invariant);∙线性不定常(时变)系统;∙非线性定常系统;∙非线性时变系统。
在本课程中,我们主要考虑线性定常系统(LTI)。
这时,系统的动态方程可以表示如下:…………….(2-3)………………(2-4)写成矢量形式为:……………………………………………………………………………(2-5)上式中,A nxn称为系统矩阵,B nxr称为输入(或控制)矩阵。
状态空间算法(State Space Algorithms)是一种基于状态表示和转移的问题求解方法。
它将问题抽象为一个状态空间图,其中每个节点表示问题的一个状态,边表示状态之间的转移。
常见的状态空间算法有以下几种:
1. 深度优先搜索(DFS):从初始状态开始,深度优先搜索算法探索状态空间图的分支,直到达到目标状态或无法继续搜索的情况。
它使用堆栈数据结构来记录访问的状态和路径。
2. 广度优先搜索(BFS):广度优先搜索算法从初始状态开始,逐层扩展搜索状态空间图,直到找到目标状态。
它使用队列数据结构来记录待访问的状态。
3. A* 算法:A* 算法是一种启发式搜索算法,结合了深度优先搜索和广度优先搜索的优点。
它使用估价函数(heuristic function)来评估状态的价值,然后选择具有最佳价值的状态进行搜索以找到目标状态。
4. 迭代深化搜索(IDS):迭代深化搜索算法是一种深度优先搜索的变体,它逐渐增加搜索深度,即增加搜索的最大深度限制,直到找到目标状态为止。
5. 最佳优先搜索(Best-First Search):最佳优先搜索算法根据启发函数计算的估价来选择最有希望导向目标的状态进行搜索。
它使用优先队列数据结构来存储选择状态。
这些算法在不同问题领域中都有广泛的应用,例如图搜索、路径规划、人工智能、游戏和优化等。
选择适当的状态空间算法取决于问题的性质、可行解的数量、计算资源等因素。
状态空间分析法一、内容概要《状态空间分析法》是一篇介绍状态空间理论及其应用的分析文章。
本文首先简要概述状态空间分析法的概念及其相关领域的研究背景。
接着阐述状态空间分析法的理论基础,包括其基本原理、数学工具以及相关技术的理论基础。
然后介绍状态空间分析法在不同领域中的应用实例,包括物理系统、控制系统、信号处理、通信系统等领域的应用情况。
文章还将探讨状态空间分析法的优势与局限性,以及未来可能的发展方向和潜在应用。
对全文进行总结,强调状态空间分析法在科学研究、工程实践等领域的重要性和价值。
1. 介绍状态空间分析法的概念及其在工程、科学、经济等领域的应用状态空间分析法是一种强大的数学工具,广泛应用于工程、科学和经济等多个领域。
本文将详细介绍状态空间分析法的概念及其在各个领域的应用。
状态空间分析法是一种以系统状态为研究对象的数学分析方法。
它以系统的状态变量为核心,通过对状态变量的描述和分析,揭示系统的行为模式和内在规律。
状态空间分析法通过构建状态空间模型,将复杂的系统问题转化为数学模型,便于进行理论分析和数值计算。
在状态空间中,系统的状态可以通过一系列的状态变量来描述,这些状态变量随时间变化,反映了系统的动态行为。
工程领域:在控制工程、信号处理等领域中,状态空间分析法被广泛应用于分析和设计动态系统。
通过构建系统的状态空间模型,可以方便地分析系统的稳定性、响应特性和控制性能。
此外状态空间分析法还可以用于故障诊断和系统识别等领域。
科学领域:在物理学、生物学和医学等自然科学领域,状态空间分析法同样发挥着重要作用。
例如在量子力学和电路分析中,系统的状态可以通过状态空间模型来描述,从而揭示系统的内在规律和特性。
此外在生物医学信号处理中,状态空间分析法也被广泛应用于生物电信号的分析和处理。
经济领域:在经济和金融领域,状态空间分析法被用于分析和预测经济系统的动态行为。
通过构建经济模型的状态空间表示,可以分析经济增长、市场波动和金融风险等问题,为经济决策提供支持。
阻抗法和状态空间法
阻抗法和状态空间法是控制系统理论中常用的两种方法,它们都可以用于建模、分析和控制系统。
阻抗法是一种基于电气工程的方法,它将系统建模为一个由电路元件组成的网络。
在这个网络中,每个元件都有一个电阻和一个电感或电容,它们对应着系统的质量和刚度。
通过对这个网络进行分析,可以得到系统的频率响应和稳定性等信息。
与之相比,状态空间法是一种更为通用的方法,它不限于电气系统,可以适用于各种不同类型的系统。
状态空间法将系统建模为一个由状态、输入和输出组成的方程组,其中状态表示系统的内部状态,输入表示外部输入,输出表示系统的响应。
通过对这个方程组进行求解,可以得到系统的时域和频域响应,以及稳定性等信息。
在实际应用中,两种方法各有优缺点。
阻抗法建模简单,易于分析,但通常只适用于具有线性和时间不变特性的系统。
而状态空间法更为通用,可以适用于各种类型的系统,但建模和分析较为复杂。
因此,在选择使用哪种方法时,需要根据实际情况进行权衡和选择。
对于具有线性和时间不变特性的系统,可以优先考虑使用阻抗法进行建模和分析;对于其他类型的系统,则可以优先考虑使用状态空间法。
- 1 -。