自动控制原理 状态空间法
- 格式:ppt
- 大小:766.50 KB
- 文档页数:77


自动控制原理面试知识自动控制原理是现代控制工程的基础和核心,掌握自动控制原理的知识对于从事控制工程的人员来说至关重要。
在面试中,对自动控制原理的了解和掌握程度往往是面试官考察的重点之一。
本文将为大家总结一些常见的自动控制原理面试知识,希望能够帮助大家在面试中更好地展现自己的能力。
1. 什么是自动控制原理?自动控制原理是一门研究如何设计和分析控制系统的学科。
它主要研究控制系统的建模、系统响应、稳定性和性能等问题。
自动控制原理的目标是设计出稳定、快速、精确的控制系统,使系统能够按照预定的要求进行自动调节和控制。
2. 自动控制系统的基本组成自动控制系统一般由四个基本组成部分构成:输入、输出、反馈和控制器。
输入是指控制系统接收到的外部输入信号,可以是传感器测得的物理量;输出是指控制系统根据输入信号经过处理后产生的输出信号,用于控制被控对象;反馈是指将输出信号与期望输出信号进行比较,并将比较结果反馈给控制器;控制器是指根据反馈信号和期望输出信号计算出控制信号,对被控对象进行控制。
3. 自动控制系统的分类自动控制系统可以根据系统的性质和结构进行分类。
按照系统的性质分类,可以分为连续系统和离散系统;按照系统的结构分类,可以分为单输入单输出系统和多输入多输出系统;按照系统的控制方式分类,可以分为开环控制系统和闭环控制系统。
4. 控制系统的建模控制系统的建模是自动控制原理的重要内容之一。
建模的目的是将控制系统抽象成数学模型,便于进行分析和设计。
常用的建模方法包括传递函数法、状态空间法和频域法等。
传递函数法是一种将系统的输入输出关系表示为有理函数的建模方法。
传递函数是指系统输出与系统输入之间的比值关系,通常用符号G(s)表示。
传递函数法适用于线性定常系统的建模。
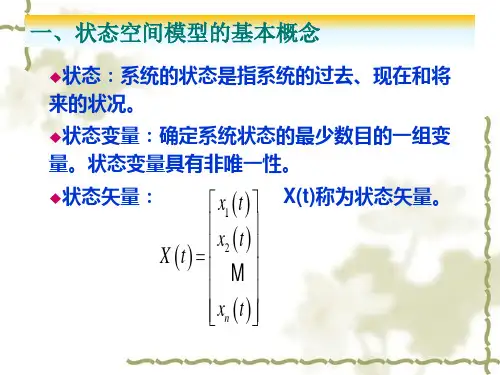
状态空间法是一种将系统的动态行为表示为状态变量和状态方程的建模方法。
状态是指系统在某一时刻的状态,状态方程是指描述状态随时间变化的方程。
状态空间法适用于线性时变系统和非线性系统的建模。

自动控制原理知识点自动控制原理是探讨如何利用各种力量和手段来控制和调节物体或者系统的运行状态的学科。
它是现代科学技术以及工程实践的重要基础,广泛应用于机械、电气、化工、航空航天等领域。
下面将详细介绍自动控制原理的几个重要知识点。
1.控制系统的组成和基本原理控制系统由输入、处理器、输出和反馈四个基本部分组成。
输入是所要控制的物理量或信号,处理器是处理输入信号的部分,输出是系统输出的目标物理量或信号,反馈将输出信号与输入信号进行比较并反馈给处理器进行调节。
控制系统的基本原理是通过调节输入信号,通过反馈来使系统的输出达到期望值。
2.传递函数和状态空间法传递函数是描述线性系统输入输出关系的函数,它是一个复变量的函数。
通过传递函数可以对系统的动态特性进行分析和设计。
状态空间法是一种描述系统行为的方法,用状态向量和状态方程来描述系统的动态特性和稳定性。
3.PID控制器PID控制器是最常见的一种控制器,它由比例(P)、积分(I)和微分(D)三个部分组成。
比例部分使控制器的输出与误差成正比,积分部分用于处理系统的静差,微分部分用于预测系统未来的状态。
通过调节PID控制器的参数,可以实现系统的稳定性和响应速度的优化。
4.反馈控制反馈控制是将系统的输出信号反馈给系统的输入端进行调节的一种控制方式。
反馈控制可以使系统对扰动具有一定的鲁棒性,能够提高系统的稳定性和减小误差。
5.系统稳定性和瞬态响应系统稳定性是指当系统输入和参数在一定范围内变化时,系统输出是否会有无穷大的增长。
常用的判断系统稳定性的方法有稳定判据和根轨迹法。
瞬态响应是系统在调节过程中输出的变化过程,包括超调量、调节时间、稳态误差等指标。
6.系统优化和自适应控制系统优化是指通过调节系统参数使系统达到最佳性能的过程。
自适应控制是指系统能够根据外部环境和内部参数的变化自主调整控制策略的过程。
优化和自适应控制可以使系统具有更好的鲁棒性和适应能力。
7.数字控制系统数字控制系统是利用数字计算和逻辑运算进行控制的一种控制方式。
自动控制原理状态空间设计知识点总结自动控制原理是探讨和研究如何实现系统的自动控制以达到预期目标的学科。
状态空间法是自动控制领域中一种重要的设计方法。
本文将对自动控制原理中的状态空间设计的知识点进行总结。
一、什么是状态空间法状态空间法是自动控制原理中一种用于描述和分析线性时不变系统的方法。
它通过引入状态变量和状态方程的概念,将系统的输入、输出和状态统一起来,从而使得系统的设计和分析更加方便和灵活。
在状态空间法中,系统被描述为一组由状态变量、输入和输出组成的方程,其中状态变量描述了系统的内部状态,输入是系统的外部指令或信号,输出是系统的响应结果。
二、状态空间模型的表示方式1. 状态方程表示状态方程是状态空间模型的一种常用表示方式。
它由一组常微分方程组成,描述了系统状态随时间的变化规律。
一般形式的状态方程可以表示为:dx(t)/dt = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)为n维状态向量,描述系统的内部状态;u(t)为m维输入向量,描述系统的外部输入;y(t)为p维输出向量,描述系统的响应结果;A、B、C、D为系统的系数矩阵。
2. 传递函数表示传递函数是状态空间模型的另一种常用表示方式。
它通过 Laplace 变换将系统的输入、输出表示为复频域函数的比值。
传递函数的一般形式为:G(s) = C(sI - A)^(-1)B + D其中,G(s)为传递函数,s为复变量,I为单位矩阵。
三、状态空间设计的基本步骤1. 确定系统的状态变量状态变量的选择对系统的描述和分析有重要影响。
一般来说,状态变量需要能够全面反映系统的内部状态,并且能够适应系统的控制要求。
2. 建立系统的状态方程根据系统的特点和要求,建立描述系统状态变化规律的状态方程。
可以根据物理原理、经验模型或者系统的观测数据进行建模。
3. 确定系统的输出方程输出方程描述了系统的响应结果如何与状态变量、输入信号相联系。
自动控制系统的传递函数与状态空间表示自动控制系统是一类广泛应用于工业和科学领域的系统,用于监测和控制各种物理过程。
传递函数和状态空间表示是描述自动控制系统行为的两种重要方法。
本文将对这两种表示方法进行详细介绍。
一、传递函数表示方法传递函数是用频域方法描述系统行为的一种数学模型,通常用于线性时不变系统。
一个自动控制系统的传递函数可以通过系统的输入和输出之间的关系来定义。
一般形式的传递函数表示如下:G(s) = N(s) / D(s)其中,G(s)为传递函数,s为复变量,N(s)和D(s)为分子和分母多项式。
传递函数描述了输入信号的变化对输出信号的影响。
传递函数表示方法可以将一个复杂的自动控制系统简化为一个输入输出的关系,便于系统的分析和设计。
通过对传递函数的分析,可以得到系统的稳定性、阶跃响应、频率响应等性能指标。
此外,传递函数表示方法也适用于系统的频域设计和控制器的合成。
二、状态空间表示方法状态空间表示方法是描述自动控制系统行为的另一种数学模型,通常用于线性时不变和时变系统。
状态空间模型通过若干个一阶微分方程来描述系统的行为。
一个n阶线性时不变系统的状态空间模型可以表示为以下形式:x' = Ax + Buy = Cx + Du其中,x为状态向量,A、B、C、D为系统的矩阵参数,u为输入向量,y为输出向量。
状态空间模型将系统的状态、输入和输出统一表示在一个方程组中,可以全面地描述系统的动态特性。
通过对状态空间方程的求解,可以得到系统的时间特性、稳定性、响应等。
此外,状态空间表示方法也适用于系统的时域设计和多变量系统分析。
三、传递函数与状态空间之间的转换传递函数和状态空间之间存在一一对应的关系,可以通过转换方法在两者之间进行转换。
对于线性时不变系统,可以通过矩阵计算和拉普拉斯变换实现转换。
将传递函数转换为状态空间表示时,可以通过分数展开、多项式除法等方法获得状态空间模型的矩阵参数。
将状态空间转换为传递函数表示时,可以使用矩阵运算和拉普拉斯逆变换求解。