仿真作业
- 格式:docx
- 大小:17.28 KB
- 文档页数:3
系统仿真上机作业姓名:屈佳龙学号:04103176班级:041032系统仿真上机作业一、 计算机辅助系统分析:r :单位阶跃N G :非线性器件)1025.0)(1625.0)(110()1()(0++++=s s s s s K s G1.1=N G ,40=K 时,用MATLAB 画出开环Bode 图,求出c ω、βθ。
由其估计出r t 、s t 、%δ答:>> den=conv(conv(conv([1 0],[10 1]),[0.625 1]),[0.025 1]); >> num=[40 40]; >> sys=tf(num,den); >> sys=feedback(sys,1); >> [y,t]=step(sys); >> ytr=find(y>=1); >> [ym,tp]=max(y); >> rise_time=t(ytr(1)) rise_time = 0.7772(上升时间) >>peak_time=t(tp) peak_time = 1.2953 (峰值时间) max_overshoot=ym-1 max_overshoot = 0.8168(超调量) s=length(t);while y(s)>0.98&y(s)<1.02 s=s-1; endsettling_time=t(s+1) settling_time = 17.2280(调整时间) >>bode(num,den)[mag,phase,w]=bode(num,den);[gm,pm,wcg,wcp]=margin(mag,phase,w) gm = 4.3168 (增益裕量) pm = 10.0158 (相位裕量) wcg = 5.1598 (交界频率)yu+ - + )(s G N)(0s Gr ewcp = 2.3975 (增益=0dB 时) Bode 图如下:可得:c ω=5.1598 βθ=10.0158r t =0.7772s s t =17.0985s %δ=81.68%2.1=N G ,40=K 时,用MATLAB 画出根轨迹图,并求出40=K 时的闭环极点;由其估计出r t 、s t 、%δ 答:绘制系统的根轨迹:num=[0 0 0 40 40];den1=conv([1 0],[10 1]);den2=conv([0.625 1],[0.025 1]); den=conv(den1,den2); sys=tf(num,den); [p,z]=pzmap(sys) rlocus(sys)根轨迹图形:系统闭环零极点:程序: sys=feedback(sys,1);[p,z]=pzmap(sys)极点:p = -40.1616-0.2274 + 2.4146i -0.2274 - 2.4146i -1.0837零点:z = -1求r t ,s t ,%δ:根据零极点的特点,取主导极点p=-0.2274+2.4146i 和p=-0.2274-2.4146i ,可以将此系统化为二阶系统个G (s )=sys =有以下程序可求出r t 、s t 、%δ 程序:num=[0 0 5.882]; den=[1 0.4548 0]; sys=tf(num,den)sys=feedback(sys,1); [y,t]=step(sys); ytr=find(y>=1);rise_time=t(ytr(1)) [ymax,tp]=max(y); peak_time=t(tp);max_overshoot=ymax-1 s=length(t);while y(s)>0.98&y(s)<1.02 s=s-1; endsettling_time=t(s)结果:rise_time =0.7772max_overshoot = 0.7438settling_time = 16.9691可得:r t =0.7772s s t =16.9691s %δ=74.38%3.1=N G ,40=K :仿真之,并由仿真结果求出r t 、s t 、%δ 答:建立系统模型用自适应变步长方法(ode45)仿真可得:观察上图可知:超调量约为80%、上升时间Tr 约为0.5S ;调整时间Ts 约为18S 。
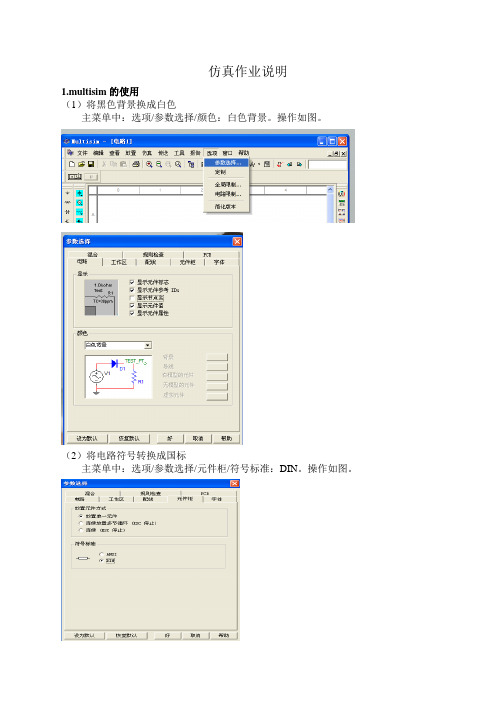
仿真作业说明1.multisim的使用(1)将黑色背景换成白色主菜单中:选项/参数选择/颜色:白色背景。
操作如图。
(2)将电路符号转换成国标主菜单中:选项/参数选择/元件柜/符号标准:DIN。
操作如图。
(3)取元件元件库如图所示,其中绿色底为理想元件库(元件参数可更改),灰色底为实际元件库(参数与生产厂家相同,不可更改)。
单击图标即可打开相应的库,选中欲用元件点击后移动鼠标,在工作区适当位置点击鼠标即可放置该元件。
(4)元件参数修改双击该元件,即可弹出属性框,电阻元件属性框如图所示。
输入修改的阻值,并可点击右边上下箭头改变其单位(默认为kΩ)。
(5)元件的移动与旋转、连接元器件的移动:将鼠标移到元器件上,按住左键,可将元器件拖曳到所需的位置。
元器件的旋转:用鼠标右键单击元器件,弹出一个元器件操作对话框。
选择适当命令,可使元器件左右翻转、上下翻转、顺时针旋转90°或逆时针旋转90°。
元器件的连接:先将鼠标指向某个元器件的一个端点,鼠标指针消失,在元器件端点处出现一个带十字花的小园黑点。
再单击鼠标左键,移到鼠标,会引出一条黑色的直线或折线,将鼠标拉向另一元件的一个端点,并使其出现一个小园红点,然后单击鼠标左键,黑线变红线,实现这两个元件间的有效连接。
(6)运行仿真为仿真运行按钮,按下“1”为运行,“0”为停止。
(1)为方便起见,元件尽量从理想元件库中调用。
(2)元件调用电压源、地(每个电路必须设有地才可运行软件)从电源库调用;电流源从信号源库调用;电阻从基本元件库调用;电压表、电流表从指示元件库调用;万用板从测量仪表库调用;(3)使用multisim仿真功能分析各结点电位的方法主菜单中:选项/仿真/分析/直流工作点分析。
操作如图。
DC工作点分析对话框如图所示:输出变量用于选定需要分析的节点。
左边“电路变量”内列出电路中各节点电压变量和流过电源的电流变量。
右边“为了分析选择变量”栏用于存放需要分析的节点。
arena仿真案例作业Arena是一种仿真软件,用于模拟和分析复杂的系统。
它可以用于各种领域的仿真,如生产、物流、交通等。
本文将介绍一些使用Arena仿真的案例,以展示其在实际应用中的作用。
1. 生产线优化在一个制造工厂中,使用Arena仿真来优化生产线的布局和工序安排。
通过模拟不同的工艺流程和生产线配置,可以找到最佳的生产方案,以提高生产效率和减少生产成本。
2. 物流调度在一个物流中心中,使用Arena仿真来优化货物的调度和运输路线。
通过模拟不同的调度算法和路线规划策略,可以找到最优的货物分配方案,以提高物流效率和减少运输成本。
3. 供应链管理在一个供应链中,使用Arena仿真来优化供应商选择、库存管理和订单处理等环节。
通过模拟不同的供应链策略和管理方法,可以找到最佳的供应链配置方案,以提高供应链的可靠性和响应能力。
4. 客流分析在一个交通枢纽中,使用Arena仿真来分析客流量和人员流动。
通过模拟不同的交通规划和站点布局,可以找到最佳的交通方案,以提高交通效率和减少拥堵情况。
5. 医院排队在一个医院中,使用Arena仿真来优化患者的排队和就诊流程。
通过模拟不同的排队算法和就诊规则,可以找到最佳的医疗服务方案,以提高就诊效率和患者满意度。
6. 电力系统在一个电力系统中,使用Arena仿真来优化电力的调度和供应。
通过模拟不同的电力调度策略和供应方案,可以找到最佳的电力运营方案,以提高电力供应的可靠性和效率。
7. 金融风险管理在一个金融机构中,使用Arena仿真来分析和管理风险。
通过模拟不同的风险事件和投资策略,可以评估风险暴露和损失潜力,以制定最佳的风险管理方案。
8. 零售店铺布局在一个零售店铺中,使用Arena仿真来优化商品陈列和店员安排。
通过模拟不同的陈列方案和人员调度策略,可以找到最佳的店铺布局方案,以提高销售额和客户满意度。
9. 城市规划在一个城市中,使用Arena仿真来分析人口流动和资源分配。

系统仿真II 大作业自06A-2 赵众源 061010102151、考虑如下的微分方程:(1)试在Matlab 环境下采用Euler 法编制其仿真程序,给出在[0,10]秒区间上y 的变化曲线。
(2)试在Matlab —Simulink 环境下搭建仿真模型,给出在[0,10]秒区间上y 的变化曲线。
(3)考虑带有输入的情况:在Matlab —Simulink 环境下进行仿真,给出在[0,10]区间上y 的变化曲线。
(1)在M 文件中创建Euler 函数:function [t,y]=euler(odefun,tspan,y0,h) t=tspan(1):h:tspan(2);y(1)=y0; for i=1:length(t)-1y(i+1)=y(i)+h*feval(odefun,t(i),y(i)); endt=t';y=y';在命令窗口得到y 的变化曲线: odefun=inline('2*y*sin(t)-abs(y^3)','t','y'); >> [t,y]=euler(odefun,[0,10],1,0.01); plot(t,y)3()(,)2()sin |()|,(0)1dy t f t y y t t y t y dt==-=3()(,)2()sin |()|(),(0)1,()2cos 2dy t f t y y t t y t u t y u t t dt ==-+==0.20.40.60.811.21.4(2)试在Matlab —Simulink 环境下搭建仿真模型,给出在[0,10]秒区间上y 的变化曲线。
(3)考虑带有输入的情况:在Matlab —Simulink 环境下进行仿真,给出在[0,10]区间上y 的变化曲线。
3()(,)2()sin |()|(),(0)1,()2cos 2dy t f t y y t t y t u t y u t t dt ==-+==2、下图是有电阻R=5、电感L=10和电容C=1组成的无源网络(1)试列写以Ui为输入量,Uo为输出量时网络的微分方程;(2)在Matlab-Simulink环境下搭建仿真模型,假设Uo的初始值为2,试给出Ui=5sin(10t)时Uo在[0, 15]区间上的变化曲线。

仿真计算1、在PSCAD中建立经典旳同步发电机模型,对同步发电机出口三相短路进行仿真研究。
规定:(1)运行“同步发电机短路”模型,截取定子三相短路电流波形,并对波形进行分析,验证与理论分析中包括旳多种分量与否一致;图一同步发电机短路模型图二、定子三相短路电流定子三相短路电流中具有直流分量和交流分量,其中周期分量会衰减。
三相短路电流直流分量大小不等,但衰减规律相似,均按指数规律衰减,衰减时间常数为Ta,由定子回路电阻和等值电感决定,大概在0.2s。
交流分量也按指数规律衰减,它包括两个衰减时间常数,分为次暂态过程、暂态过程和稳态过程。
(2)修改电抗参数Xd(Xd’,X’’d),增长或者减小,截取定子三相电流,并与第一步成果对比分析;图一是Xd`=0.314 p.u,Xd``=0.280 p.u状况下旳定子电流波形;图二是Xd`=0.514 p.u, Xd``=0.280 p.u状况下旳定子电流波形。
显然,伴随Xd`旳增大定子旳电流在减少。
图三、定子三相短路电流(3)修改时间常数Td(Td’,T’’d),增长或者减小,截取定子三相电流,并与第一步成果对比分析。
参数Td’=6.55s ,Td”=0.039s时定子电流如图一所示;当参数变为Td’=3.55s ,Td”=0.039s是定子电流如图三所示,显然图四、定子三相短路电流2、运用暂态仿真软件对下面旳简朴电网进行建模,对模型中各元件参数进行详细阐明,并进行短路计算。
将故障点旳电流电压波形及线路M端旳电流电压波形、相量图粘贴到课程汇报上。
规定:(1)短路类型为①三相故障;②A相接地;③BC两相故障。
(2)两端系统电势夹角取15oδ=。
(3)故障点设置为线路MN中点(25km处)。
(4)仿真成果包括M、N两侧和短路点处旳三相电压、电流旳瞬时值波形和短路发生后时刻旳三相电压、电流相量图。
三、课程学习心得通过本课程旳学习,你有哪些体会和心得,请写出来。
可以从如下几种方面考虑,但不局限于这些方面:通过课程你学到了哪些知识;学会了哪些措施;对电力系统旳认识;对课程旳提议等。

ANSYS仿真分析作业ANSYS仿真分析是一种通过计算机模型和数值方法来模拟和预测物理过程的技术。
它可以帮助工程师优化设计、提高产品性能、预测产品寿命、降低成本和减少开发周期。
ANSYS仿真分析可以应用于各种工程领域,包括机械工程、电气工程、土木工程、航空航天工程等。
在机械工程中,ANSYS仿真分析可以模拟机械零件的应力、应变、变形、振动等特性。
通过这些分析,工程师可以评估零件的可靠性、确定最佳材料和设计参数,并优化零件的结构。
在电气工程中,ANSYS仿真分析可以模拟电路、电磁场、电动机、变压器等电气设备的性能。
通过这些分析,工程师可以优化电路的布局、提高电气设备的效率、解决电磁干扰问题等。
在土木工程中,ANSYS仿真分析可以模拟建筑物、桥梁、大坝等结构的应变、变形、破坏等特性。
通过这些分析,工程师可以优化结构的设计、确保结构的稳定性和安全性,以及评估结构在极端负载下的行为。
在航空航天工程中,ANSYS仿真分析可以模拟飞机、航天器、火箭等系统的气动特性、结构特性等。
通过这些分析,工程师可以优化飞行器的设计、提高飞行器的性能、降低燃料消耗等。
下面我将介绍两个案例研究,以帮助读者更好地理解ANSYS仿真分析的应用。
首先是汽车碰撞仿真。
工程师可以使用ANSYS仿真分析来模拟汽车碰撞时的应力和变形情况,以预测汽车的安全性能。
通过这些分析,工程师可以评估不同设计对碰撞能量吸收和乘员保护的影响,并优化汽车的结构,提高碰撞安全性。
另一个案例是风力发电机叶片的优化设计。
工程师可以使用ANSYS仿真分析来模拟风力发电机叶片在风载荷下的应力和变形情况,以评估叶片的性能。
通过这些分析,工程师可以优化叶片的结构和材料,提高叶片的效率和寿命。
总结起来,ANSYS仿真分析是一种强大的工程工具,可以在不同领域中应用。
它可以帮助工程师优化设计、提高产品性能、预测产品寿命、降低成本和减少开发周期。
希望这篇文章可以为读者对ANSYS仿真分析有一个初步的了解,并鼓励他们在自己的工作中应用这一技术。
项目一:游梁式抽油机某游梁式抽油机模型见图1。
该抽油机减速箱为两级减速,有三根轴和两组齿轮组成。
各齿轮的参数见表1。
抽油机冲次为3次/分,抽油机运行时从当前位置向下移动。
试进行如下分析:(每小题10分,共计40分)a.分别分析两个配重与四个配重无悬点载荷条件下输入轴的扭矩大小,绘制其扭矩变化曲线,并分析电机做正功与负功的区间。
b.悬点载荷上冲程为8吨,下冲程为6吨时,分析两个配重与四个配重条件下输入轴扭矩变化,绘制变化曲线。
c.根据上述结果,试分析配重变化与悬点载荷变化对扭矩的影响。
d.绘制四个配重施加悬点载荷条件下驴头沿竖直方向的速度变化曲线。
题图1 游梁式抽油机模型图题表1 减速箱齿轮参数序号名称齿轮模数齿数传动比1 高速传动端输入轴齿轮8 174.88 中间轴大齿轮8 832 低速传动端中间轴小齿轮8 206.5 输出轴齿轮8 130问题解答1. 问题a1.1 创建模型(1)导入模型按照图示步骤,导入相关模型。
(2)简化模型先对各个零部件进行重命名,然后再进行模型的简化。
在进行模型简化时,需要通过布尔运算将两个无相对运动并且有接触的部件进行布尔操作。
简化后如图:1.2添加约束(1)固定副按照图示过程,在连接中选择固定副。
考虑系统整体的运动过程和规律,确定相对于地面不发生运动的部件及各部件相互之间没有相对运动的部件,创建固定副。
(2)旋转副在左侧的图标中选择旋转副,默认的就是2 Bodies-1Locations,依次选择第一个body 和第二个body,然后选择旋转副的位置,即可创建旋转副。
确定旋转副位置时注意要选择中心位置。
图示左半部分为创建过程,右半部分为创建完成后的旋转副。
(3)齿轮副由齿轮副的命令窗口可以看出,齿轮副实际上是在确定的位置上(common velocity maker)、于两个相对于大地的旋转副之间创建的,所以我们在上文建立了齿轮轴与大地之间的的转动副。
再创建同速标记点。
题目特别说明:以下所有题目中各进口道流量自行设置,机动车车辆构成、机动车期望速度、非机动车期望速度和行人期望速度如无特殊说明自行设置。
仿真时长均为3600秒。
机动车车道宽度均为3.5米。
1、图1中交叉口1和交叉口2均为信号控制交叉口,信号配时方案相同,信号周期均为120秒,各相位的黄灯时间均为3秒,东西向直行为第一相位(绿灯时间35秒)东西向左转为第二相位(绿灯时间为19秒),南北向左转为第三相位(绿灯时间为38秒),南北向左转为第四相位(16秒)。
对图1中交叉口1和交叉口2由东向西方向进行干线信号协调,并通过仿真计算出最佳相位差,分别给出相位差为0和最佳相位差下所有车辆在仿真时间段内的平均延误。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向四车道双向六车道交叉口1 交叉口2图12、图2中交叉口1和交叉口2均为信号控制交叉口,信号配时方案相同,信号周期均为120秒,各相位的黄灯时间均为3秒,东西向直行为第一相位(绿灯时间35秒)东西向左转为第二相位(绿灯时间为19秒),南北向左转为第三相位(绿灯时间为38秒),南北向左转为第四相位(16秒)。
对图1中由东向西方向进行公交仿真,要求包含两条公交线路,一条包含一个港湾式公交站点,另一条包行一个路边式站点和一个港湾式公交站点,站点位置自行设置。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向六车道双向四车道交叉口1交叉口2图23、 图3中交叉口1和交叉口2均为无信号控制交叉口,根据课件中无信号控制十字交叉口的让行规则进行仿真。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向四车道双向四车道交叉口1交叉口2主路 次路 次路 图34、 图4中交叉口1和交叉口2均为无信号控制交叉口,根据课件中无信号控制交叉口的让行规则进行仿真。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
作业现场虚拟仿真训练:提高工作效率、降低风险的最新趋势作为一种新兴的培训方式,虚拟仿真训练在生产制造、建筑工程、医疗行业等各个领域得到了广泛应用。
在这些领域中,尤其受到重视。
这种训练方式通过真实场景的模拟,使学员在虚拟环境中进行实践,充分锻炼技能,提高操作效率,并在保证安全的前提下降低风险。
当然,的应用不仅仅局限于实践操作,它还可以帮助人们更好地了解作业现场的环境和流程,增加对作业对象的认识和理解,有利于形成正确的作业方法和思路,提高工作质量。
如何进行在进行时,首先需要进行场景建模。
这需要使用专业的3D建模软件进行模型设计,并将场景中各个元素进行定位和组合,以呈现出具有真实感的场景。
建模完成后,需要使用虚拟现实技术进行模拟呈现。
一些先进的仿真软件和虚拟现实设备可帮助学员具体感受到操作时的体验,并实时反馈偏差、危险因素等情况,提醒学员改正错误。
为了达到更好的效果,模拟可以在不同的条件下进行。
例如,可以将虚拟模型放置在多种不同的场景中,考虑到各种不同的情况和氛围。
这使得学员们可以真正学会在压力下、有障碍和限制的情况下运用所需技能。
不仅如此,还可以结合人工智能技术,针对学员的表现进行实时监测和评估,为下一次训练提供准确的反馈和改进。
优点和应用领域有许多优点。
首先,它可以有效地提高培训和工作效率。
与传统的培训方式相比,虚拟仿真训练将大幅度减少人力和物力资源的消耗,避免对现场操作的影响,大大提高了培训和工作的效率。
其次,它可以降低风险。
实际操作中,承担各种风险的成本很高,并且在训练中出现重大失误可能会导致更高的成本。
通过虚拟仿真训练,可以降低因操作失误而引起的人员伤亡和设备损坏的风险。
最后,它可以适用于多种应用领域。
除了生产制造、建筑工程、医疗行业外,还可以在军事、航空、汽车制造等领域得到广泛应用。
这种训练方式具有高度的可定制性,可以根据不同领域的需求进行各种调整和优化。
结语随着技术的不断革新和进步,将成为一个越来越重要的工具。
1、软件概述
(1)、PSASP介绍
电力系统分析综合程序(Power System Analysis Software Package)简称PSASP。
它基于电网基础数据库、固定模型库以及用户自定义模型库的支持,可进行电力系统(输电、供电和配电系统)的各种计算分析。
该软件的体系结构是基于公用数据和模型的三层体系结构:第一层:公用数据和模型的的资源库;第二层:基于资源库的应用程序包;第三层:计算结果库和分析工具。
PSASP基础数据库包括文本和图形两种录入编辑方式的电网基础数据库,是支持 PSASP 各种计算的公用数据,包含发电机、变压器、交流线、负荷、直流线、静止无功补偿器等电网基本元件。
有文本和图形两种数据录入编辑方式,可提供各种分析计算的基本数据支持,可按地区、年度、运行方式从中抽取计算的基本数据。
同时,PSASP 设计了功能强大的用户自定义(UD)建模方法,提供了自行建模来研究电力系统新设备、新装置的得力工具。
所谓用户自定义建模方法是在无须了解程序内部结构和编程设计的条件下,用户可按自己计算分析的需要,用工程技术人员熟悉的概念和容易掌握的方法,设计各种模型,使其在原则上可以灵活模拟任何系统元件、自动装置和控制功能。
为扩充PSASP的功能,向用户开放提供非常有力的工具。
可自由建立任何元件的模型(电源、负荷、各种控制保护装置、FACTS元件等),作为各种计算的模型库。
基于公用资源的交直流电力系统分析程序包,可已完成以下任务,潮流计算、暂态稳定、短路电流、网损分析、电压稳、静态安全分、静态和动态等值、直接法暂态稳定、小干扰稳定、最优潮流和无功优化、参数优化协调、继电保护整定与仿真。
(2)、MATPOWER介绍
MATPOWER是一个基于matlab.m文件的组建包,用来解决电力潮流和优化潮流的问题。
它致力于提供一种易于使用和可更新的仿真工具。
MATPOWER的设计理念是用尽可能简单易懂的代码来实现最优的功能。
最初的基于MATLAB的电力系统潮流和最优潮流代码和为项目POWER WEB设计的。
MATPOWER是一直广泛应用于电力系统的仿真分析,它具有较好的扩展和衍生功能,从而更好的对现实中的电力系统进行模拟,分析和仿真计算。
2、matpower程序介绍
(1)、数据格式
MATPOWER所用的数据文件均为MATLAB的M文件或者MAT文件,用来定义和返回变量,如baseMVA、bus、branch、gen等。
baseMVA变量是一个标量,用来设置基准容量。
对于计算中采用有名值,可以根据需要设置,如100MVA;对于计算中采用标幺值,一般设置为1。
Bus变量是一个矩阵,用来设置电网中各母线参数,其格式为:bus_i、type、Pd、Qd,Gs、Bs、area、Vm、Va、baseKV、zone、Vmax、Vmin。
其中bus_i用来设置母线编号,范围为1~29997。
type用来设置秒母线类型,1为PQ节点母线,
2为PV节点母线,3为平衡节点母线。
Pd和Qd用来设置母线注入负荷的有功和无功功率。
Gs和Bs用来设置与母线并联的电导和电纳。
baseKV用来设置该母线基准电压。
Vm和Va用来设置母线电压的幅值相位初值。
Vmax和Vmin用来设置工作时母线最高最低电压幅值。
area和zone用来设置电网断面号和省号分区号,一般都设置为1,前者可以设置的范围是1~100,后者可设置范围为1~999。
Branch变量也是一个矩阵,用来设置电网中各支路参数,其格式为:fbus tbus r x b rateA rateB rateC ratio angle status 。
fbus和tbus用来设置该支路由起始节点(母线)编号和终止节点(母线)编号。
r、x、b用来设置该支路的电阻,电抗和充电电纳。
rateA rateB rateC 分别用来设置支路长期、短期和紧急允许功率。
ratio用来设置该支路的变比,如果支路元件仅仅是导线,该值为0;如果支路元件为变压器,则变比为f1,us侧母线的基准电压与thus侧母线的基准电压之比。
angle用来设置支路的相位角度,如果支路元件为变压器,就是变压器的转角;如果支路元件不是变压器,相位角度为0。
Status用来设置支路工作状态,1表示投入运行,0表示退出运行gen变量是一个矩阵,用来设置接入电网中的发电机(电源)参数,其格式为:bus、Qg、Qmax、Qmin、Vg、mBase、status、Pmax、Pmin。
Bus用来设置接入发电机(电源)的母线编号。
Pg和Qg用来设置接入发电机(电源)的有功和无功功率。
Pmax和Pmin用来设置接入发电机(电源)的有功功率的最大最小允许值。
Qmax和Qmin用来设置接入发电机(电源)的无功功率最大最小允许值。
Vg用来设置接入发电机(电源)的工作电压。
mBase用来设置接入发电机(电源)的功率基准,如为缺省值,就是base~1VA变量的值。
status用来设置发电机(电源)工作状态,1表示投入运行,0表示退出运行。
(2)、电力潮流
MATPOWER 拥有 5 种潮流计算方法,他们可以通过 runpf 来调用。
除了可以输出到屏幕之外(作为默认方式),runpf 还可以有以下的返回选项可以选择参数来输出解:
>> [baseMVA,bus,gen,branch,success,et]=runpf(casename);
这些解的值被存储在以下的结果中:
bus(:,VM) bus voltage magnitudes(母线电压幅值)
bus(:,VA) bus voltage angles (母线电压相角)
gen(:,PG) generator real power injections(发电机有功输入)
gen(:,QG) generator reactive power injections(发电机无功输入)
branch(:,PF) real power injected into “from” end of branch(支路首端的有功输入)
branch(:,PT) real power injected into “to” end of branch(支路末端的有功输入)
branch(:,PT) real power injected into “to” end of branch(支路末端的有功输入)
branch(:,QF) reactive power injected into “from” end of branch(支路首端的无功输入)
branch(:,QT) reactive power injected into “to” end of branch(支路末端的无功输入)
success 1=solved successfully,0=unable to solve(1 表示计算成功,0 表示
失败)
et computation time required for solution(计算所用时间
默认的潮流计算方法是标准的潮流法,采用全雅克比矩阵,迭代求解。
(3)最优潮流
MATPOWER 提供多种解算最优潮流问题(OPF)的方法,可以通过访问函数runopf 的方法实现。
除了提供将计算结果输出到屏幕之外(默认),runopf 函数还可以通过设置以下的参数返回解到其他地方。
>>[baseMVA,bus,gen,gencost,branch,f,success,et]=runopf(casename); (4)机组组合算法
标准最优潮流方法中我们并没有处理运行昂贵的机组完全停机的问题,取而代之的是在调度时将机组出力限制在最小技术出力之上。
MATPOWER 提供了在一段时间内出力机组启停的办法来关停那些运行昂贵的机组以寻求最小成本的组合和调度。
输入
>>runuopf(‘case30’)
MATPOWER 采用了一种类似于动态规划的算法来处理这些机组退出。
它通过一组层级来处理,其中层级N 表示有N 台机组被关闭,以N=0 开始。
算法的执行过程如下:
步骤1:开始层级0(N=0),认为所有的机组都在线并且所有的约束都存在。
步骤2:解普通的最优潮流。
保存解作为当前最佳。
步骤3:到下一个层级,N=N+1。
使用上一步所得到的最佳解作为当前层级的基础形成一个最小机组限制组合的机组候选序列,如果没有候选,跳到步骤5。
步骤4:对每一个候选序列中的机组,解当该机组关闭时的最优潮流,如果该机组关闭对应的整个系统成本低于当前最佳值,以该解作为当前最佳解。
如果每一个候选值都能进一步降低成本,返回到步骤3。
步骤5:返回当前最优解作为最终解。