系统仿真技术大作业
- 格式:pdf
- 大小:591.16 KB
- 文档页数:23
《计算机仿真技术》课程大作业课程名称:流水线系统仿真优化学校:班级:工业工程071班姓名:学号:指导老师:日期:2010年6月25日目录0 模型概述 (2)1 仿真建模过程 (2)1.1 定义元素 (2)1.2 建模元素详细设计 (4)1.2.1 简单方法 (4)1.2.2 其他方法 (4)1.2.3 零部件明细(Part detail information) (4)1.2.4 机器明细(Machine detail information) (5)1.2.5 输送带明细(Conveyor detail information) (8)1.2.6 暂时放置与output (10)2 建立元素之间的逻辑规则 (14)3 运行仿真模型 (18)4 仿真模型的结果分析 (19)6 仿真小结 (22)0 模型概述模型内容:休斯直升飞机回转驱动机械的零件加工改善。
其中该零件毛坯为精密铸锻件,按批量生产方式生产。
先用车床车削夹具的基面,用钻床钻T/H基准孔,再用铣床铣键槽和外圆边,最后是成品保管。
共14道工序,其中加工次数为4次,检验为3次,搬运次数为5次。
14道工序依次为车削底盘、搬往下一工序、钻TH基准孔、检查、搬到下一工序、铣键槽和外圆边、检查尺寸、搬到下一工序、加工底盘、搬到下一工序、暂时放置、搬到下一工序、检查尺寸、保管成品。
1 仿真建模过程1.1 定义元素点击designer elements窗口的机器machine图标,使其变成可选项,将光标移向系统布局窗口window 1的位置,然后单击左键,在系统布局窗口出现机器(Machine001)图标,同时在元素选择窗口element selector中的simulation页下出Machine001:1图标;当鼠标在window 1中选中Machine001,鼠标光标成十字形时,可以在屏幕范围内拖动元素到所适当的位置,此display edit工具栏必须打开,同时关于window1的window control中的movable display选项必须选中。
《机械系统设计仿真》大作业一、简答题(30分,每题5分)1、机械系统设计的基本问题是什么?答:机械系统设计的基本问题是机构的综合、运动学和动力学分析与设计。
2、求解动力学的两个基本问题是什么?答:两个基本问题是:一、动力学逆问题,己知运动求力;二、动力学正问题,已知力求运动。
3、简述牛顿—欧拉法的解题步骤。
答:采用牛顿—欧拉方法的基本步骤是先将系统的约束解除,分割成若干个单个的刚体或质点,然后对每个刚体或质点应用牛顿第二定律和欧拉动力学方程一一建立运动微分方程。
4、简述主工具箱上部的12个图标的功能,如图1所示。
:5、鼠标的右键操作主要应用于哪些场合?答:使用鼠标右键的场合主要有:1)显示建模过程中屏幕亡的各种对象的弹出式菜单,例如:构件、标记、约束、运动、力等。
2)在各种输入对话框中的参数文本输入栏,显示输入参数的弹出式菜单。
3)在后处理过程中,显示曲线图中各种对象的弹出式菜单,例如:曲线、标题、坐标、符号标记等。
4)在主工具箱、快捷工具栏等有工具图标集的场合,显示所选择的工具图标集的所有图标命令。
图16、解释几何样机的参数化建模,并指出ADAMS /View 提供的4种参数化建模方法。
答:1.参数化建模是将样机的建模参数设置为可以改变的变量、表达式和函数,在分析过程中,只需改变样机模型中有关参数值,程序就可以自动地更新整个样机模型,获得新的样机模型,以便预先设置可变参数,自动地进行一系列的仿真分析,研究一个或多个参数变化对样机性能的影响,获得最危险的操作工况以及最优化的设计结果。
2.ADAMS /View 提供了4种参数化建模方法:使用参数表达式、参数化点坐标、关联移动和使用设计变量。
二、图2所示为一单摆,质量为m ,摆长为l 。
设摆的悬点P 沿x 轴按x p =Asin ωt 运动,讨论系统的自由度,并写出约束方程。
(10分) 解:M 、P 共有2×N =4个坐标,系统满足3个完整约束X P =Asin ωt Y P =0(X m -Y p )2+Y m 2=L2该系统没有非完整约束,因此是一个完整系统,其自由度数为4-3=1。
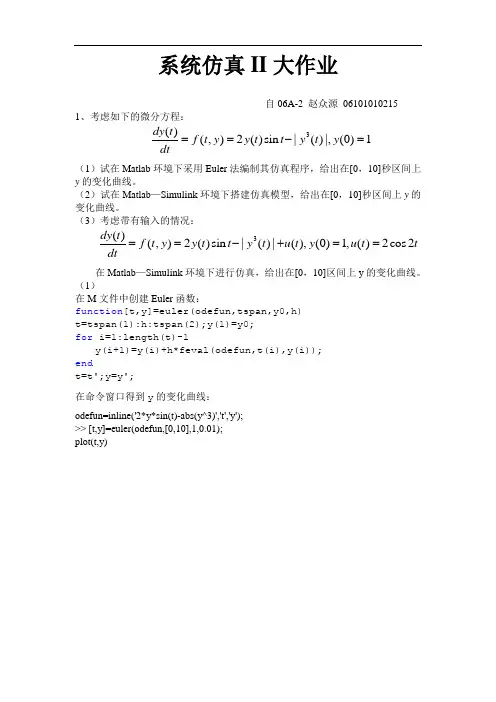
系统仿真II 大作业自06A-2 赵众源 061010102151、考虑如下的微分方程:(1)试在Matlab 环境下采用Euler 法编制其仿真程序,给出在[0,10]秒区间上y 的变化曲线。
(2)试在Matlab —Simulink 环境下搭建仿真模型,给出在[0,10]秒区间上y 的变化曲线。
(3)考虑带有输入的情况:在Matlab —Simulink 环境下进行仿真,给出在[0,10]区间上y 的变化曲线。
(1)在M 文件中创建Euler 函数:function [t,y]=euler(odefun,tspan,y0,h) t=tspan(1):h:tspan(2);y(1)=y0; for i=1:length(t)-1y(i+1)=y(i)+h*feval(odefun,t(i),y(i)); endt=t';y=y';在命令窗口得到y 的变化曲线: odefun=inline('2*y*sin(t)-abs(y^3)','t','y'); >> [t,y]=euler(odefun,[0,10],1,0.01); plot(t,y)3()(,)2()sin |()|,(0)1dy t f t y y t t y t y dt==-=3()(,)2()sin |()|(),(0)1,()2cos 2dy t f t y y t t y t u t y u t t dt ==-+==0.20.40.60.811.21.4(2)试在Matlab —Simulink 环境下搭建仿真模型,给出在[0,10]秒区间上y 的变化曲线。
(3)考虑带有输入的情况:在Matlab —Simulink 环境下进行仿真,给出在[0,10]区间上y 的变化曲线。
3()(,)2()sin |()|(),(0)1,()2cos 2dy t f t y y t t y t u t y u t t dt ==-+==2、下图是有电阻R=5、电感L=10和电容C=1组成的无源网络(1)试列写以Ui为输入量,Uo为输出量时网络的微分方程;(2)在Matlab-Simulink环境下搭建仿真模型,假设Uo的初始值为2,试给出Ui=5sin(10t)时Uo在[0, 15]区间上的变化曲线。
控制系统仿真大作业1、曲线拟合的Matlab实现和优化度检验通过一个实际的例子,介绍最小二乘曲线拟合法的基本原理,对最小二乘曲线拟合法的Matlab实现方法进行研究,并给出曲线拟合Matlab实现的源程序。
论述了Matlab软件在做曲线拟合时的用法,并进行曲线的拟合和相应的图像。
2、基于Matlab的液位串级控制系统运用组态王和Matlab混合编程的方法设计了一个双容(两个水箱串联)液位串级在线控制系统,由组态王编制人机交互界面,用Matlab完成控制算法,二者通过DDE进行实时数据交换;采用串级控制策略,减小二次干扰的影响,验证其方法的有效性。
3、基于Matlab的变压器差动保护闭环仿真研究应用Matlab建立了微机保护仿真系统,并对不同原理的变压器差动保护进行了仿真和比较.仿真系统采用积木式结构,根据微机保护的实现原理构建模块,实现保护的闭环仿真,对保护的动作过程进行分析.4、基于MATLAB/SIMULINK的交流电机调速系统建模与仿真根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造了一个交流电机调速系统,该系统能够很好地模拟真实系统,实现高效的调速系统设计。
仿真结果验证该方法的有效性。
5、基于MCGS和MATLAB的薄膜厚度控制系统仿真以MCGS组态软件和MATLAB为平台,设计和仿真了一个薄膜厚度控制系统.MCGS完成硬件接口的设置、数据的实时采集、人机对话、以动画的方式显示控制系统的运行情况,MATLAB完成PID参数的自动整定,并利用动态数据交换(DDE)技术建立两者间的通讯.并分析其仿真结果。
6、Matlab在动态电路分析中的应用用Matlab计算动态电路,可得到解析解和波形图.一阶电路先计算3要素,后合成解析结果;RLC串联和并联的二阶电路采用自编的通用函数计算,自编函数采用了Matlab求解微分方程的符号运算方法;一般的二阶电路和高阶电路采用拉氏变换列写电路方程,再用拉氏反变换得到解析结果.通过实例分析,展现了Matlab在动态电路分析方面的优越性.7、基于Matlab异步电机矢量控制系统仿真根据异步电机的模型,提出了一种异步电机矢量控制系统建模仿真方案, 建立电机模型,仿真验证所建电机模型的正确性.8、基于MATLAB的PID算法在串级控制系统中的应用设计一个双容无自衡串级液位控制系统,并将基于MATLAB的增量式PID算法应用在控制系统中.结合基于计算机控制的PID参数整定方法实现串级控制,并分析仿真系统的控制精度和稳定性9、中央空调控制系统的MATLAB仿真运用PID算法,利用MATLAB仿真技术对经验法建立的中央空调控制系统模型进行仿真,通过Matlab仿真分析。

电力系统分析课程报告姓名******学院自动化与电气工程学院专业控制科学与工程班级*****************指导老师******二〇一六年六月十六1同步发电机三相短路仿真计算1.1仿真模型的建立根据老师给的三相同步发电机模型做了修改(空载)。
同步发电机三相短路实验仿真研究的模型如下图所示:图1.1 同步发电机三相短路仿真研究的模型1.2 PSCAD中的仿真结果1.2.1 发电机出口电压Ea。
发电机出口电压Ea,如下图所示:图1.2 发电机出口电压Ea1.2.1 衰减时间常数Ta对于直流分量的影响励磁电压和原动机输入转矩Ef与Tm均为定常值1.0,且发电机空载。
当运行至0.5056s时,发电机发生三相短路故障。
定子三相短路电流中含有直流分量和交流分量,三相短路电流的直流分量大小不等,但衰减规律相同,均按指数规律衰减,衰减时间常数为Ta,由定子回路的电阻和等值电感决定,大约0.2s。
PSCAD同步发电机模型衰减时间常数Ta(Ta=0.235s)对应位置下图所示。
图1.3 同步发电机参数Ta设置图(1)当衰减时间常数Ta=0.235s时,直流分量(If)的衰减过程如下图所示。
图1.4 直流分量的衰减波形(2)当衰减时间常数Ta=0.125s的参数设置、直流分量(If)的衰减过程如下图所示。
图1.3 同步发电机参数Ta设置图图1.4 直流分量的衰减波形1.2.2 短路时间不同的影响同步发电机出口三相短路的时间不同对三相短路电流的影响:短路电流的直流分量起始值越大,短路电流瞬时值就越大;直流分量的起始值与短路时间的电流相位直接关系。
短路时间参数设置如下图所示:图1.5 短路时间参数设置1)当0.5056s时发生三相短路,电流波形如下图所示:图1.6 三相短路电流波形2)当0.8065s时发生三相短路,电流波形如下图所示:图1.7 三相短路电流波形1.2.3 Xd、Xd`、Xd``对短路电流的影响(1) Xd不同的影响同步发电机的三相短路研究模型中Xd的参数设置如下图所示:图1.8 Xd的参数设置仿真波形如下图所示:图1.9 三相短路电流波形同步发电机的三相短路研究模型中Xd的参数设置如下图所示:图1.10 Xd的参数设置Xd=10.14时,仿真波形如下图所示图1.11 三相短路电流波形(2)Xd`的影响同步发电机的三相短路研究模型中Xd’的参数设置如下图所示:图1.12 Xd的参数设置Xd’=0.314时三相短路电流的波形如下图所示:图1.13 三相短路电流波形同步发电机的三相短路研究模型中Xd’的参数设置如下图所示:图1.14 Xd’的参数设置Xd’=1.01时,三相短路电流的波形如下图所示:图1.15 三相短路电流波形(3)Xd’’的影响同步发电机的三相短路研究模型中Xd’’的参数设置如下图所示:图1.16 Xd’’的参数设置Xd’’=10.14时,仿真波形如下图所示:图1.17 三相短路电流波形同步发电机的三相短路研究模型中Xd’’的参数设置如下图所示:图1.18 Xd’’的参数设置Xd’’=0.9时三相短路电流的波形如下图所示:图1.19 三相短路电流波形1.2.4衰减时间常数Td’、Td’’的影响(1)不同Td’时A相短路电流暂态交流分量衰减速度。
系统仿真大作业指导老师:___________ 屈胜利班级:学号:系统仿真大作业姓名:系统仿真上机作业一、计算机辅助系统分析:系统如下图所示:其中r 是单位阶跃,G 是非线性器件,G (s )= _________ Kj^s ) _________s(10s 1)(0.625s 1)(0.025s 1)1. 当G N = 1、 K = 40 时,用MATLAB 画出开环Bode 图,求出3 c 、6 B 。
由其估计出 t r 、 t s 、(T % 。
解:matlab 程序如下:zbvll .m 工 | 41 - c1 ear2 — ruiio= £0 0 0 40 402 ;3 -出的1=匚011\”仁 1 0], [10 1]):4 - den2=canv([0-625 l]a [0. 025 1J):□ - d^n= conv (d«nl, dsn.2) 6 - bode den) 7 -grid on;Q — K label f Frequency rad/s* 5 'fontsize h a 10)8 - t itle(' Bode Diacran G<s |:=4O (l+s)/s (10s+l) (0* 62&sH )(0. 025s+l)?).0 -phase, v2-bod.e (num, den':1 -[Gm :- Pm, '^cg, Wcp^ =narfin(nag, phase, w)u5----- ►-270103(HP)昌n -F ff乏(Bmp)0J苗Erd运行结果如下:■» ztai仿真波形如下:den =O.lo63 6^156 10. S D OOLflOOOGm 二4.321410. 01S5Vcp =2. 3973由上图知:den =[ 0.1563,6.5156 ,10.6500 ,1.0000 ,0]增益裕量Gm = 4.3168 穿越频率Wcg= 5.1598 所以得到:3 c =5.1598相位裕量Pm = 10.0158 增益为0的频率Wcp=2.3975e B =10.0158System, sysFrequency (rad/s) 5 04 Magnitude (dB): -12.3System: sysFrequericy (rad/s). 2.43Magn itude (dB). -0 2OS5W ] 10°101 103FreqLFertcy rad/s (rad/s)5 80 5 2其相应的闭环传递函数为 G3(s)=10s A 2+s+40, 此二阶系统可求出相应的 =0.025,Wi =2所以可以估计出:t r =—=0-80s (其中 严,现 18.67s/%=—=92.44%,matlab 程序:svs=t £ 'rnnrn , den)sys= feedback < sys . 1): *y, t'=step(ays ■: ytr-find(y>-l): rise_Tinie=T (ytr (1)) 二r 禺 tpZ-DlK (丁), peak_tine=t(tp);max. OA'ershaot =ymsx- L s-Length<t);whi1& y(s)>0. 98&y<s)<1.02s-s-1:endsettJing_tLme=t (s)运行结果为:求解 t r 、 t s 、(T %:由bode 图:可将系统的开环传递函数化成G(s)二40s (10s 1)0, 7772a ax_ ctvei sho ot =0.81^0settling_t itne ■17.09S5所以得到:t r=0.7772s t s=17.0985s 彷% =81.68%经检验:由bode图估算出tr,彷% ,ts的结果与正确值的差距不大2•当G N1,K 40时,用MATLAB画出根轨迹图,并求出K 40时的闭环极点;由其估计出t r、t s、c %解:matlab程序为:»nun=:0 0 0 40 40:: denl=conv{Z1 0], [10 1]): den2=conv([0< 625 1J »L0.02b 1]): de n= c cm- (den,l, (icn2);sys-tf(num, den): ?P,z^=pzmap(sys]ri ocus(sys)运行结果:-40.oooa一1・ GOOD-0.1000求系统闭环零极点matlab程序:100>> sys=f eedi ack(sys, 1):1sys ■运行结果:-40.1616 + 0. OOOOi -0.2274 十 2.41461 -0.2274 - 2.41461 -1.0837 + 0. OOOOi仿真图:Root LocusSystem: sysGain: 0Pole: -40 Damping. 1 Overshoot (%): 0Frequency (rad^s): 40-100 -50 0 50Real Axis (secondls 1)OO00 00 aoa5 o 1 1 - 1■i (jsp 亡QoQln)卫 xy AJEW5EE-I-5( -Root Lot SysM sys,Gain : 4 fi?e-D5Pole, ^o osai Damping: 1 Overstool (%): 0Frequency (rad/s). 0 0901-1 -0.& -0.6 -0 4 -0.2 0Real Axis (seconds1)由上图:闭环系统的所有极点为-40 , -0.2274+ 2.4146j,-0.2274-2.4146j, -1.083,闭环系统的零点为-1。
大连理工大学本科实验报告课程名称:电子系统仿真实验学院(系):专业:班级:学号:学生姓名:2011 年月日一、实验目的和要求本实验通过Multisim仿真软件对选频放大网络进行仿真,加深对选频放大网络的理解。
实验要求输入正弦信号,输出也为正弦信号。
当改变输入信号频率时,输出信号的大小也会随之改变,当输入信号频率与负载网络的振荡频率相等,输出信号达到最大。
二、实验原理和内容本实验中的负载网络采取LC并联回路,由并联电抗X=1/(wC-1/wL)知,当输入信号的频率不同时,LC回路将呈现不同的电抗,当输入信号频率与LC振荡频率相等时,此时并联回路呈现的阻抗将到达最大。
本实验过程中只改变输入信号的频率,而不改变幅值,同时电路中的其他参数不改变,根据三极管的动态特性曲线可是此时输出电流i8将保持不变,当信号频率不同时,此时并联回路呈现的负载大小将不同,则输出电压V8大小也将不同,此时电压放大倍数也不一样。
三、主要仪器设备使用mulitsim10.0版本四、实验步骤及操作方法选频放大电路图所用器件参数一览表该试验中主要运用了以下种方法1、直流工作点分析2、瞬态分析3、交流分析对于直流工作点分析,输出选项选择了V3,V8,V10,其他为默认。
对于瞬态分析,输出选项选择V8,起始时间为0,终止时间为0.00001s,其他选项为默认。
对于交流分析,输出选项选择V8,初期开始频率为1MHZ,停止频率为100MHZ,其他选项为默认,大概确定好振荡频率之后将开始频率设定为7MHZ,停止频率选择为15MHZ,sweep type选择Linear,其他设定为默认。
五、实验数据记录和处理六、实验结果与分析以下三个数据为直流工作点相应的值以下为瞬态分析过程中所截取的一段波形图。
以下为交流分析过程中所截取的一段波形图。
讨论、建议、质疑。
说 明大家所做大作业是本门课程成绩评定的依据,将来是要存档、检查的,需认真完成。
一经发现有相互抄袭现象,取消大作业成绩!一、所提交大作业要有封面,其上标注有:课程名称、第几次大作业、专业班级、姓名、学号等。
二、对问题的求解方法、过程要求有详细说明,有程序时需列出程序清单,程序求解结果。
(有问题可答疑)以下问题可设计MATLAB 程序进行求解。
题目一、电动机通过弹性轴联接惯性负载,以电动机输出力矩T m 为激励,负载转角θL 为响应。
已知235L J kg m =⋅,220m J kg m =⋅,15/k kN m rad =⋅,1.5/m c kN m s rad =⋅⋅。
对所给系统进行动力学分析(参考课件的实例分析),求解以下问题:(1)确定系统输入、输出量,选取系统状态变量,列出系统的状态空间表达式(包括状态方程和输出方程);(2)求系统的特征值,判断系统稳定性、能控性、能观性;(3)求系统输入-输出间的传递函数;(4)求系统输入-输出间的频响函数(绘制出伯德图);(5)求系统在单位阶跃输入时,状态变量和输出变量的时域响应(绘制出响应图线);(6)求系统在方波信号(自行产生一方波信号数据作为输入)输入激励下的响应,绘制出状态变量和输出变量的时域响应图线。
题目二、油井钻井平台与钻孔机模型。
钻井平台向钻孔机提供驱动力矩,带动钻轴转动,钻头受被钻物体的接触力矩。
以力矩τ2为输入(驱动),以转角θ2为输出响应。
已知2130J kg m =⋅,2220J kg m =⋅,15/k kN m rad =⋅,1 1.8/c kN m s rad =⋅⋅,22/c kN m s rad =⋅⋅。
对所给系统进行动力学分析(参考课件的实例分析),求解以下问题:(1)确定系统输入、输出量,选取系统状态变量,列出系统的状态空间表达式(包括状态方程和输出方程);(2)求系统的特征值,判断系统稳定性、能控性、能观性;(3)求系统输入-输出间的传递函数;(4)求系统输入-输出间的频响函数(绘制出伯德图);(5)求系统在单位阶跃输入时,状态变量和输出变量的时域响应(绘制出响应图线);(6)求系统在方波信号(自行产生一方波信号数据作为输入)输入激励下的响应,绘制出状态变量和输出变量的时域响应图线。
课题名称:通信系统仿真大作业院(系):专业:班级:学生姓名:学号:指导教师:职称:讲师2012年6 月2 日设计一随机信号分析1.已知瑞利分布随机信号的概率密度函数为⎪⎩⎪⎨⎧<≥-=0 x 0 0 )2exp()(222x x x x f σσ 用randn 函数产生22=σ的瑞利分布随机变量。
提示:两个独立分布、均值为0、方差为2σ的高斯随机变量的平方和开根号所得的随机变量服从功率为22σ的瑞利分布。
代码segma=sqrt(2);s=segma.^2;x=0::10;f=x./s.*exp(-x.^2/2*s);plot(x,f);axis([0,10,0,1]);title('瑞利分布');xlabel('随机变量x');ylabel('概率分布函数f(x)');grid on;var=(2-pi/2)*s;y=sqrt(var)*randn(5)结果y =设计二模拟信号的数字化7.设输入信号抽样值为-350个量化单位,按照A律13折线特性编成8位码。
代码x=-350;if x>0out(1)=1;elseout(1)=0;endif abs(x)>=0 & abs(x)<16out(2)=0;out(3)=0;out(4)=0;step=1;st=0;elseif 16<=abs(x) & abs(x)<32out(2)=0;out(3)=0;out(4)=1;step=1;st=16;elseif 32<=abs(x) & abs(x)<64out(2)=0;out(3)=1;out(4)=0;step=2;st=32;elseif 64<=abs(x) & abs(x)<128out(2)=0;out(3)=1;out(4)=1;step=4;st=64;elseif 128<=abs(x) & abs(x)<256out(2)=1;out(3)=0;out(4)=0;step=8;st=128;elseif 256<=abs(x) & abs(x)<512out(2)=1;out(3)=0;out(4)=1;step=16;st=256;elseif 512<=abs(x) & abs(x)<1024out(2)=1;out(3)=1;out(4)=0;step=32;st=512;elseif 1024<=abs(x) & abs(x)<2048out(2)=1;out(3)=1;out(4)=1;step=64;st=1024;elseout(2)=1;out(3)=1;out(4)=1;step=64;st=1024;endif abs(x)>=2048out(2:8)=[1 1 1 1 1 1 1];elsetmp=floor((abs(x)-st)/step);t=dec2bin(tmp,4)-48; %函数dec2bin输出的是ASICC字符串,48对应0out(5:8)=t(1:4);endout=reshape(out,1,8)结果out =0 1 0 1 0 1 0 1设计三数字基带传输系统6.根据单极性信号和双极性信号的误码率计算公式,作图比较两种信号的抗噪性能。
编程题(每小题25分,共100分)1. 典型二阶系统,其传递函数为,在相同坐标系下编程实现绘制当取0.1,02,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,2时候该系统的Bode图。
答:% MATLAB程序为*4Wn = 0.6kesai = [0.1:0.1:1,2] hold on;for kos=kesai num=Wn^2;den=[1,2*kos*Wn,Wn^2] step(num,den) endtitle('Step Response') hold off;2. 系统开环传函,设k=1,试编程实现(1)用传函、零极点、状态空间方式表示系统。
*10(2)绘制闭环系统单位阶跃响应。
判断稳定性。
(3)绘制根轨迹、Bode图、乃氏图。
(4)求可控性、可观测性矩阵,并判断可控、可观测性。
3. “虚拟飞行员”模型代表了闭环中的飞行员,它可以用来分析和设计飞机控制系统。
飞机和飞行员形成的闭环框图如图(3)所示。
变量表示飞行员的时延,用 =0.5表示反应较慢的飞行员,用 =0.25表示反应较快的飞行员。
飞行员模型的其他变量假定为K=1, 1=2, 2=0.5。
请用matlab编程计算闭环系统的极点。
图3 飞行员控制飞机的闭环系统4. 典型二阶系统,其传递函数为,在相同坐标系下编程实现绘制当,取2,4,6,8,10,12时候该系统的单位阶跃响应。
答:% MATLAB程序为ex3212.m:w=[2:2:12] kesai=0.7 hold on; for Wn=wnum=Wn^2;den=[1,2*kesai*Wn,Wn^2] step(num,den,6) endtitle('Step Response') hold off;。
系统仿真作业:观测站(O 点)为测得的某航班数据,当飞机到达某位置P 时开始对飞机的相关数据进行记录,在位置P 处时间t 记为0,当飞机到观测站的距离达到最短时飞机所处的位置记为M 点,飞机在t 时刻所处的位置与观测站O 点的连线到直线OM 的夹角记为θ(t)。
附表一给出了观测站某次记录数据:A 列为记录时间t ,其间隔为0.001s ;B 列为飞机飞行过程中t 时刻飞机相对于P 点的距离S(t);C 列给出了飞机t 时刻角度θ(t)的理论值theta_theory (参考输入),D 列给出了观测站实际上观测到的飞机在t 时刻时角度θ(t)的观测值theta_observation ;E 列给出了当把C 列数据theta_theory 作为某标准二阶伺服系统G(s)的输入信号时该标准二阶伺服系统的输出值theta_output 。
作业要求:(1) 将附表一中的数据导入matlab 工作空间,使各列数据都能作为变量使用。
(2) 试根据表格中的数据使用MATLAB 完成以下问题1. 根据A 、B 两列数据确定飞机飞行时的理论运行轨迹和飞机的飞行速度;2. 根据A 、B 、C 三列数据确定当飞机到达M 点时观测站O 到M 点的距离。
(3) 设计标准二阶伺服系统G(s)2n 222S nn ωζωω++=,要求: 1.确定合适的ζ值,其单位阶跃响应的性能指标满足:系统的超调量σ%介于4.5%~8.0%之间2.使用MATLAB 仿真确定参数ωn,使得:当把C 列数据theta_theory 作为该二阶伺服系统的输入时,系统的输出尽可能的接近E 列所给出的theta_output 。
求出系统传递函数参数。
3.将C 列theta_theory 作为设计好的标准二阶伺服系统的输入信号,计算输出相对于输入的相对误差;作出输出随时间变化的曲线,以及相对误差随时间变化的曲线。
(4) 在上述设计好的伺服系统中加入合适的干扰信号和适当的非线性环节,使得当把C列数据theta_theory 作为输入信号时系统的输出尽可能接近D 列数据(θ(t)的观测值theta_observatuon)。
2012-2013学年系统建模与仿真大作业(论文)要求1、期末大作业按分组方式进行,每组4-6人,自行组合。
2、要求学生自行选题,选题符合系统建模与仿真应用的领域,必须是现实的系统,现实中存在一定的问题,可以进行数据的采集、系统分析等。
需要撰写报告,做PPT进行开题答辩。
开题报告包括:题目、小组成员组成及分工、选题的目的及意义、国内外研究情况、研究的内容和方法、技术路线和预期结果、进度计划、所需条件及落实情况。
3、论文内容覆盖模拟系统的问题定义和目标、建模与模拟、模拟分析和分析报告等几部分。
4、论文规范格式要求:论文由封面、中文摘要、关键词、正文、参考文献几个部分组成。
1)封面格式(1).标题:长度≤20字,1号楷体(2).专业姓名等:项目名称“3号楷体”,所填内容中文用“3号楷体”,2)摘要格式(1).置于目录页之前(2).摘要字数≤200字,(3).摘要正文为“小4号宋体”,35字/行,32行/页(4).中文摘要要有中文论文标题,上下各空一行,加在“摘要”之前,字体与“摘要”一样均为“3号黑体”(5).中文摘要中,关键词为3~5个,另起一行;“关键词”应为黑体,关键词之间分隔符应为全角“;”3)目录(1)标题为“3号黑体”,上下各空一行;(2)“前言、摘要”为“小4号黑体”,“Abstarct”为“小4号Times New Roman”;(3)每章标题为“4号黑体”,每节标题为“4号宋体”且缩进;(4)目录需带“致谢、参考文献、附录”等项目4)正文格式(1).一级标题为“3号黑体”,上下各空一行(2).二级标题为“小3号黑体”,前后空12磅(3).三级标题为“4号黑体”,前空6磅(4).章节标题中数字和英文为“Times New Roman”(5).中文正文为“小4号宋体”,35字/行,32行/页(6).英文正文为“小4号Times New Roman”(7).正文中参考文献按出现顺序从[1]开始依次编号(8).图表编号中中文为“5号黑体”,数字和英文为“Times New Roman”(9).图表中文字比正文小一号字体,例如,正文为小4号,则图表中文字为5号(10).公式编号格式为“………………(编号)”,较长公式换行居中横排(11).正文中各种量、单位和符号必须遵守公制及国家标准5)参考文献格式(1).书籍:[编号]作者(3人以内全部写上,3人以上只写3人再加“等”).书名.版本(第几版).出版地:出版社,出版年(2).期刊:[编号]作者(3人以内全部写上,3人以上只写3人再加“等或etal”).文章名称.期刊名称,年号,卷号(期号):起页-止页(3).网页:[编号]网页地址,摘抄年月5、论文的基本要求1)标题:反映需要解决的问题,一般不超过20个字;2)摘要:其摘要所撰写内容大体如下:(1)本课题研究范围,目的以及在该学科中所占的位置。
《控制系统仿真》大作业一、基本操作程序实现:1、自己定义一组数据,并将其保存到文件data.dat 。
要求第一列为时间t (t 为等差数列,2000≤≤t );第二列为与t 对应的201个幅值数据,作为信号)(1t f 的幅值;第三列为按s 的降幂排列的传递函数分子系数;第四列为按s 的降幂排列的分母系数。
第三列、第四列的数据个数不能超过5个。
2、读入data.dat 数据, 画出)(1t f 的时域波形。
3、⎪⎩⎪⎨⎧-<≤≤<≤=其它且)3(15)(10010)(100)(*2)(112112t f t f t t f t t f t f求取)(2t f ,将结果保存到result.mat 文件,画出其时域波形。
4、按data.dat 中的第三列、第四列,求取其对应的传递函数,绘制其bode 图。
报告要求:简述程序的实现过程。
二、子系统封装程序要求:1、 用SIMULINK 建立系统:c bx ax y ++=3,x 为输入,y 为输出,c b a ,,为常数。
对该系统进行封装,要求通过对话框能修改c b a ,,的值。
2、 若输入x 为幅度为5、频率为0.25Hz 的锯齿波,采用示波器显示输出y 及输入x 的波形。
3、 将输入x 、输出y ,导入到工作空间,并采用plot 命令,将两个波形在同一波形窗口显示,带网格线、图例。
报告要求:用文字阐述上述程序的实现过程。
三、PID 控制器参数整定 某控制系统的开环传递函数为11010)(230+++=s s s s G ,采用单位负反馈。
程序要求:1、试采用工程整定法,设置合适的P 、PI 、PID 控制器的参数。
2、将仿真时间定为300秒,绘制整定后的系统的单位阶跃响应曲线。
3、设计M 文件,采用编程法求取系统阶跃响应性能指标:超调量、调节时间。
报告要求:1、阐述该题目的PID 参数整定过程。
2、阐述超调量、调节时间的求取过程。