仿真作业说明
- 格式:doc
- 大小:284.00 KB
- 文档页数:5
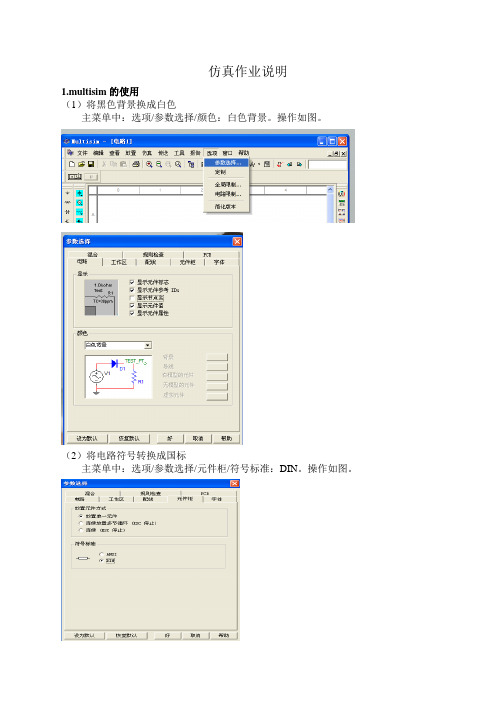
仿真作业说明1.multisim的使用(1)将黑色背景换成白色主菜单中:选项/参数选择/颜色:白色背景。
操作如图。
(2)将电路符号转换成国标主菜单中:选项/参数选择/元件柜/符号标准:DIN。
操作如图。
(3)取元件元件库如图所示,其中绿色底为理想元件库(元件参数可更改),灰色底为实际元件库(参数与生产厂家相同,不可更改)。
单击图标即可打开相应的库,选中欲用元件点击后移动鼠标,在工作区适当位置点击鼠标即可放置该元件。
(4)元件参数修改双击该元件,即可弹出属性框,电阻元件属性框如图所示。
输入修改的阻值,并可点击右边上下箭头改变其单位(默认为kΩ)。
(5)元件的移动与旋转、连接元器件的移动:将鼠标移到元器件上,按住左键,可将元器件拖曳到所需的位置。
元器件的旋转:用鼠标右键单击元器件,弹出一个元器件操作对话框。
选择适当命令,可使元器件左右翻转、上下翻转、顺时针旋转90°或逆时针旋转90°。
元器件的连接:先将鼠标指向某个元器件的一个端点,鼠标指针消失,在元器件端点处出现一个带十字花的小园黑点。
再单击鼠标左键,移到鼠标,会引出一条黑色的直线或折线,将鼠标拉向另一元件的一个端点,并使其出现一个小园红点,然后单击鼠标左键,黑线变红线,实现这两个元件间的有效连接。
(6)运行仿真为仿真运行按钮,按下“1”为运行,“0”为停止。
(1)为方便起见,元件尽量从理想元件库中调用。
(2)元件调用电压源、地(每个电路必须设有地才可运行软件)从电源库调用;电流源从信号源库调用;电阻从基本元件库调用;电压表、电流表从指示元件库调用;万用板从测量仪表库调用;(3)使用multisim仿真功能分析各结点电位的方法主菜单中:选项/仿真/分析/直流工作点分析。
操作如图。
DC工作点分析对话框如图所示:输出变量用于选定需要分析的节点。
左边“电路变量”内列出电路中各节点电压变量和流过电源的电流变量。
右边“为了分析选择变量”栏用于存放需要分析的节点。
arena仿真案例作业Arena是一种仿真软件,用于模拟和分析复杂的系统。
它可以用于各种领域的仿真,如生产、物流、交通等。
本文将介绍一些使用Arena仿真的案例,以展示其在实际应用中的作用。
1. 生产线优化在一个制造工厂中,使用Arena仿真来优化生产线的布局和工序安排。
通过模拟不同的工艺流程和生产线配置,可以找到最佳的生产方案,以提高生产效率和减少生产成本。
2. 物流调度在一个物流中心中,使用Arena仿真来优化货物的调度和运输路线。
通过模拟不同的调度算法和路线规划策略,可以找到最优的货物分配方案,以提高物流效率和减少运输成本。
3. 供应链管理在一个供应链中,使用Arena仿真来优化供应商选择、库存管理和订单处理等环节。
通过模拟不同的供应链策略和管理方法,可以找到最佳的供应链配置方案,以提高供应链的可靠性和响应能力。
4. 客流分析在一个交通枢纽中,使用Arena仿真来分析客流量和人员流动。
通过模拟不同的交通规划和站点布局,可以找到最佳的交通方案,以提高交通效率和减少拥堵情况。
5. 医院排队在一个医院中,使用Arena仿真来优化患者的排队和就诊流程。
通过模拟不同的排队算法和就诊规则,可以找到最佳的医疗服务方案,以提高就诊效率和患者满意度。
6. 电力系统在一个电力系统中,使用Arena仿真来优化电力的调度和供应。
通过模拟不同的电力调度策略和供应方案,可以找到最佳的电力运营方案,以提高电力供应的可靠性和效率。
7. 金融风险管理在一个金融机构中,使用Arena仿真来分析和管理风险。
通过模拟不同的风险事件和投资策略,可以评估风险暴露和损失潜力,以制定最佳的风险管理方案。
8. 零售店铺布局在一个零售店铺中,使用Arena仿真来优化商品陈列和店员安排。
通过模拟不同的陈列方案和人员调度策略,可以找到最佳的店铺布局方案,以提高销售额和客户满意度。
9. 城市规划在一个城市中,使用Arena仿真来分析人口流动和资源分配。

《仿真环境下的机器人》作业设计方案(第一课时)一、作业目标本节课的作业旨在帮助学生掌握仿真环境下的机器人操作,了解机器人的基本原理,并通过实践操作提高他们的动手能力和解决问题的能力。
二、作业内容1. 操作机器人进行简单的移动、旋转和缩放操作,熟悉仿真环境下的操作界面。
2. 尝试使用不同的工具对机器人进行修改和调整,观察其行为变化。
3. 结合教材中的案例,尝试编写简单的机器人程序,实现预设的功能。
4. 在完成上述任务后,完成一份关于机器人操作的经验总结报告。
三、作业要求1. 作业完成后,需在班级群里分享截图或视频记录,展示自己的操作成果。
2. 鼓励学生在操作过程中遇到问题时,积极寻求同学和老师的帮助,共同探讨解决方案。
3. 提交经验总结报告时,需阐述自己在机器人操作过程中的心得体会,以及可以改进的地方。
四、作业评价1. 评价标准:机器人操作过程的流畅性、准确性,以及程序编写的规范性和逻辑性。
2. 评价方式:教师根据学生提交的作业进行评分,同时针对学生在操作过程中出现的问题进行反馈和指导。
五、作业反馈1. 鼓励学生主动寻求反馈,特别是对机器人操作过程中的困惑和问题,积极与老师和同学交流,共同探讨解决方案。
2. 作业反馈应在下一节课上进行,教师将针对学生作业中出现的普遍问题和个别问题进行讲解和指导。
通过本节课的作业,学生不仅能够掌握仿真环境下的机器人操作技能,还能在实践中提高自己的动手能力和解决问题的能力。
同时,通过经验总结报告的撰写,学生可以更好地总结自己的学习成果,为后续的学习打下坚实的基础。
此外,教师也应该根据学生的作业情况,及时调整教学策略,加强对学生学习过程中的指导和帮助,确保学生能够更好地掌握知识和技能。
同时,教师也应该关注学生的反馈,及时调整和改进教学方法和手段,提高教学质量和效果。
作业设计方案(第二课时)一、作业目标通过本次作业,学生将进一步掌握在仿真环境下的机器人编程技巧,提高机器人运行效率和问题解决能力。

《系统建模与仿真》课程作业要求鉴于本重修课程上课对象主要为工业工程毕业班的同学,很多同学在企业进行实习,上课学生太少,因此后续课堂授课不再进行,而改由同学们自学。
自学参考资料主要有:(1)课程讲义(需要到曹旭东处去拿底稿进行复印)及其模型(在上下载);(2)WITNESS软件操作指南,下载链接:/s/1gd43COV。
课程作业相关说明:(1)课程最终考核依据:为提交报告(和模型)+前期出席情况。
(2)提交截止时间:2014-5-23(3)提交方式:纸质打印报告一份(交由曹旭东同一收齐后,在截止时间之前联系并交给我),报告(和模型,若有)电子档发送至jiannywang@ (4)报告要求:文档结构和排版参考毕业论文的格式(5)课程作业题型(一)(A类课题)根据课程讲义独立章节的模型进行流程扩展或条件变更,进行模型的设计、仿真结果的统计分析和改善设计,并最终形成仿真设计分析报告。
(二)(B类课题)根据实习企业的生产、物流或供应链系统、也可以是服务系统,选择系统中相对独立的部分(子系统)进行系统仿真方案设计,需要包括:(i)系统现状分析,主要是描述清楚系统运作过程相关的内容,可能包括系统设施布局、组成要素(机器设备、仓库、车辆、人员、订单等)、组成要素的运作流程和数据(加工时间、运输时间、订单量等)、存在的问题(例如:设备利用率不高、系统库存过高、订单满足率过低等),以及其他相关内容。
(ii)仿真目标和可行方案,主要说明该系统进行仿真可能达成的目标,以及为了达成该目标可能采取的方案(这些方案的效果需要通过仿真方能够进行评价,在报告中可以通过其他方法进行这些方案效果进行简要分析)。
(三)(C类课题)系统建模与仿真研究报告,主要是进行系统建模与仿真研究文献综述,或系统建模与仿真的实际应用介绍等。
注:(1)三类题型优劣排序为A—〉B—〉C(2)报告成文不少于8页;(3)报告格式排版需要工整清楚,图表清晰;(4)报告需要封面页:写上课程名称、课题名称、姓名、班级、学号、日期等。
机器人仿真与控制作业指导书一、实验目的本实验旨在通过机器人仿真与控制,让学生掌握机器人控制的基本原理和操作技能,培养学生对机器人控制的兴趣和创新能力。
二、实验器材1. 仿真软件:例如V-REP(Virtual Robot Experimentation Platform)2. 机器人模型:在仿真软件中选择合适的机器人模型,如KUKA机械臂。
3. 计算机:用于运行仿真软件。
三、实验内容本次实验主要包括以下内容:1. 机器人建模与环境搭建首先,在仿真软件中选择合适的机器人模型,例如KUKA机械臂。
然后,根据实际需求,搭建机器人的工作环境,包括工作台、传感器等。
2. 机器人运动学建模根据所选机器人的结构和参数,进行机器人的正运动学和逆运动学建模。
正运动学用于根据机器人的关节角度计算末端执行器的位姿,逆运动学则用于根据末端执行器的位姿计算关节角度。
3. 控制算法设计结合实验要求,设计合适的控制算法来实现机器人的自主控制。
常用的控制算法包括PID控制、模糊控制和神经网络控制等。
4. 仿真与控制实验将控制算法应用于机器人模型,在仿真软件中进行仿真实验。
通过观察和分析仿真结果,评估控制算法的性能,并进行实验参数的优化和调整。
四、实验步骤1. 打开仿真软件,并选择合适的机器人模型。
2. 在仿真软件中建立机器人的工作环境,包括工作台和传感器等。
3. 进行机器人的运动学建模,计算机器人的正逆运动学关系。
4. 根据实验要求,设计合适的控制算法。
5. 将控制算法应用于机器人模型,并进行仿真实验。
6. 根据仿真结果,分析控制算法的性能,并进行参数优化。
7. 记录实验过程和结果,撰写实验报告。
五、实验注意事项1. 在进行仿真实验前,仔细阅读仿真软件的使用说明,熟悉软件的基本操作。
2. 在进行机器人运动学建模时,注意选择合适的坐标系和运动学参数。
3. 设计控制算法时,考虑实际应用需求,并合理选择合适的控制策略。
4. 在进行仿真实验时,及时记录和分析实验结果,不断优化控制算法。

题目特别说明:以下所有题目中各进口道流量自行设置,机动车车辆构成、机动车期望速度、非机动车期望速度和行人期望速度如无特殊说明自行设置。
仿真时长均为3600秒。
机动车车道宽度均为3.5米。
1、图1中交叉口1和交叉口2均为信号控制交叉口,信号配时方案相同,信号周期均为120秒,各相位的黄灯时间均为3秒,东西向直行为第一相位(绿灯时间35秒)东西向左转为第二相位(绿灯时间为19秒),南北向左转为第三相位(绿灯时间为38秒),南北向左转为第四相位(16秒)。
对图1中交叉口1和交叉口2由东向西方向进行干线信号协调,并通过仿真计算出最佳相位差,分别给出相位差为0和最佳相位差下所有车辆在仿真时间段内的平均延误。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向四车道双向六车道交叉口1 交叉口2图12、图2中交叉口1和交叉口2均为信号控制交叉口,信号配时方案相同,信号周期均为120秒,各相位的黄灯时间均为3秒,东西向直行为第一相位(绿灯时间35秒)东西向左转为第二相位(绿灯时间为19秒),南北向左转为第三相位(绿灯时间为38秒),南北向左转为第四相位(16秒)。
对图1中由东向西方向进行公交仿真,要求包含两条公交线路,一条包含一个港湾式公交站点,另一条包行一个路边式站点和一个港湾式公交站点,站点位置自行设置。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向六车道双向四车道交叉口1交叉口2图23、 图3中交叉口1和交叉口2均为无信号控制交叉口,根据课件中无信号控制十字交叉口的让行规则进行仿真。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向四车道双向四车道交叉口1交叉口2主路 次路 次路 图34、 图4中交叉口1和交叉口2均为无信号控制交叉口,根据课件中无信号控制交叉口的让行规则进行仿真。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
【关键字】研究多级放大电路的参数研究陈宸F0803008 48一、实验名称多级缩小电路的参数研究二、本仿真实验的目的(1)学习搭建复杂电路的方法和利用Multisim辅助设计电子电路的方法。
(2)了解直接耦合多级缩小电路Q点的调试方法。
(3)学会测量UBEQ、UCEQ,并懂得如何计算出IEQ、ICQ、IBQ。
(4)学会如何计算晶体管缩小电路的输入电阻和电压缩小倍数。
(5)学会如何消除电路产生的自激振荡(在输入电压为零时输出为一定频率、一定幅值的正弦波)。
提示:在T4管基极与集电极之间加接一个小容量的电容(如10pF)消振。
(6)重点掌握多级缩小电路中各元器件参数的选择,进而使得电路输入电阻尽可能大、输出电阻竟尽可能小、电压缩小倍数尽可能大。
三、仿真电路XMM1 XMM2 XMM4XMM5 XMM6 XMM7图3.13 晶体管参数选择实验电路四、仿真内容在Multisim8环境下搭建图3.13所示电路,选择电路参数;并接入测试仪器,用万用表测量静态工作点,用示波器测量电压缩小倍数。
设Q1~Q5为T1~T5,其中NPN型晶体管采用实际晶体管2N2222A,其β=220;PNP型晶体管采用实际晶体管2N3702,其β=133.8。
选取VCC=12V,VEE=-9V。
电路参数的选择:为使电路的输入电阻大些,应使第一极的静态电流小些,设置TI和T2的发射极静态电流为250~300μA。
为使电流源电流稳定,取R1为12KΩ,T3基极对VEE电位为7V,因而取R3、R4分别为20KΩ、10KΩ。
IEQ=[R4*(VCC-VEE)/(R3+R4)-UBEQ]/2R1≈263μA第一极的集电极电阻R2可取5.1KΩ。
为使第一级电压缩小倍数数值大些,R5取值应小些,最后调整为499Ω。
为使第二级电压缩小倍数数值大些,R6取值应大些。
为使第三极最大不失真输出电压最大,T5发射极静态电位应约为1.5V;为使输出电流较大,第三极的静态电流不能太小。
模拟电子技术课程习题 2.19 multisim 仿真学号: 5080309224 姓名: 李有一、本仿真实验目的2.19 利用multisim 分析图P2.5所示电路中b R 、c R 和晶体管参数变化对Q 点、u A •、i R 、o R 和om U 的影响。
二、仿真电路晶体管采用虚拟晶体管,12VCC V =。
1、当5c R k =Ω, 510b R k =Ω和1b R M =Ω时电路图如下(图1):图 12、当510b R k =Ω,5c R k =Ω和10c R k =Ω时电路图如下(图2)图 23、当1b R M =Ω时, 5c R k =Ω和10c R k =Ω时的电路图如下(图3)图 34、当510b R k =Ω,5c R k =Ω时,β=80,和β=100时的电路图如下(图4)图 4三、仿真内容1. 当5c R k =Ω时,分别测量510b R k =Ω和1b R M =Ω时的CEQ U 和u A •。
由于输出电压很小,为1mV ,输出电压不失真,故可从万用表直流电压(为平均值)档读出静态管压降CEQ U 。
从示波器可读出输出电压的峰值。
2. 当510b R k =Ω时,分别测量5c R k =Ω和10c R k =Ω时的CEQ U 和u A •。
3. 当1b R M =Ω时,分别测量5c R k =Ω和10c R k =Ω时的CEQ U 和u A •。
4. 当510b R k =Ω,5c R k =Ω时,分别测量β=80,和β=100时的CEQ U 和u A •。
四、仿真结果1、当5c R k =Ω,510b R k =Ω和1b R M =Ω时的CEQ U 和u A •仿真结果如下表(表1 仿真数据)表格 1 仿真数据2、当510b R k =Ω时, 5c R k =Ω和10c R k =Ω时的CEQ U 和u A •仿真结果如下表(表2 仿真数据)表格 2 仿真数据3、当1b R M =Ω时, 5c R k =Ω和10c R k =Ω时的CEQ U 和u A •仿真结果如下表(表3 仿真数据)表格 3 仿真数据4、当510b R k =Ω,5c R k =Ω时,分别测量β=80,和β=100时的CEQ U 和u A •的仿真结果如下表(表4 仿真数据)。
实验作业土规1101班刘迈克 2011206200521计算机仿真1、(射击命中率) 在我方某前沿防守地域,敌人以一个炮排(含两门火炮)为单位对我方进行干扰和破坏.为躲避我方打击,敌方对其阵地进行了伪装并经常变换射击地点.经过长期观察发现,我方指挥所对敌方目标的指示有50%是准确的,而我方火力单位,在指示正确时,有1/3的射击效果能毁伤敌人一门火炮,有1/6的射击效果能全部消灭敌人.现模拟我方将要对敌人实施的20次打击结果,并确定有效射击的比率及毁伤敌方火炮的平均值。
解:一、问题分析首先是两种情况:(1)我方指挥所对敌方目标的指示正确与否。
有两种结果,每一种结果出现的概率都是1/2。
(2)指示正确时有三种结果:模拟试验有三种结果:毁伤一门火炮的可能性为1/3(即2/6),毁伤两门的可能性为1/6,没能毁伤敌火炮的可能性为1/2(即3/6).根据题意,20次打击可以认为有10次是目标准确的,且是随机的,可以生成(0,1)0.5,5/6),全部消灭敌人的范围是(5/6,1)二、程序:a=0;b=0;e1=0; %表示有效射击的比率e2=0; %表示毁伤敌人火炮的平均值r=rand(1,10);for i=1:10if r(i)<0.5n(i)=0;elseif r(i)>0.5&r(i)<5/6n(i)=1;a=a+1;elseif n(i)=2;b=b+1;end;end;rne1=(a+b)/20e2=(a+2b)/20三、结果及分析结果 r =Columns 1 through 80.4505 0.0838 0.2290 0.9133 0.1524 0.8258 0.5383 0.9961Columns 9 through 100.0782 0.4427n =0 0 0 2 0 1 1 2 0 0e1 =0.2000e2 =0.1000有效射击比率为e1=0.2,毁伤敌人火炮的平均值为0.1.十次击中的结果为0 0 0 2 0 1 1 2 0 0,20次打击的结果可以为2 0 1 0 0 0 2 0 1 0 0 0 0 0 0。
仿真作业说明
通信2班刘姗08120179
仿真分三部分,程序放在三个不同的文件夹,分别是:哈夫曼编码、QPSK和汉明(7,4)码。
下面对这三部分仿真作简单说明。
一、哈夫曼编码
实现对字符序列的哈夫曼编解码,并分析编码效率。
共有6个文件:
Seq.txt:样本文本,字符序列,包括字母、数字等可显示字符。
Main.m:主文件,对样本文件进行哈夫曼编码和解码,计算熵、平均长度和编码效率。
输出相关数据。
Probmodel.m:概率函数,计算样本文件中出现的所有互异字符和其对应的频率。
Huffanlyze.m:分析函数,基于字符和频率对样本文本进行分析,计算熵和平均长度,构造一个参考字典,每一条目包括三部分内容:字符,频率和哈夫曼码。
Huffencode.m:编码函数,根据字典对源字符序列进行编码,生成0、1序列。
Huffdecode.m:解码函数,根据字典对编码后的1、0序列进行解码,恢复成字符序列。
若Seq.txt中的内容是:ABCDEABBACCBCABCDEAA
运行结果如下图所示:
二、调制解调---QPSK
该部分实现了两部分内容,仿真调制解调系统和分析在AWGN信道下的信噪比-误码率关系。
共有4个文件:
Main.m:主文件,对输入的0、1码序列进行QPSK调制,在指定的信噪比下传输,采用最小均方误差准则进行判决。
比较输入和解码输出序列,绘出的曲线有输入信号时域波形和功率谱密度,信道输出信号时域波形和功率谱密度。
Performance.m:分析在AWGN信道下的信噪比-误码率关系。
绘出的曲线有仿真比特误码率、仿真符号误码率和理论比特误码率。
Pb_ps.m:误码率函数,在一定的信噪比下,计算10000个随机符号进行调制解调的比特误码率和符号误码率。
Gngs.m:高斯白噪声生成函数。
程序运行示意:
性能分析
三、信道编码---Hamming(7,4)
实现Hamming(7,4)的编码和译码及分析其在高斯白噪声信道下的信噪比--误码率关系。
共有4个m文件:
Hamecd.m:编码函数,实现对输入码流的(7,4)编码。
Hamdcd.m:译码函数,实现对输入码流的(7,4)译码。
Main.m:主文件,输入欲编码的码流,调用函数进行编码,加入随机错误后进行译码,比较得到的码流时候与输入的一致。
Performance.m:误码性能分析,在每比特信噪比0~12dB的范围内计算误码率,并于未编码比较,输出性能曲线。
Stdarray.m:构造Hamming(7,4)的标准阵列,程序中S是一个三维数组,16×7×8,即8组16×7的矩阵,表示16个许用码字和7种错误类型(7位中某一位出错)对应的有误码字。
一共128个码字,表示整个信道空间。
Hamming(7,4)可以纠正1个错误,通过构造标准阵列可以进行比照,将有误码字正确译码。
程序运行示意:
由图可见,在误码率为10-4的时候,编码增益约为12dB。