斜齿圆柱齿轮传动系统的耦合振动分析
- 格式:pdf
- 大小:251.80 KB
- 文档页数:4
齿轮故障的振动诊断及案例分析齿轮故障的振动诊断及案例分析振动案例齿轮传动的常见故障有齿断裂,齿磨损,齿面疲劳,点蚀( 剥落) 和齿轮安装不当。
由结构和工作时受力条件决定,齿轮传动的振动信号较为复杂,故障诊断需同时进行时域与频域分析。
齿轮工作过程中的故障信号频率基本表现为两部分,一为啮合频率及其谐波(高频部分) 构成的载波信号;二为低频成分的幅值和相位变化所构成的调制信号。
1、啮合频率及其谐波当轮齿进入或脱离啮合时,载荷和刚度均突然增大或减小,形成啮合冲击。
齿轮啮合频率为F m=f1·z1=f2·z2当齿轮出现故障时,将引起啮合频率及其各次谐波幅值的变化。
2、幅值调制和频率调制所构成的边频带(1)幅值调制,幅值调制相当于两个信号在时域上相乘,假定载波信号为 g(t ) 调制信号为e(t) 则调制后的时域总信号为X(t)=g(t)·e(t)将上式转换到频域上, 则为X(f)=g(f)·e(f)通常幅度调制的调制频率为旋转频率。
(2)频率调制,齿轮的转速波动,若载波信号为Asin(2∏f m t+Φ0),调制信号为βsin2∏f m t;频率调制可表示为X(t)=Asin[2∏f m t+βsin(2∏f r t)+ Φ0] 频率调制不仅产生围绕啮合频率f m的一族边频带,而且在相位信号中产生一个正弦波,通常频率调制的频率为分度不均匀齿轮的转频,实际上,齿轮故障中调幅与调频现象可能同时存在,因而在频谱上得到调幅与调频综合影响下形成的边频带。
3、由齿轮转频的低次谐波构成的附加脉冲齿轮的低频故障不平衡, 不对中等也会对齿轮振动时域波形产生影响,但不会在齿轮频率两侧产生边频带4、由齿轮加工误差形成的隐含成分该成分的振动通常由加工机床分度齿轮误差造成,它对齿轮的整体运行影响很小。
以下是一个齿轮故障的案例分析。
1、某采油平台原油外输泵 '螺杆泵) 传动齿轮局部断齿(1)设备形式及参数% 电机驱动直联双螺杆泵,螺杆之间以同步齿轮传动,齿轮齿数 Z=67,电机转速 ,n=995r/min(16.57HZ)(2)故障现象泵的非驱动端(同步齿轮安装在此侧) 振动速度值增加,图 1图2是时域波形及频谱图。
齿轮泵的振动分析及解决办法黄齐凯发表时间:2018-04-16T15:47:28.297Z 来源:《电力设备》2017年第31期作者:黄齐凯[导读] 摘要:主要介绍齿轮泵在日常的使用过程中常见的故障情况,并根据原因分析提出了解决办法。
为日常的生产维护提供了便利。
(天津蓝巢电力检修有限公司陕西黄陵项目部 300380)摘要:主要介绍齿轮泵在日常的使用过程中常见的故障情况,并根据原因分析提出了解决办法。
为日常的生产维护提供了便利。
关键词:齿轮泵振动故障分析1、齿轮泵的结构及工作原理齿轮泵主要应用于化工与工业等众多场合中,起到增压、计量、输送和抽吸流体的作用。
齿轮泵分为内啮合和外啮合两种结构,黄陵矿业2×300MW机组中风机油站用齿轮泵为KCB型,属于外啮合齿轮泵在火力发电厂中齿轮泵被应用在各大风机油站输送润滑介质。
齿轮泵在输送润滑介质的过程中是依靠泵缸与啮合齿轮间所形成的工作容积变化和移动来输送液体或使之增压的回转泵。
齿轮泵主要有主动齿轮、从动齿轮、泵体、泵盖、安全阀、轴端密封等组成。
泵体、泵盖和齿轮构成的空间就是齿轮泵的工作腔。
两个齿轮的轮轴分别装在泵两侧端盖上的轴承孔内,主动齿轮的轮轴一端伸出泵体,配以连轴器由电机驱动。
运转时由主动轴带动从动轴旋转,使油液从吸入口吸入,随着旋转当两个齿轮的轮齿逐渐分开时,吸入式的容积增大,压力降低,便将吸入口内的油液吸入泵体内,齿轮的不断旋转使吸入的油液不断的被挤往出油口,从而油液被排入油管路中。
泵体上装有安全阀起超载保护作用,安全阀的全回流压力为泵额定排除压力的1.5倍,当排出的压力超过规定压力时,输送液体可以自动顶开安全阀,使高压液体返回吸入口。
也可在允许排出压力范围内根据实际需要另外调整。
但注意本安全阀不能作减压阀的长期工作,需要时可在管路上另行安装。
KCB系列齿轮油泵的主传动齿轮是斜齿园柱齿轮,而我们现场的齿轮泵主传动齿轮是四个斜齿轮组成的人字形齿轮组全系列齿轮油泵是用三爪式弹性联轴器与电动机组成的热油泵机组。
基于ANSYS的减速器斜齿_直齿圆柱齿轮的模态分析_陈淑玲减速器是一种常见的传动装置,用于调节旋转速度和输出扭矩。
其中,斜齿和直齿圆柱齿轮是减速器中常见的传动元件。
为了提高减速器的可靠性和使用寿命,对其进行模态分析十分重要。
本文将基于ANSYS软件,对减速器中的斜齿和直齿圆柱齿轮进行模态分析,以评估其振动特性和在工作过程中的可靠性。
模态分析是结构动力学的一种分析方法,通过计算和分析结构体系的固有振动频率和模态形式,可以了解结构的振动特性、动力响应以及自由振动和迫振动下的振动形态等信息。
首先,我们需要准备减速器的结构模型。
利用CAD软件绘制减速器的斜齿和直齿圆柱齿轮的三维模型,并保存为.STEP或者.IGES等与ANSYS兼容的格式。
接下来,打开ANSYS软件,通过“Geometry”模块导入保存的减速器模型。
然后,根据需要设置几何尺寸、材料属性和约束条件等。
在完成几何和材料属性的设置后,选择“Modal”模块进行模态分析。
首先,选择减速器结构模型,并设置模态分析的参数,包括求解器类型、分析类型(自由振动或迫振动)、模态数目等。
在求解过程中,ANSYS会自动计算减速器的固有频率和振动模态形式。
通过分析得到的模态结果,可以了解减速器在不同频率下的振动形态和相应的振动模态。
最后,根据模态分析结果,可以评估减速器的振动特性,包括主频率、模态形式、振动幅值等。
如果存在与工作频率相接近的主频率,可能会导致共振现象,从而影响减速器的正常工作。
在设计和使用减速器时,需要根据模态分析结果合理地选择材料和结构参数,以提高减速器的可靠性和使用寿命。
综上所述,基于ANSYS的减速器斜齿和直齿圆柱齿轮的模态分析是评估减速器振动特性和可靠性的重要方法。
通过模态分析,可以了解减速器在不同频率下的振动形态和相应的振动模态,并根据分析结果合理地选择材料和结构参数,以提高减速器的可靠性和使用寿命。
齿轮与齿轮箱振动噪声机理分析及控制写在前面噪声是指发声体做无规则振动时发出的声音。
声音由物体的振动产生,以波的形式在一定的介质(如固体、液体、气体)中进行传播。
一、齿轮振动的实例1齿轮轮毂的振动齿轮传递扭矩首先从轴传至轮毂,由轮毂传递到轮齿,再由主动轮轮齿传递到被动轮轮毂和轴系。
在传递过程中,由于受到轴向激励力的作用,齿轮轮毂产生轴向振动。
另外,由于啮合力的作用,轮毂也会产生横向和沿周向的振动。
2轴承及轴承座的振动齿轮系统通过轴系安置于轴承及其轴承座上,由于齿轮本体的轴向和周向振动必引起轴承支承系统的振动,相反,外界干扰力(如螺旋桨的轴承力)也可能通过轴承传递给齿轮系统。
3齿轮箱的振动齿轮的振动由轴系传到齿轮箱,激励箱体振动,从而辐射出噪声。
另外,齿轮在箱内振动的辐射声激励箱体,使箱体形成二次辐射噪声,这类噪声大部在中低频范围内。
齿轮箱体本身的振动也直接产生辐射声。
4齿轮的振动在啮合过程中,轮齿先由一点接触而扩展到线接触,或一次实现线接触,使得接触力大小、方向改变,产生机械冲击振动,从而辐射出噪声。
这类噪声呈现高频冲击的形式,其典型的齿轮振动时程曲线示于图2。
轮齿啮合时不断变化的啮合力,既激发齿轮的强烈振动,即各个轮齿的响应很大,也激发了齿轮箱箱体较弱的振动。
通常认为齿轮产生噪声的主要原因是轮齿之间的相对位移。
这类噪声源产生的噪声可以用付氏变换法把噪声表示为稳定频率的分量的集合。
图1 齿轮啮合振动及噪声传播图2 齿轮振动时程曲线二、齿轮振动噪声产生的机理1齿轮啮合激励产生的噪声齿轮的轮齿在啮合时因传动误差产生交变力,在交变力作用下产生线性及扭转响应,使齿轮产生振动辐射出噪声。
这是一种主要的噪声源,接触力变化越大,则齿轮相应的振动响应越大。
另外,齿轮的周节差产生的由复杂的或调制频率及其倍频组成的噪声,含有重复的基频(轴频),频率很低。
由于周节差产生了不规则的脉冲序列。
这种脉冲序列包括了众多的频率成份,但还不能认为是宽带随机噪声。

(一) 直齿圆柱齿轮传动的扭转振动模型若忽略传动轴的扭转变形,只考虑齿轮副处的变形,则得到最简单的扭转振动模型,如图1所示。
其中r b1、r b2为主从动齿轮的基圆直径,k v 为齿轮副的综合啮合刚度,并且考虑齿轮副的啮合阻尼系数c v 以及齿廓误差e 的作用,主动轮上作用与转动方向相同的驱动力矩T 1,从动轮上作用与转动方向相反的阻力矩T 2图1 齿轮副的扭转振动模型啮合线上的综合变形δi 可写为:1122i b b i r r e δθθ=--(1)设重合度小于2,啮合齿对为i ,法向啮合力可以表示为:()()()11221122i vi i vi i vi b b i vi b b i i i iF F k c k r r e c r r e δδθθθθ⎡⎤==+=--+--⎣⎦∑∑∑ (2) 式中:i 为参与啮合的齿对序号,i =1,2;k vi 、c vi 为齿对i 在啮合点位置的综合啮合刚度和阻尼系数。
主、从动齿轮的力矩平衡方程为:12111222b b J T r F J T r F θθ=-=- (3)将(2)带入(1)中得到:()()()()111112211221222112211222b vi b b i vi b b i i b vi b b i vi b b i iJ r k r r e c r r e T J r k r r e c r r e T θθθθθθθθθθ⎡⎤+--+--=⎣⎦⎡⎤---+--=-⎣⎦∑∑ (4)由此式可看出,即使主动齿轮转速以及传动载荷恒定,由于时变综合刚度k v 的变化,也会使从动轮的转动出现波动,即造成齿轮的圆周振动。
为了方便讨论时变综合刚度k v 对振动方程(4)的影响,定义啮合线上两齿轮的相对位移x 为:1122b b x r r θθ=- (5)不考虑齿轮传动的效率,齿轮的静态啮合力为:12012b b T T F r r ==(6)将式(5)、(6)带入方程(4)中,则可将其简化为一元微分方程:e v v d m x c x k x F ++= (7)式中,m e 称为系统的当量质量:12222112e b b J J m J r J r =+ (8)激振力为:0d vi i vi i iiF F c ek e =++∑∑ (9)根据方程(9)可以将一对齿轮的振动视为单自由度系统的振动,如图2所示。

机械传动系统中的齿轮噪音与振动分析引言在现代工业生产中,机械传动系统扮演着重要的角色,用于将动力从一个装置传递到另一个装置。
然而,随着机械传动系统的运转,齿轮噪音与振动问题会逐渐显现。
这些问题不仅会降低机械系统的工作效率,还可能影响工作环境和操作员的健康。
因此,深入了解机械传动系统中的齿轮噪音与振动分析,对于改善机械系统的工作性能至关重要。
一、齿轮噪音的成因分析齿轮噪音是指机械传动装置中齿轮的运动过程中产生的声音。
其主要成因包括以下几个方面。
1.1 齿轮啮合不均匀齿轮啮合不均匀是产生噪音的主要原因之一。
这种不均匀可能由齿轮制造过程中的误差、齿轮磨损等因素引起。
当齿轮啮合不均匀时,会引起冲击载荷,导致噪音产生和振动增加。
1.2 齿轮渐开线误差齿轮的渐开线误差是指齿轮齿面曲线不完全符合正常渐开线的情况。
这种误差会导致齿轮在啮合过程中产生振动和噪音。
1.3 齿轮材料与硬度问题齿轮的材料和硬度也会对噪音产生影响。
如果齿轮材料的强度不足或硬度差异较大,就容易在啮合过程中产生振动和噪音。
二、齿轮振动的分析方法为了解决齿轮传动系统中的振动问题,需要采用适当的分析方法来评估和解决。
2.1 齿轮传动系统的模态分析模态分析是一种用于研究物体振动的方法。
在齿轮振动分析中,通过对齿轮系统进行模态分析,可以得到齿轮系统的固有频率和模态形态,进而评估系统的稳定性和预测系统的振动情况。
2.2 有限元分析有限元分析是一种应用广泛的结构分析方法。
在齿轮振动分析中,可以利用有限元分析来模拟齿轮系统的动态响应。
通过对齿轮系统进行有限元分析,可以预测系统的振动模式、频率响应和应力分布等信息,为振动问题的解决提供参考。
三、齿轮噪音与振动控制方法为了减少齿轮传动系统中的噪音与振动问题,可以采用以下控制方法。
3.1 齿轮润滑适当的齿轮润滑可以减少齿轮啮合过程中的摩擦和噪音。
选择合适的齿轮润滑剂,确保齿轮表面的润滑膜厚度,可以有效降低噪音的产生。
修形斜齿轮啮合线振动加速度数值分析和试验验证修形斜齿轮是一种特殊的齿轮传动形式,它广泛应用于重型机械设备中。
在传动过程中,齿轮的啮合产生了振动,这会对传动效率、噪声和寿命等方面产生不利影响。
因此,对修形斜齿轮啮合线振动加速度进行数值分析和试验验证是十分必要的。
首先进行数值分析。
利用有限元方法,建立修形斜齿轮的三维模型,并根据传动的要求,设定传动比和转速等参数。
通过分析齿轮的受力情况,计算出啮合线上的应力分布。
然后,利用ANSYS等软件对齿轮的振动特性进行模拟,得出修形斜齿轮啮合线振动加速度的数值结果。
接下来进行试验验证。
在实验中,采用模拟测试台架和高精度传感器等设备,对修形斜齿轮的振动加速度进行测试。
在测试过程中,根据前期的数值分析结果,调整测试的参数,如转速、传动比等,以得到更准确的数据。
通过对测试数据的分析,比对数值分析结果,可以评估数值模拟的准确性,进一步完善模拟算法。
最后,综合分析数值模拟和试验测试的结果,确定修形斜齿轮的振动特性,并提出优化建议。
例如,通过改变齿轮的材料、结构等优化齿轮的设计,减少齿轮的振动加速度,提高传动效率和使用寿命。
同时,对于齿轮的监测和维护也提出了有效的建议,以确保齿轮传动系统的长期稳定运行。
总之,对修形斜齿轮啮合线振动加速度进行数值分析和试验验证是非常必要的。
通过这些工作,可以有效评估齿轮传动的振动特性,提高设备的传动效率和寿命,同时为优化设计和维护提供有效的建议。
针对修形斜齿轮的啮合线振动加速度的数值分析和试验验证,需要收集相关数据并进行分析。
以下是一些常见的数据和分析方法:1. 齿轮的几何参数:包括模数、齿数、齿宽、齿面曲线等。
这些参数会影响到齿轮的受力情况和振动特性。
可以通过绘制齿轮的几何图形,计算出齿面曲率半径等参数,并进行优化设计。
2. 金属材料力学参数:包括弹性模量、泊松比、屈服强度等。
这些参数反映了齿轮材料的力学性质,直接影响到齿轮的受力情况和振动特性。
结合Solidworks和ANSYS的斜齿圆柱齿轮模态分析通过利用三维建模软件Solidworks对齿轮进行精确建模,然后将实体模型导入ANSYS有限元分析软件,并通过选择单元类型、定义材料模型、划分网格等一系列操作建立机构的有限元模型。
介绍了基于ANSYS的模态分析理论,通过加载条件,求解出固有频率,通过扩展模态,从而获得齿轮机构的5阶模态参数。
通过这样的分析研究,能够大大减少发生共振的可能,并且对于齿轮的优化设计和故障诊断提供了参考依据。
标签:ANSYS;齿轮;频率;模态分析引言在机械行业迅猛发展的当今,具有传动效率高、结构紧凑的齿轮机构显得尤为重要,并作为重要传动机构被应用于机械系统中。
在一些机械设备存在高速、震动的场合,如果不能有效的避开因为齿轮的固有频率而产生的共振,将会导致齿轮传动的噪声和震动,直接影响齿轮机构的疲劳寿命。
然而,在最初的齿轮设计阶段,想要获得准确的模态参数是非常困难的。
笔者通过ANSYS有限元方法,提取齿轮结构的模态参数。
在文章中,笔者通过三维建模软件Solidworks精确的建立了斜齿圆柱齿轮的三维实体模型,并利用ANSYS的强大分网功能进行网格划分,并进行模态分析。
1 有限元法的模态分析原理基于ANSYS的模态分析主要用于分析结构的振动特性,提取机械结构的模态参数,即机构的固有频率和主振型。
在受到外部激励作用的机械结构设计中,它们是重要的理论依据。
根据机械振动学和理论,建立的多自由度振动系统微分方程的一般形式为:2 基于Solidworks的齿轮三维模型的建立精确的三维实体模型的建立,有利于网格的精确划分。
Solidworks相比ANSYS有着较强的建立实体模型的能力,所以笔者选用solidworks作为三维建模的工具,建立实体模型。
建模参数分别为:齿数z=26,模数m=3,密度?籽=7.8×103kg/m3,泊松比?滋=0.3,弹性模量E=2.06×1011,偏转角?茁=10°。
4.8斜齿圆柱齿轮传动一.斜齿圆柱齿轮齿廓曲面的形成及啮合特点直线KK的轨迹-直齿轮的齿廓曲面啮合特点:沿齿宽同时进入或退出啮合。
突然加载或卸载,运动平稳性差,冲击、振动和噪音大。
斜直线KK的轨迹-斜齿轮的齿廓曲面→螺旋线渐开面βb-基圆柱上的螺旋角,两轮齿螺旋角方向相反。
啮合特点:接触线长度的变化:短→长→短,同时啮合轮齿对数多,重合度大,加载、卸载过程逐渐进行→传动平稳、冲击、振动和噪音较小,适宜高速、重载传动。
齿面接触线始终与K-K线平行并且位于两基圆的公切面内。
斜齿轮端面齿廓曲线为标准渐开线,相当于直齿圆柱齿轮传动,满足定传动比要求。
二.斜齿圆柱齿轮传动的几何参数和尺寸计算两个螺旋角:基圆柱螺旋角βb ,分度圆柱螺旋角β(基本参数) 斜齿圆柱齿轮与直齿圆柱齿轮的根本区别在螺旋角β>0,由此导致各截面上参数的不同。
β的取值:8-12°术语:端面―与轴线垂直的平面 法面―与轮齿垂直的平面βb 与分度圆柱螺旋角β的关系z P d tg πβ=,z bb P d tg πβ=两式相比:t bb dd tg tg αββcos == 或 t btg tg αββcos =t α― 端面压力角P t ―端面齿距,P n ―法面齿距βcos t n P P =,或 βcos /n t P P =齿距与模数的关系为:n n m P π=,t t m P π=故t m 与n m 的关系为:βcos t n m m =,或 βcos /n t m m =重要慨念:1.斜齿圆柱齿轮在端面上具有标准渐开线,故齿轮基本尺寸计算在端面上进行(d 、d f 、d a 、d b 、a )。
2.斜齿圆柱齿轮的加工,在垂直于法面上沿齿向进刀,故在法面上具有标准模数n m 、标准压力角n α、标准齿顶高系数*a h 和标准齿顶间隙系数*C 。
端面压力角和法面压力角的关系:βααcos /n t tg tg = (P180)分度圆直径:βcos /n t zm zm d ==法面上*a h 和*C 具有标准值,故:n a a m h h *=,n af m C h h )(**+=,n a f a m C h h h h )2(**+=+= d 、d f 、d a 、d b 的计算与直齿圆柱齿轮相同。
机械工程中齿轮传动系统的振动和噪声分析一、引言在机械工程中,齿轮传动系统被广泛应用于各种机械装置中,它具有传递动力和转速的重要作用。
然而,齿轮传动系统在运行过程中常常伴随着振动和噪声问题。
振动和噪声对机械系统的正常运行和人类健康都可能造成一定的影响。
因此,对于齿轮传动系统的振动和噪声进行详细的分析和研究显得尤为重要。
二、振动和噪声的来源及影响齿轮传动系统的振动和噪声主要来源于以下几个方面:1. 齿轮的制造误差:制造过程中存在的尺寸偏差、形状偏差等因素会导致齿轮的不平衡和不同频率的振动。
2. 齿轮啮合时的冲击和撞击:在齿轮啮合过程中,由于啮合面不完全匹配,会产生冲击和撞击,从而引起振动和噪声。
3. 齿轮轴承的摩擦和磨损:齿轮轴承的摩擦和磨损会导致齿轮传动系统产生振动和噪声。
振动和噪声对机械系统及人体有直接的影响。
首先,振动会导致齿轮系统的动态特性发生变化,降低工作效率和可靠性。
其次,振动还会引起噪声,对人体健康产生不良影响,如听力损害和工作环境的恶化。
三、齿轮传动系统的振动分析方法为了减少齿轮传动系统的振动和噪声,我们必须先了解其振动产生的机理。
振动主要包括自激振动和外激振动两种情况。
1. 自激振动:当齿轮传动系统本身的特性与外界激励相匹配时,会引发自激振动。
这种振动产生的频率通常是齿轮部件的固有频率。
2. 外激振动:当齿轮传动系统受到外部激励时,会引发外激振动。
这种激励可以来自于操作条件的变化、传动链中其他部件的振动以及传动系统载荷等。
为了进行齿轮传动系统的振动分析,可以采用数值模拟和实验测试相结合的方法。
数值模拟是利用有限元分析等方法对传动系统进行建模和仿真,从而得到不同工况下的振动特性。
实验测试则是通过安装传感器和数据采集设备,对传动系统的振动信号进行采集和分析。
四、齿轮传动系统的噪声控制方法在齿轮传动系统中,噪声的控制是减少其振动的重要手段。
以下是几种常见的噪声控制方法:1. 材料选择和制造工艺优化:选择高品质的齿轮材料,并采用精密的制造工艺,可以减少齿轮制造误差,从而降低系统的振动和噪声。
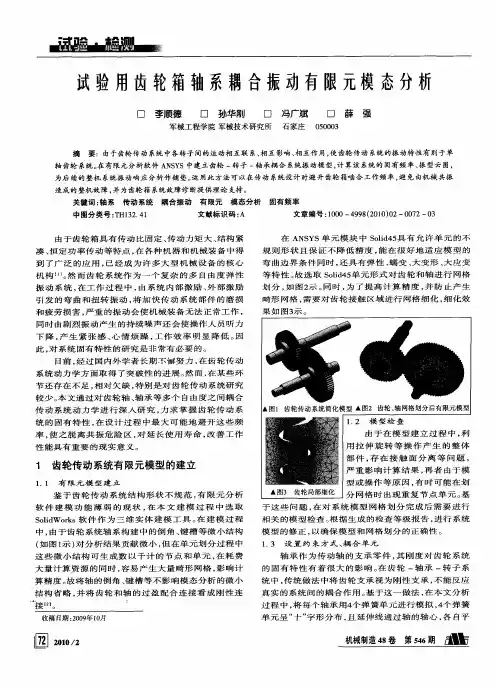
第30卷第9期2015年9月航空动力学报Journal of Aerospace PowerVol.30No.9Sep.2015文章编号:1000-8055(2015)09-2298-07 doi:10.13224/j.cnki.jasp.2015.09.032斜齿行星齿轮传动系统振动模式与动载特性林 何,王三民,董金城(西北工业大学机电学院,西安710072)摘 要:斜齿行星传动在高速重载场合中应用越来越广泛,其振动模式和动载特性研究对减振降噪设计具有重要意义.针对斜齿行星齿轮传动系统,建立了随动坐标系,推导了含陀螺效应的多自由度间隙非线性动力学方程,求解了系统的固有特性.结果表明:斜齿行星齿轮系统存在3种典型振动模式,即轴向平移-扭转耦合振动模式(重根数r=1),径向平移振动模式(重根数r=2)和行星轮振动模式(重根数r=N-3,N>3);综合考虑啮合刚度、齿侧间隙、综合误差和外载荷等激励作用,研究了啮合相位差和激励方式对动载系数的影响规律,结果表明计入啮合相位差时动载系数有所增大,当刚度波动系数ζ=1.723时,系统分岔为2周期次谐响应,随着激励参数的变化,内啮合较外啮合更快的进入混沌状态.关 键 词:随动坐标系;陀螺效应;动载系数;啮合相位差;外激励中图分类号:V233.1;TH113.1 文献标志码:A收稿日期:2014-02-27基金项目:国家高技术研究发展计划(2009AA04Z404)作者简介:林何(1985-),男,湖北襄阳人,博士生,主要从事齿轮系统动力学研究.Vibration mode and dynamical characteristics of helicalplanetary gear trainLIN He,WANG San-min,DONG Jin-cheng(School of Mechanical Engineering,Northwestern Polytechnical University,Xi’an 710072,China)Abstract:Helical planetary gear transmission was applied more extensively in high-speed and heavy load situations,as the vibration mode and dynamic characteristic had signifi-cant influence on vibration and noise reduction.Targeting the helical planetary gear trans-mission system,co-moving coordinate system was conducted,the multi-degree of freedomnonlinear dynamical equations including gyroscopic effect and backlash was derived,and thenatural characteristic of the system was solved.The results show that helical planetary geartrain has three typical vibration modes:axial translational-rotational coupled vibration mode(multiplicity r=1),translational vibration mode(multiplicity r=2)and planet vibrationmode(multiplicity r=N-3,N>3);in consideration of mesh stiffness,backlash,generalerrors and external load,influence laws of mesh phase difference and excitation ways to dy-namical coefficient have been studied,showing that mesh phase difference makes the dynami-cal coefficient increase;when stiffness fluctuation coefficientζ=1.723,the system is bifur-cated into 2-period sub-harmonic response,with the changes of excitation parameters,inter-nal engagement turning into the chaotic state is earlier than external engagement.Key words:co-moving coordinate system;gyroscopic effect;dynamical coefficient;mesh phase difference;external excitations 第9期林 何等:斜齿行星齿轮传动系统振动模式与动载特性 斜齿行星齿轮系统具有传动比大、平稳性好、结构紧凑、承载能力高等优点,在航空航天、汽车、船舶等领域中得到了广泛应用[1].为了改善其均载特性,提高其承载能力,国内外学者对行星齿轮系统的动力学特性都开展了许多有益的研究:杨通强、Parker和Eritenel等[2-4]分析了行星齿轮系统的固有特性;Ambarisha等[5]提出了通过控制啮合相位差来抑制系统的振动.相比直齿行星齿轮传动斜齿行星传动由于受力和结构复杂而考虑的自由度较多,且由于轴向分力引起激励,振动模式较为复杂,而传统的研究大多只对其固有特性进行了分析而对动载特性研究较少.为准确全面的分析斜齿行星齿轮系统的动力学特性,建立了行星架随动坐标系,并基于随动坐标系构建了平移-扭转耦合动力学模型,推导了含陀螺效应的多自由度运动微分方程,采用Runge-Kutta法求解了斜齿行星齿轮传动系统的固有特性和动载特性.1 动力学模型斜齿行星齿轮传动系统由太阳轮、行星架、内齿圈和N个行星轮组成.图1所示为含3个行星轮的斜齿行星齿轮系统动力学模型,各啮合齿轮副和弹性支撑处均含有阻尼,为保持模型简洁阻尼符号图中未标出.图中OXY为固定坐标系,原点在行星轮系的对称中心;Oxy为行星架随动坐标系,固连在行星架上随行星架的转动而运转;Onxnyn(n=1,2,3)为行星轮坐标系,随着行星架做等速旋转,其原点位于行星轮的几何中心位置.图1 斜齿行星齿轮系统平移-扭转耦合动力学模型Fig.1 Translational-torsional coupled dynamical modelof helical planetary gear train行星轮系传动中,行星轮在自转的同时围绕着太阳轮做圆周运动,为分析陀螺效应对系统振动的影响建立图2所示行星轮系随动坐标系,其中OXY为绝对参考坐标系,Oxy为随动坐标系,O为行星传动理论安装中心,ωc为随动角速度.图2 行星轮系随动坐标系Fig.2 Co-moving coordinate system of planetarygear train根据坐标变换理论知XY熿燀燄燅Z=cosωct-sinωct 0sinωct cosωct 00 0 熿燀燄燅1熿燀燄燅xyz(1) 随动坐标系下各矢量方向的加速度为¨x¨y¨熿燀燄燅z=cosωct sinωct 0-sinωct cosωct 00 0 熿燀燄燅1X··Y··Z熿燀燄燅··(2)式中{X··,Y··,Z··}T为绝对加速度矢量在固定坐标系中的分量.由式(1)、式(2)可得各行星轮in(n=1,2,3)在动坐标系中的质心运动加速度aix=¨xi-2ωc yi-ω2cxiaiy=¨yi+2ωc xi-ω2cy烅烄烆i(3) 图3为内、外啮合齿轮副集中质量动力学模型.斜齿行星齿轮传动系统的广义坐标取为:太阳轮、行星轮、内齿圈及行星架的扭转线位移珘ui=riφi,其中ri,φi分别为构件i的基圆半径和扭转角位移;以及在端面和轴向的平移线位移珘λi={xi,yi,zi}T(i=s,p,r,c),则系统动力学模型共含有12+4n个自由度,系统的广义坐标矢量为q={xs,ys,zs,us,xr,yr,zr,ur,xc,yc,zc,uc,x1,y1,z1,u1,…,xn,yn,zn,un}T 假设由太阳轮指向行星轮方向、行星轮指向内齿圈方向为啮合线正方向,考虑啮合线上的相对位移以及各广义坐标方向的叠加性,可得随动坐标系下含啮合误差的构件间相对位移如下:9922航 空 动 力 学 报第30卷图3 构件间的动力学模型Fig.3 Dynamical model between the componentsδsn=(us+un-xnsinα-xssinψsn-yncosα+ yscosψsn)cosβ+(zs-zn)sinβ-esn(t)δrn=(ur-un+xnsinα-xrsinψrn-yncosα+ yrcosψrn)cosβ+(zn-zr)sinβ-ern(t)δcnx=xc-ucsinψn-xncosψn+ynsinψnδcny=yc+uccosψn-xnsinψn-yncosψnδcnz=zc-znδcnu=uc-yn-xcsinψn+yccosψnδpnx=xn-xccosψn-ycsinψnδpny=yn-uc+xcsinψn-yccosψ烅烄烆n(4)式中δcnx,δcny,δcnz,δcnu分别为行星轮与行星架在xc,yc,zc,uc方向的相对位移;δpnx,δpny分别为行星轮与行星架在xn,yn方向的相对位移;esn(t),ern(t)分别为行星轮与太阳轮、内齿圈间的综合传动误差,且eij(t)=Eijsin(ωijt+φij).ωij为齿轮i与j的啮合齿频(i=s,r;j=n);ψsn,ψrn分别为行星轮与太阳轮、内齿圈在xc方向的夹角,其值为ψsn=2π(n-1)/N-α,ψrn=2π(n-1)/N+α.设齿轮副的侧隙为2b,则行星轮与太阳轮、内齿圈之间的法向啮合力为Fsn=kij(t)f(δsn,b)+csn δsnFrn=kij(t)f(δrn,b)+crn δr烅烄烆n(5)式中kij(t)=珔ka[1+ζsin(ωijt+φij)].其中珔ka,ζ分别为刚度均值和刚度波动系数;f(δsn,b),f(δrn,b)分别为行星轮与太阳轮、内齿圈间的间隙非线性函数.设构件j的质量为mj,转动惯量为Ij,阻尼为cj,刚度为kj,构件所受外力矩为Tj,行星轮个数为N.根据牛顿第二定律和质点系相对质心动量矩定理,采用集中参数法可建立系统各构件在广义坐标下的平衡方程.太阳轮的运动微分方程ms(¨xs-2ωc ys-ω2cxs)-∑Nn=1Fsncosβsinψsn+cs xs+ksxs=0ms(¨ys+2ωc xs-ω2cys)+∑Nn=1Fsncosβcosψsn+cs ys+ksys=0ms¨zs+∑Nn=1Fsnsinβ+csz zs+kszzs=0Isr2s¨us+∑Nn=1Fsncosβ+ksuus+csu us=Tsr烅烄烆s(6) 行星架的运动微分方程mc(¨xc-2ωc yc-ω2cxc)+∑Nn=1cp δcnx+∑Nn=1kpδcnx+cc xc+kcxc=0mc(¨yc+2ωc xc-ω2cyc)+∑Nn=1cp δcny+∑Nn=1kpδcny+cc yc+kcyc=0mc¨zc+∑Nn=1cpz δcnz+∑Nn=1kpzδcnz+ccz zc+kczzc=0Icr2c¨uc+∑Nn=1cp δcnu+∑Nn=1kpδcnu+ccu uc+kcuuc=-Tcr烅烄烆c(7) 行星轮的运动微分方程0032 第9期林 何等:斜齿行星齿轮传动系统振动模式与动载特性mn(¨xn-2ωc yn-ω2cxn)-Fsncosβsinα+Frncosβsinα+cp δpnx+kpδpnx=0mn(¨yn+2ωc xn-ω2cyn)-Fsncosβcosα-Frncosβcosα+cp δpny+kpδpny=0mn¨zn-Fsnsinβ+Frnsinβ-cpz δcnz-kpzδcnz=0(In/r2n)¨un+Fsncosβ-Frncosβ=烅烄烆0(8) 内齿圈的运动微分方程mr(¨xr-2ωc yr-ω2cxr)-∑Nn=1Frncosβsinψrn+cr xr+krxr=0mr(¨yr+2ωc xr-ω2cyr)+∑Nn=1Frncosβcosψrn+cr yr+kryr=0mr¨zr-∑Nn=1Frnsinβ+crz zr+krzzr=0Irr2r¨ur+∑Nn=1Frncosβ+cru ur+kruur=Trr烅烄烆r(9)式(6)~式(9)为含陀螺效应随动坐标系下构件的运动微分方程,可以看出,陀螺效应对系统影响的大小主要取决于行星架的转速ωc.上述方程组可统一表述为M¨q+(Cb+Cm+ωcG) q+(Kb+Km-ω2cKω)q=T(10)式中M为构件质量矩阵,T为外载荷向量,q=[xi,yi,zi,ui]T,(i=s,n,r,c);Cb,Cm,G分别为支承阻尼矩阵、啮合阻尼矩阵、陀螺矩阵;Kb,Km,Kω分别为支承刚度矩阵、啮合刚度矩阵、向心刚度矩阵.为降低动力学方程的维数,引入一组相对位移矢量X={δsn,δrn,δcn}T作为新的广义坐标,合并消除式(6)~式(9)中扭转振动方程的刚体位移.为提高数值计算的质量和精度定义量纲一化时间τ和位移标称尺度bc,对降维后的系统方程进行量纲一化处理,所需变量如下[6-9]:τ=t/ωn, ωn=ks1(1/Ms+1/M1槡)珡X(τ)=x(t)/bc, 珋e¨(τ)=¨e(t)/ω2nbcMs=Is/r2bs, M1=I1/r2b1式中Ms,M1为太阳轮、行星轮1的等效质量;rbs,rb1为太阳轮、行星轮1的基圆半径.量纲一化后的系统振动方程可整理成如下2阶微分方程的矩阵形式:珨M珚X··+珚C珚X·+珚Kf(珚X)=珚T(11)式中珨M,珚C,珚K,f(珚X),珚T分别为量纲归一化后的系统质量矩阵、阻尼矩阵、刚度矩阵、间隙函数列矢量和载荷矢量.齿轮副间因啮合刚度的时变性和内外部载荷的激励而产生振动,对于非变位的渐开线齿轮,为准确衡量其动载特性定义如下关系式[10]:Kv=珔kax(t)+c x(t)fn(12)其中fn=T/(Nrbscosβ)为啮合副接触线上的法向静载荷,Kv为量纲一化动载系数.2 动力学特性2.1 固有特性分析表1为斜齿行星齿轮传动系统的动力学参数,其中齿轮模数m=4,压力角α=20°,螺旋角β=12°,扭转阻尼比ξ=0.005,啮合阻尼比ζ=0.03.表1 斜齿行星齿轮系统动力学参数Table 1 Dynamic parameters of helical planetary gear train参数太阳轮行星轮内齿圈行星架齿数23 43 109转动惯量/(kg·m2)0.001 27 0.001 66 0.041 4 0.023 7支承刚度/(N/m)kx=ky=1.08×108 kz=1.33×108扭转刚度/(N/m)ks=kp=kc=0 kr=109啮合刚度/(N/m)ksn=1.26×108 krn=1.53×108当不考虑系统阻尼和外部激励项时,系统动力学模型简化为[ki(t)-ω2imi]ηi=0 (i=s,n,r,c)(13)mi=diag{mi,mi,mi,Mi}式中mi为构件i的质量,Mi为构件i的等效质量,ηi={xi,yi,zi,ui}T为n阶模态振型矢量.取行星轮数目N=3,4,5时,解得系统固有频率含3类重根,其重根数和固有频率如表2所1032航 空 动 力 学 报第30卷示,3类重根分别对应着3种振动模式,即中心构件轴向平移-扭转耦合振动、中心构件径向平移振动、以及行星轮振动模式.设系统固有频率为ωi(i=1,2,3,…,4 N+12),则单重根(10个)对应中心构件轴向平移扭转振动模式,双重根(7对)对应中心构件径向平移振动模式,行星轮振动模式时的重根数r(r=N-3,N>3)与行星轮数目N相关.系统第j阶固有频率ωj,其对应的振型矢量为ηj={ζji}T,其中ζ=x,y,z,u;i=s,n,r,c;j=1,2,3,…,4 N+12).以行星轮数目N=4为例,系统共有28个特征值,其3种振动模式的振型如图4所示,任一模式下构件均存在某些振型矢量元素为0,即未引起振动.图5为对应的3种模式的振动示意图,其中图5(a)为中心构件轴向平移-扭转耦合振动模式(z,u方向振动),对应10阶固有频率,重根数为1;图5(b)为中心构件径向平移振动模式(x,y方向振动),共有14阶固有频率,重根数为2;图5(c)为行星轮振动模式(x,y,z,u方向均振动),含有4阶固有频率,此时中心构件未振动,重根数为1.表2 系统固有频率的重根数与固有频率Table 2 Multiplicity and natural frequency of the system行星轮数固有频率ω/Hz中心构件轴向平移扭转模式(重根数r=1)中心构件径向平移模式(重根数r=2)行星轮模式(重根数r=N-3)30,757,1 041,1 964,2 455,2 884,3 019,3 710,6 193,6 354948,1 255,2 156,2 538,2 870,4 828,5 94240,721,969,2 049,2 533,2 903,3 150,3 731,6 498,6 962923,1 239,2 141,2 529,2 981,4 928,6 3782 141,2 485,4 097,4 55650,689,893,2 084,2 587,2 902,3 293,3 807,6 776,7 526899,1 214,2 188,2 522,3 101,5 021,6 7802 141,2 485,4 097,4 556图4 N=4时系统3种振动模式的振型图Fig.4 Three types vibration mode diagrams ofsystem when N=42.2 啮合相位差对动载特性的影响行星齿轮啮合传动中,前后齿面均承受载荷,啮合相位差的存在使内外啮合之间产生异步啮图5 3种振动模式的振动示意图Fig.5 Three types vibration schematic diagrams合,其相位关系主要由齿轮齿数和行星轮个数决定.假定以图1中行星轮1的位置为基准,当行星架转动2π角时,从行星轮1到达行星轮i需完成ψizs/2π次啮合次数,从而可得行星轮的啮合相位关系为[11-12]ψsi=±izs2π ψri=izr2π(14)式中“+”表示行星架逆时针转动,“-”表示行星架顺时针转动, i为第i个行星轮与基准行星轮圆周方向的夹角.以4个行星轮为例,各行星轮之间的周向夹角为π/2,行星架逆时针转动时,其啮合相位关系2032 第9期林 何等:斜齿行星齿轮传动系统振动模式与动载特性分别为0,zr/4,zr/2,3zr/4.图6为相位差与动载特性的关系,由图6知未考虑啮合相位差时外、内啮合的动载系数分别为1.28和1.35,计入啮合相位差时动载系数分别为1.41和1.43,两者均有所增大,此时内啮合的振动强于外啮合.图6 动载系数Kv时间历程Fig.6 Time histories of dynamical coefficient Kv2.3 多激励对动载特性的影响图7为系统在多种激励下的动载系数时间历程(图中s-p,r-p分别表示行星轮与太阳轮、内齿圈间的啮合.图7(a)刚度波动系数ζ=1.715;图7(b)齿侧间隙b=100μm;图7(c)综合误差e=15μm;图7(d)外载荷l=3 564N·m).外部载荷的波动以行星架负载所受载荷的谐波函数形式给出即l=Tsi[1+λsin(ωct+ )].4种激励下的Kv均为单周期简谐响应,都在1附近波动,振幅不同,均为正面冲击,综合误差激励时动载系数最大,且太阳轮、行星轮间的动载系数均大于行星轮、内齿圈间的动载系数[13-15].由图8(图中横坐标、纵坐标的数值进行了量纲一化的处理)系统对时变刚度的响应知,ζ=1.723时内啮合动载系数的时间历程为简谐函数,外啮合则为多频响应,显示出非线性特征,根据Poincaré映射(图8(c))和FFT(快速傅里叶变换)频谱分析(图8(d))知内、外啮合均为2周期次谐响应,系统周期在此处分岔为2T.改变激励参数,当b=150μm,e=20μm时,图9(a)所示内啮合相图开始出现非重叠,此时Kv为多周期谐响应;图9(b)中l=3 208N·m时,相图7 不同激励下的动载系数时间历程Fig.7 Time histories of dynamical coefficient under various excitations图8 ζ=1.723时系统动态响应Fig.8 Dynamic responses of system whenζ=1.723图9 不同激励下的系统动态响应Fig.9 Dynamic responses of system under various excitations3032航 空 动 力 学 报第30卷平面为一定区域相互层叠的椭圆,内、外啮合均表现出强非线性,系统进入混沌状态[16-18],上述亦表明内啮合较外啮合更快的进入混沌状态.3 结 论1)斜齿行星齿轮系统含有3种典型振动模式:即轴向平移-扭转耦合振动模式(重根数r=1),径向平移振动模式(重根数r=2),行星轮振动模式(重根数r=N-3,N>3).2)啮合相位差的存在使内、外啮合的动载系数有所增大,动力学设计时应考虑啮合相位差的影响.3)在多种激励分别作用下系统为单周期简谐响应,当刚度波动系数ζ=1.723时,系统分岔为2周期次谐波响应,改变激励参数时,内啮合较外啮合更快的进入混沌状态.参考文献:[1] 屈文涛.直升机动力旋翼系统及航空齿轮系统的振动研究[D].西安:西北工业大学,1995.QU Wentao.Study on helicopter rotor dynamic system andthe vibration of the gear system[D].Xi’an:NorthwesternPolytechnical University,1995.(in Chinese)[2] 杨通强,宋轶民,张策,等.斜齿行星齿轮系统自由振动特性分析[J].机械工程学报,2005,41(7):50-55.YANG Tongqiang,SONG Yimin,ZHANG Ce,et al.Prop-erty analysis of free vibration of helical planetary geartrains[J].Journal of Mechanical Engineering,2005,41(7):50-55.(in Chinese)[3] Parker R G,Lin J.Mesh phasing relationships in planetaryand epicyclic gears[J].Journal of Mechanical Design,2004,126(2):365-370.[4] Eritenel T,Parker R G.Modal properties of three-dimen-sional helical planetary gears[J].Journal of Sound and Vi-bration,2009,325(1):397-420.[5] Ambarisha V K,Parker R G.Suppression of planet moderesponse in planetary gear dynamics through mesh phasing[J].Journal of Vibration and Acoustics,2006,128(2):133-142.[6] Mark V D,Hines J A.Stationary transducer response toplanetary-gear vibration excitation with non-uniform plan-et loading[J].Mechanical Systems and Signal Processing,2009,23(4):1366-1381.[7] 孙智明,沈允文,李素有.封闭行星齿轮传动系统的扭振特性研究[J].航空动力学报,2001,16(2):163-166.SUN Zhimin,SHEN Yunwen,LI Suyou.A study on torsionalvibration in an encased differential gear train[J].Journal ofAerospace Power,2001,16(2):163-166.(in Chinese)[8] 李润方,王建军.齿轮系统动力学:振动、冲击、噪声[M].北京:科学出版社,1997.[9] Sondkar P,Kahraman A.A dynamic model of a double-hel-ical planetary gear set[J].Mechanism and Machine Theo-ry,2013,70(7):157-174.[10] 郭家舜,王三民,刘海霞.某新型直升机传动系统弯-扭耦合振动特性研究[J].振动与冲击,2009,28(10):132-140.GUO Jiashun,WANG Sanmin,LIU Haixia.Lateral-tor-sional coupled vibration characteristics of transmission of anew type helicopter[J].Journal of Vibration and Shock,2009,28(10):132-140.(in Chinese)[11] 秦大同,肖正明,王建宏.基于啮合相位分析的盾构机减速器多级行星齿轮传动动力学特性[J].机械工程学报,2011,47(23):20-29.QIN Datong,XIAO Zhengming,WANG Jianhong.Dynam-ic characteristics of multi-stage planetary gears of shieldtunneling machine based on planet mesh phasing analysis[J].Journal of Mechanical Engineering,2011,47(23):20-29.(in Chinese)[12] 史志伟.行星传动啮合相位计算方法研究[J].科学计算与工程,2011,11(22):5286-5289.SHI Zhiwei.A method to determine the mesh phasing inplanetary gear train[J].Science Technology and Engineer-ing,2011,11(22):5286-52894.(in Chinese)[13] Tamminana V K,Kahraman A,Vijayakar S.A study ofthe relationship between the dynamic factors and the dy-namic transmission error of spur gear pairs[J].Journal ofMechanical Design,2007,129(1):75-84.[14] Sweeney P J,Randall R B.Gear transmission error meas-urement using phase demodulation[J].Journal of Mechani-cal Engineering Science,1996,210(3):201-213.[15] Velex P,Ajmi M.Dynamic tooth loads and quasi-statictransmission errors in helical gears:approximate dynamicfactor formulae[J].Mechanism and Machine Theory,2007,42(11):1512-1526.[16] 张锁怀,沈允文,董海军,等.转速和不平衡质量对齿轮拍击振动的影响[J].航空动力学报,2003,18(1):197-203.ZHANG Suohuai,SHEN Yunwen,DONG Haijun,et al.The influence of speed and mass unbalance on dynamiccharacteristics of a gear-rattling system[J].Journal ofAerospace Power,2003,18(1):197-203.(in Chinese)[17] 朱自冰,朱如鹏,鲍和云.两级星型齿轮传动系统非线性动力学研究[J].航空动力学报,2007,22(11):1963-1970.ZHU Zibing,ZHU Rupeng,BAO Heyun.Non-linear dy-namic study of 2-stage gear train[J].Journal of AerospacePower,2007,22(11):1963-1970.(in Chinese)[18] 崔亚辉,刘占生,叶建槐,等.内外激励作用下含侧隙的齿轮传动系统的分岔和混沌[J].机械工程学报,2010,46(11):129-136.CUI Yahui,LIU Zhansheng,YE Jianhuai,et al.Bifurcationand chaos of gear transmission system with clearance sub-jected to internal and external excitation[J].Journal ofMechanical Engineering,2010,46(11):129-136.(in Chinese)(编辑:秦理曼、叶 青)4032。
电机齿轮系统的振动分析与研究在电机应用领域中,齿轮传动系统是一项重要的机械传动形式。
齿轮传动系统的正常运行需要伴随着可接受的振动和噪声。
然而,齿轮传动系统的振动和噪声会对电机的性能和寿命产生负面影响,因此对其振动特性的分析和研究是至关重要的。
1.齿轮传动系统振动原因(1)设计与制造相关因素首先,齿轮传动系统振动的出现与设计有关。
如果设计不合理、制造精度过低或者安装不良,将会导致系统存在一定的不平衡和偏心,从而产生振动。
(2)齿轮动力学齿轮是齿轮传动系统的核心部分,其形状、尺寸、材料和齿数等特性会影响其振动特性。
同时,齿轮间的啮合会引起动力学因素,包括齿隙、弹性变形、齿面接触变形等,这些因素都会对系统的振动特性产生影响。
(3)外部环境因素齿轮传动系统所处环境中的外部因素也会对其振动特性产生一定的影响,比如加速度、冲击、温度变化和随机震动等。
2.振动分析方法在实际应用中,有许多方法可以用于齿轮传动系统振动分析。
其中,常用的振动分析方法包括:(1)频响法频响法是一种通过对系统在不同频率下的振动响应进行分析来研究其振动特性的方法。
通过测量系统在不同频率下的响应,并与预设的激励信号进行比较,可以确定系统的传递函数。
(2)时域法时域法是一种通过对系统振动信号进行时间域分析来识别和分析系统振动特性的方法。
它通常通过对振动信号做频谱分析、模态分析等方式来确定系统的振动模态,以便对系统进行分析和优化。
(3)有限元分析法有限元分析法是一种通过建立齿轮传动系统的有限元模型来分析系统振动特性的方法。
可以通过对模型中各个部分进行网格分割,然后根据材料特性以及有限元法的基本原理求解系统的振动模态。
3.振动控制方法对于齿轮传动系统振动过大的问题,我们可以采取相应的振动控制措施来降低其振动量。
常见的振动控制方法包括:(1)降噪技术降噪技术是一种通过对系统噪声进行控制来降低振动量的方法。
包括有隔音措施、噪声消除算法等。
(2)刚度调节通过调节系统的刚度可以改变其振动显著性。