x1
ha* ( zmin z1 ) ; z min
ha * 1 x1 x2
2zmin (z1 z2 ) zmin
x1 x20 z1 z2 2zmin
当采用等移距变位时,两轮齿数之和必须大于或至少等
于最少齿数的两倍。
(2)x1+x2=0 a’=a ,’=,y=0
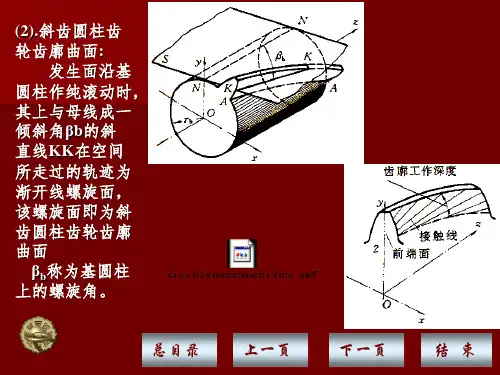
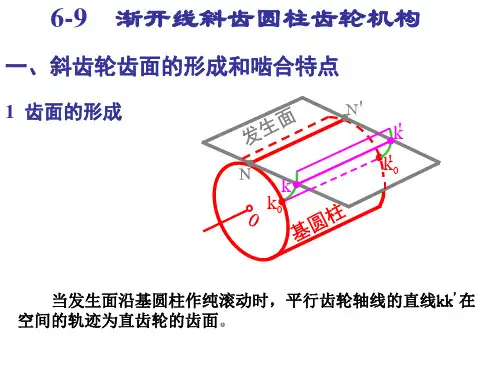
斜齿轮的螺旋角β,表示斜齿轮
轮齿的倾斜程度。
tg d l (l 为导程)
基圆柱上的螺旋角:
tg b tg cos t
2. 齿距和模数 pn pt cos
mn mt cos
3. 法面压力角n和端面压力角t
ac tgt ac tgn
aa’c中 acac cos
cn* — 法面顶隙系数, 其值与直齿轮的
值一样,为标准值;
c
* t
— zmn / cos 标准中心距: a (d1 d2) / 2 mt (z1 z2) / 2 mn(z1 z2) / 2cos
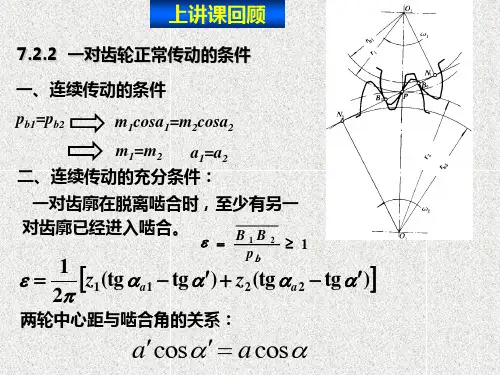
1 (2 外啮合)
2、连续传动条件
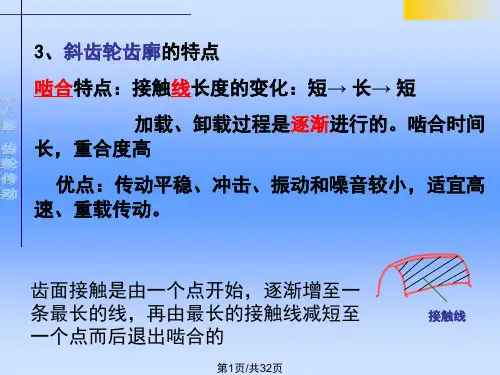
斜齿轮传动的实际啮合区比直齿
轮增大了 L B tg b
斜齿轮传动的重合度较直齿轮
传动增加了εβ --- 轴向重合度
L
pbt
B tg b
pbt
B tg cost B sin / cos B sin
tg n
tg t
cos
4. 斜齿轮传动的几何尺寸
齿顶高: ha ha*nmn 或ha ha*tmt 齿根高: hf ha*nmn cn*mn 或hf ha*tmt ct*mt