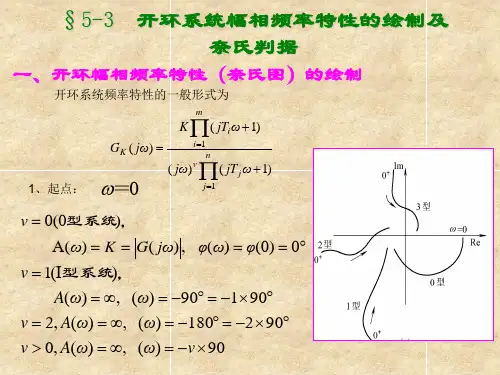
开环幅相频率特性
- 格式:ppt
- 大小:505.01 KB
- 文档页数:24
自动控制原理填空题复习(一)1. 对于一个自动控制的性能要求可以概括为三个方面: 稳定性 、 快速性 、 准确性 。
2. 反馈控制系统的工作原理是按 偏差 进行控制,控制作用使 偏差 消除或减小,保证系统的输出量按给定输入的要求变化。
3. 系统的传递函数只与系统 本身 有关,而与系统的输入无关。
4. 自动控制系统按控制方式分,基本控制方式有:开环控制系统 、 闭环控制系统 、混合控制系统 三种。
5. 传递函数G(S)的拉氏反变换是系统的单位 阶跃 响应。
6. 线性连续系统的数学模型有 电机转速自动控制系统。
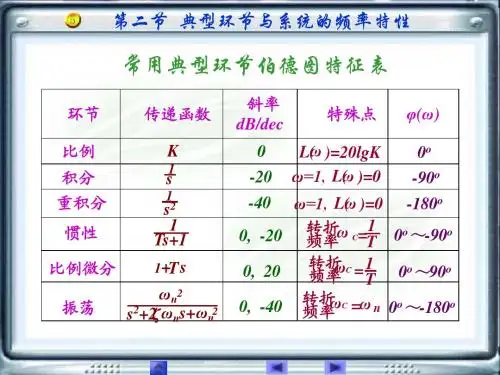
7. ★系统开环频率特性的低频段,主要是由 惯性 环节和 一阶微分 环节来确定。
8. 稳定系统的开环幅相频率特性靠近(-1,j0)点的程度表征了系统的相对稳定性,它距离(-1,j0)点越 远 ,闭环系统相对稳定性就越高。
9. 频域的相对稳定性常用 相角裕度 和 幅值裕度 表示,工程上常用这里两个量来估算系统的时域性能指标。
10. 某单位反馈系统的开环传递函数2()(5)G S s s =+,则其开环频率特性是 2-2.0tan -)(1πωωϕ-= ,开环幅频特性是424252)(A ωωω+=,开环对数频率特性曲线的转折频率为 。
11. 单位负反馈系统开环传递函数为2()(5)G S s s =+,在输入信号r(t)=sint 作用下,,系统的稳态输出c ss (t)= , 系统的稳态误差e ss (t)= .12. 开环系统的频率特性与闭环系统的时间响应有关。
开环系统的低频段表征闭环系统的 稳定性 ;开环系统的中频段表征闭环系统的 动态性能 ;开环系统的高频段表征闭环系统的 抗干扰能力 。
自动控制原理填空题复习(二)1、反馈控制又称偏差控制,其控制作用是通过 输入量 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 参考输入 的前馈复合控制和按 扰动 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G 1(s)+G 2(s) (用G 1(s)与G 2(s) 表示)。
自控原理填空题复习指南1.对于一个自动控制的性能要求可以概括为三个方面:稳定性、快速性、准确性。
2.反馈控制系统的工作原理是按偏差进行控制,控制作用使偏差消除或减小,保证系统的输出量按给定输入的要求变化。
3.系统的传递函数只与系统本身结构参数有关,而与系统的输入无关。
4.微分方程是时间域中的连续(填连续或离散)系统的数学模型,传递函数是复数域中连续(填连续或离散)系统的数学模型。
差分方程是时间域中的离散(填连续或离散)系统的数学模型,脉冲传递函数是z域离散(填连续或离散)系统的数学模型。
频率特性是频率域数学模型。
(此题11/12/13班只需了解连续部分)5.自动控制系统按控制方式分,基本控制方式有:开环、闭环、复合三种。
6.传递函数G(S)的拉氏反变换是系统的单位脉冲响应。
7.线性连续定常系统的稳定的充分必要条件是闭环系统特征方程的根全部具有负实部,或者闭环传递函数的极点均位于s左半平面;线性离散定常系统稳定的充分必要条件是闭环系统特征方程的根模均小于1,或者闭环传递函数的极点均位于z平面单位园内。
8. 线性连续系统的数学模型有 微分方程、传递函数、频率特性、状态空间表达式(现代部分讲解) ;线性离散系统模型有 差分方程、脉冲传递函数、状态空间表达式(现代部分讲解)) 。
9. 系统开环频率特性的低频段,主要是由 放大环节(开环增益) 环节与 微积分 环节来确定。
10. 常用研究非线性系统的方法有 相平面 与 描述函数 两种。
11. 稳定系统的开环幅相频率特性靠近(-1,j0)点的程度表征了系统的相对稳定性,它距离(-1,j0)点越 远 ,闭环系统相对稳定性就越高。
12. 频域的相对稳定性常用 相角裕度(相位裕度) 与 幅值裕度(增益裕度) 表示,工程上常用这里两个量来估算系统的时域性能指标。
13. 某单位反馈系统的开环传递函数2()(5)G S s s =+,则其开环频率特性是5(90arctan )2()(5)o w j G jw jw jw +==+,开环幅频开环对数频率特性曲线的转折频率为5rad/s 。
试卷一一、填空题(每空1分,共15分)自动操纵是在___________情形下,利用___________使___________的被控量自动地按预先给定的规律去运动。
对操纵系统的大体要求是___________、___________和___________。
线性定常系统的传递函数概念为:初始条件___________时,系统___________拉式变换与系统___________拉式变换之比。
在频率域中表征系统稳固程度的指标是:___________和___________。
假设环节的传递函数为s K,那么其对数幅频特性L ()在零分贝点处的频率数值为______________。
Bode 图中对数相频特性图上的-180o 线对应于奈奎斯特图中的___________。
标志着系统最终可能达到的操纵精度,它既与系统的结构及参数有关,也取决于___________的形式及大小。
二、简答题(此题15分,其中第1小题10分,第2小题5分) 试求出以下图无源网络的传递函数)(/)(s U s U r c已知系统的闭环特点方程为0)3)(2)(1(=++++k s s s 试确信系统稳固时K 的取值范围 三、计算题(此题40分,其中第一、3小题15分,第2小题10分) 已知系统的结构图如以下图所示。
假设)(1)(t t r =时,试求 (1)当0=f K 时,求系统超调量%σ及调剂时刻s t。
(2)当0≠f K 时,假设要使超调量%σ=20%,试求f K 应为多大?并求出此刻的调剂时刻s t 的值。
(3)比较上述两种情形,说明内反馈s K f 的作用是什么?R (s )C (s )-2K sN(s )1K系统结构图如以下图所示。
当输入信号)(1)(t t r =,干扰信号)(1)(t t n =时,求系统总的稳态误差系统结构图假设以下图所示,求传递函数)(/)(s R s C ,)(/)(s R s E四、图解题(此题30分,其中第1小题20分,第2小题10分) 已知某最小相位系统开环对数幅频特性如下图。
本科--自动控制原理(A1卷)一、单项选择题(每题2分,16分共8小题)1.经典控制理论主要以( A )为数学模型,研究单输入单输出系统的分析和设计问题。
A.传递函数 B.微分方程 C.状态方程 D.差分方程2.现代控制理论主要以( D )为数学模型。
A .频域分析 B.根轨迹 C. 时域分析法 D.状态方程 3.自动控制系统主要有控制器和( C )组成。
A.检测环节B.放大环节C.被控对象D.调节环节 4.在经典控制理论中广泛应用的频率法和根轨迹法,都是在( A )基础上建立起来的。
A .传递函数 B .频率分析 C .惯性环节 D .伯德图 5. 开环增益K 增加,系统的稳定性( C )。
A .变好 B. 变坏 C. 不变 D. 不一定 6. 已知 f(t)=t+1,其L[f(t)]=( D )。
A .S+S2 B. S2 C. 1S D. 211SS + 7.自动控制系统的反馈环节中必须具有( B )。
A.给定元件 B .检测元件 C.放大元件 D.执行元件 8.已知系统的特征方程为S3+S2+τS+5=0,则系统稳定的τ值范围为(C )。
A .τ>0B. τ<0C. τ>5D. 0<τ<5 二、判断题(每题2分,10分共5小题)注:A.正确B.错误1.对控制系统的基本要求一般可以归纳为稳定性、快速性 和平稳性。
B A.正确 B.错误2.按系统有无反馈,通常可将控制系统分为开环控制系统和闭环控制系统 A 。
A.正确 B.错误3.相角条件不是确定根轨迹S 平面上一点是否在根轨迹上的充分必要条件。
B A.正确 B.错误4.频率响应是线性定常系统对谐波输入的稳态响应。
A A.正确 B.错误5.稳态误差不仅取决于系统自身的结构参数,而且与输入信号的类型有关A 。
A.正确 B.错误 三、填空题(每题2分,10分共5小题)1.典型环节的传递函数中,比例环节的传递函数是 K 。
108第5章频率特性法教材习题同步解析5.1 一放大器的传递函数为:G (s )=1+Ts K测得其频率响应,当ω=1rad/s 时,稳态输出与输入信号的幅值比为12/2,稳态输出与输入信号的相位差为-π/4。
求放大系数K 及时间常数T 。
解:系统稳态输出与输入信号的幅值比为A ==222172K T ω=+ 稳态输出与输入信号的相位差arctan 45T ϕω=-=-︒,即1T ω=当ω=1rad/s 时,联立以上方程得T =1,K =12放大器的传递函数为:G (s )=121s +5.2 已知单位负反馈系统的开环传递函数为5()1K G s s =+ 根据频率特性的物理意义,求闭环输入信号分别为以下信号时闭环系统的稳态输出。
(1)r (t )=sin (t +30°); (2)r (t )=2cos (2t -45°);(3)r (t )= sin (t +15°)-2cos (2t -45°); 解:该系统的闭环传递函数为65)(+=Φs s 闭环系统的幅频特性为109365)(2+=ωωA闭环系统的相频特性为6arctan )(ωωϕ-=(1)输入信号的频率为1ω=,因此有37375)(=ωA ,()9.46ϕω︒=- 系统的稳态输出()20.54)37ss c t t ︒=+ (2)输入信号的频率为2ω=,因此有()A ω=,()18.43ϕω︒=- 系统的稳态输出()cos(263.43)2ss c t t ︒=- (3)由题(1)和题(2)有对于输入分量1:sin (t +15°),系统的稳态输出如下1() 5.54)37ss c t t ︒=+ 对于输入分量2:-2cos (2t -45°),系统的稳态输出为2()63.43)ss c t t ︒=- 根据线性系统的叠加定理,系统总的稳态输出为)4363.632cos(210)537.5sin(37375)(︒︒--+=t t t c ss5.3 绘出下列各传递函数对应的幅相频率特性与对数频率特性。