松下伺服发生故障报警代码一览及对策精编版
- 格式:doc
- 大小:250.00 KB
- 文档页数:17
松下伺服故障报警代码分析及处理
一、报警代码
1.F10:输出电流检测点失效:
输出电流检测点是伺服控制器检测电机输出功率的重要指标。
出现这一报警的原因很可能是电机母线上的电流值没有正常检测到,或者控制器内部的电流检测电路出现故障,可能是放大器的结构失效,也可能是A/D 转换器的出错。
2.F11:DC组件过载
DC组件过载的报警指示DC电机运行台架上电机电流过载。
原因可能是电机处于锁死或粘连状态,电机容量不够,电机负载过大,或伺服控制器不正常检测电机负载过重。
3.F12:温度传感器信号异常
温度传感器信号异常报警指出,温度传感器的信号输出不正常。
原因很可能是温度传感器的电路失效,或伺服控制器内部的A/D转换器的电路失效,导致无法正常检测温度数值。
二、处理方法
1.F10报警处理方法
(1)检查电机母线是否处于正常状态,是否有破损或过载现象;
(2)检查控制器内部电机输出功率放大器是否正常;
(3)更换A/D转换器;
(4)重新调整控制器电机控制程序。
2.F11报警处理方法:
(1)检查电机是否出现锁死或粘连的情况;(2)检查电机的容量是否足够;。

在逆变器上流动电流超检查电机电缆是
否短路等。
驱动器故障(回路,部件不良)(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
电机电缆U,V,W (2)检查电机电缆连接U,V,W 是否短路,连接器导线是否有毛刺等。
正确连接电机电缆。
电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。
绝缘不良时请更换新电机。
电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
由于频繁接通,关闭伺服,导致动态制动器(6)更换驱动器。
请勿通过接通,切断伺服进行运转,停止操作。
电机与驱动器不匹(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
脉冲输入和接通伺服时序为同步,或脉冲输(8)接通伺服100ms以后,再输入脉冲。
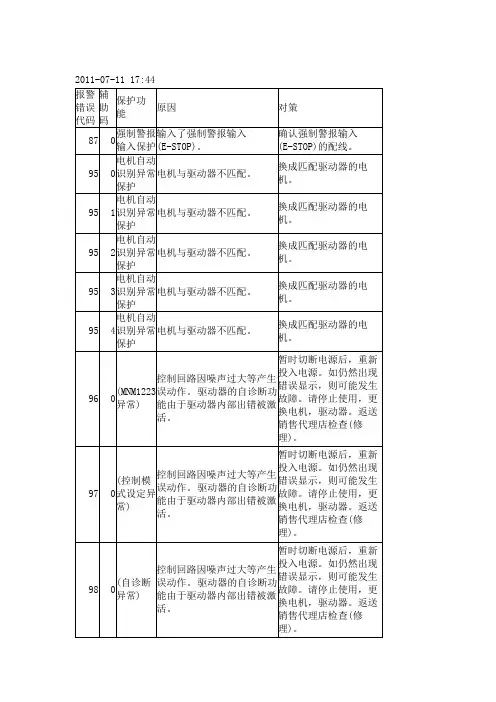
2011-07-11 17:4499 0(其它异常)控制回路因噪声过大等产生误动作。
驱动器的自诊断功能由于驱动器内部出错被激活。
暂时切断电源后,重新投入电源。
如仍然出现错误显示,则可能发生故障。
请停止使用,更换电机,驱动器。
返送销售代理店检查(修理)。
| |2011-07-11 17:43报警错误代码辅助码保护功能原因对策51 0光栅尺状态0异常保护光栅尺错误码(ALMC)的0位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 1光栅尺状态1异常保护光栅尺错误码(ALMC)的1位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 2光栅尺状态2异常保护光栅尺错误码(ALMC)的2位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 3光栅尺状态3异常保护光栅尺错误码(ALMC)的3位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 4光栅尺状态4异常保护光栅尺错误码(ALMC)的4位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 5光栅尺状态5异常保护光栅尺错误码(ALMC)的5位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
761 (内置ROM 异常)控制回路因噪声过大等产生误动作。
驱动器的自诊断功能由于驱动器内部出错被激活。
暂时切断电源后,重新投入电源。
如仍然出现错误显示,则可能发生故障。
请停止使用,更换电机,驱动器。
返送销售代理店检查(修理)。
77 0 (栈存储空间异常)控制回路因噪声过大等产生误动作。
驱动器的自诊断功能由于驱动器内部出错被激活。
暂时切断电源后,重新投入电源。
松下伺服驱动器故障报警内容和处理方法在工业自动化领域,松下伺服驱动器以其出色的性能和稳定性得到了广泛的应用。
然而,在使用过程中,难免会遇到各种故障报警情况。
了解这些故障报警的内容以及掌握相应的处理方法,对于确保设备的正常运行和提高生产效率至关重要。
一、松下伺服驱动器常见的故障报警内容1、过电流报警(OC)当驱动器检测到电机电流超过设定的允许值时,会触发过电流报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
2、过电压报警(OV)电源电压过高或者在制动过程中产生的再生能量无法及时释放,都可能导致过电压报警。
3、欠电压报警(UV)供电电源电压过低,无法满足驱动器的正常工作要求,就会出现欠电压报警。
4、编码器故障报警(ENC)编码器是用于反馈电机位置和速度信息的重要部件。
如果编码器出现损坏、连接不良或信号干扰等问题,驱动器会发出编码器故障报警。
5、过热报警(OH)驱动器内部温度过高,可能是由于环境温度过高、散热不良、长时间过载运行等原因造成的。
6、位置偏差过大报警(Pd)当实际位置与指令位置的偏差超过设定的允许值时,会触发位置偏差过大报警。
7、速度偏差过大报警(Sv)实际速度与指令速度的偏差超出了规定范围,导致速度偏差过大报警。
8、通信故障报警(COM)驱动器与控制器之间的通信出现异常,例如通信线路中断、通信协议不匹配等。
二、松下伺服驱动器故障报警的处理方法1、过电流报警(OC)处理方法(1)首先检查电机是否过载,如果是,减轻负载或更换更大功率的电机。
(2)检查电机和驱动器之间的连接线路是否短路,修复或更换短路的线路。
(3)确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
(4)如果驱动器故障,需要维修或更换驱动器。
2、过电压报警(OV)处理方法(1)检查电源电压是否过高,如果过高,调整电源电压至正常范围。
(2)优化制动参数,确保再生能量能够及时释放。
可以考虑增加制动电阻或使用能量回馈装置。
2011-07-11 17:44990 (其它异常) 控制回路因噪声过大等产生误动作。
驱动器的自诊断功能由于驱动器内部出错被激活。
暂时切断电源后,重新投入电源。
如仍然出现错误显示,则可能发生故障。
请停止使用,更换电机,驱动器。
返送销售代理店检查(修理)。
| |2011-07-11 17:43 报警错误代码 辅助码保护功能原因对策51 0 光栅尺状态0异常保护 光栅尺错误码(ALMC)的0位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 1 光栅尺状态1异常保护 光栅尺错误码(ALMC)的1位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 2 光栅尺状态2异常保护 光栅尺错误码(ALMC)的2位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 3 光栅尺状态3异常保护 光栅尺错误码(ALMC)的3位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 4 光栅尺状态4异常保护 光栅尺错误码(ALMC)的4位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
51 5 光栅尺状态5异常保护光栅尺错误码(ALMC)的5位码变为1。
请检查光栅尺的规格。
排除异常原因后,通过前面板消除光栅尺的错误。
然后请切断控制电源,重启。
76 1(内置ROM异常)控制回路因噪声过大等产生误动作。
驱动器的自诊断功能由于驱动器内部出错被激活。
暂时切断电源后,重新投入电源。
如仍然出现错误显示,则可能发生故障。
请停止使用,更换电机,驱动器。
返送销售代理店检查(修理)。
77 0(栈存储空间异常)控制回路因噪声过大等产生误动作。
驱动器的自诊断功能由于驱动器内部出错被激活。
松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统以其出色的性能和稳定性备受青睐。
然而,就像任何复杂的机电设备一样,松下伺服在运行过程中也可能会出现故障,并通过报警代码来提示用户。
了解这些报警代码以及相应的对策,对于快速排除故障、恢复生产至关重要。
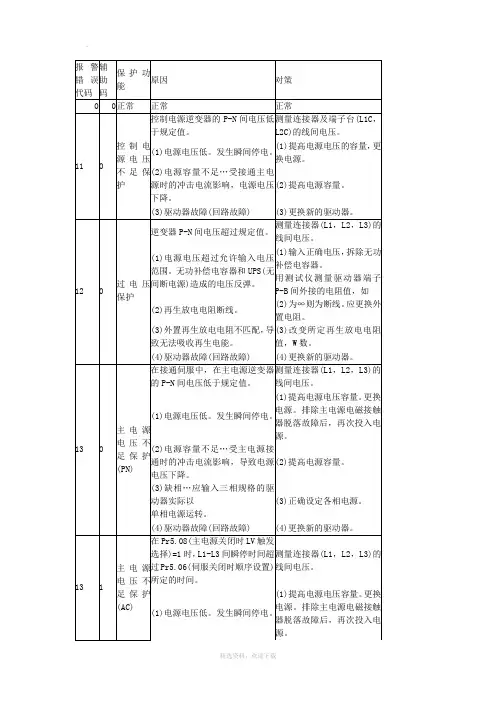
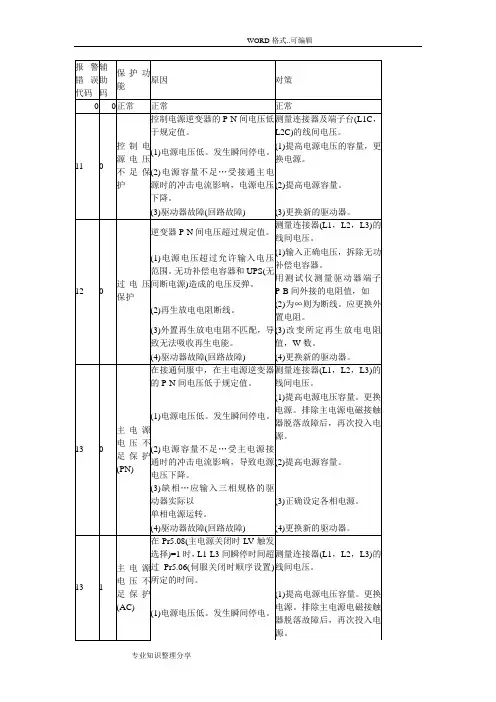
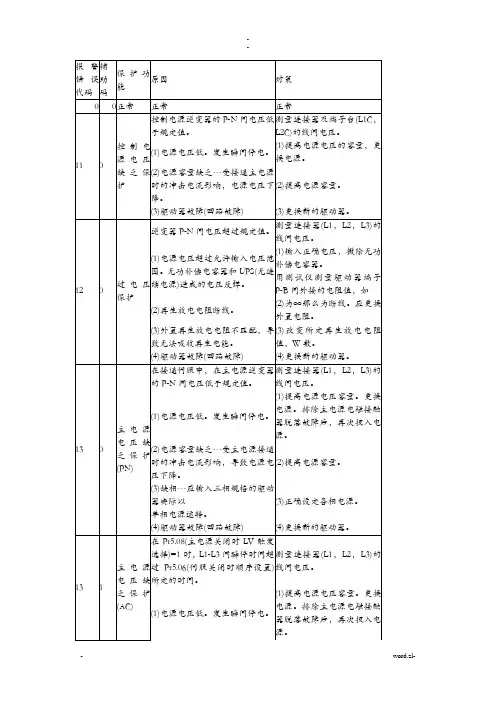
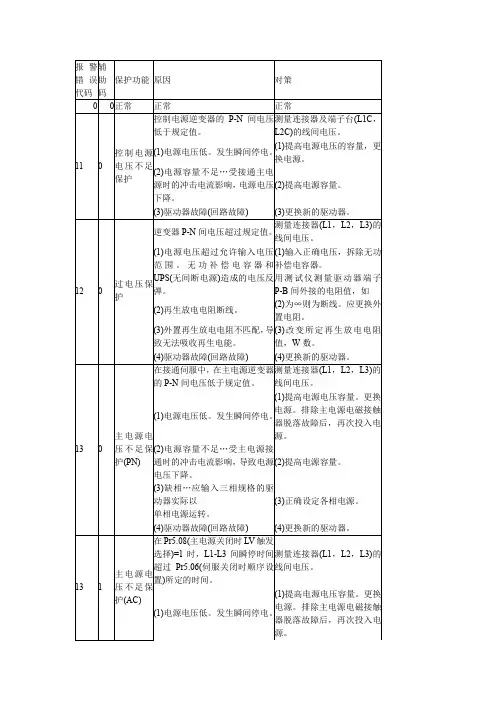
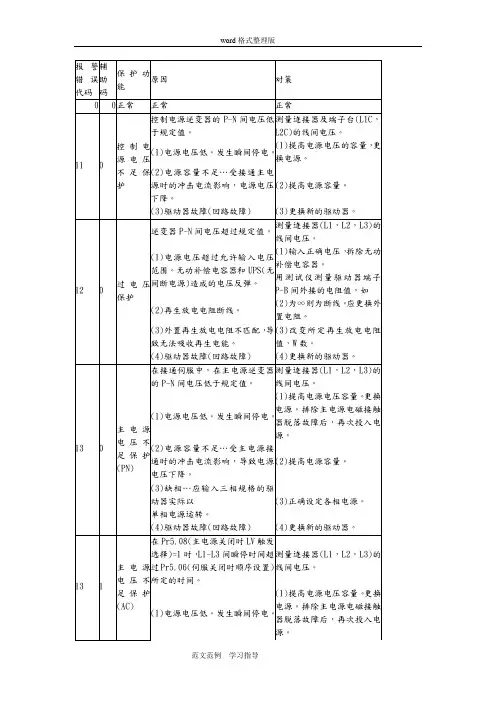
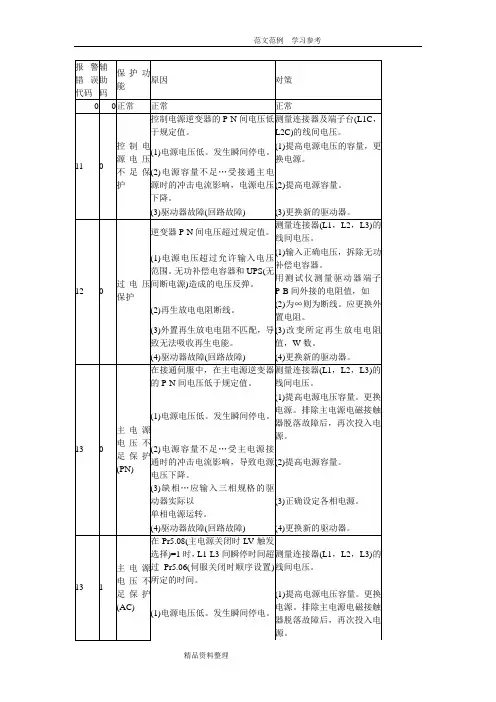
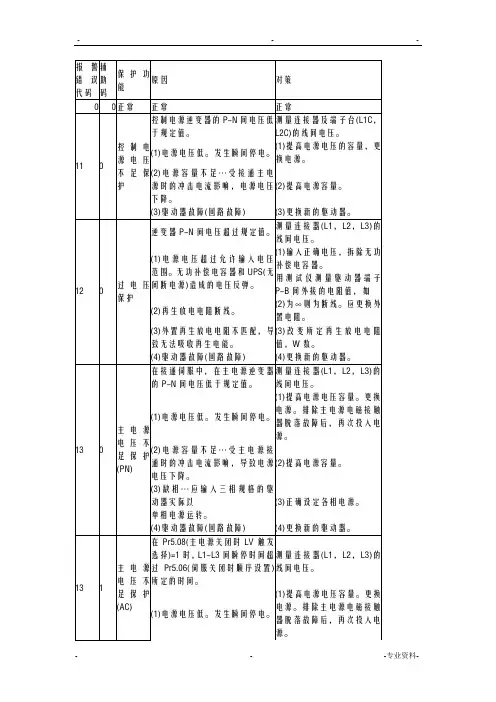
一、常见的松下伺服报警代码1、 11 号报警:控制电源欠电压此报警通常表示控制电源的电压低于规定值。
可能的原因包括电源输入异常、电源线路故障、电源模块损坏等。
对策是检查电源输入是否正常,测量电源电压是否符合要求,修复或更换有问题的电源线路和模块。
2、 12 号报警:过电压当主电路直流电压超过规定值时,会触发此报警。
可能是由于电源电压过高、再生能量过大无法及时消耗等原因。
解决办法包括检查电源电压是否稳定,优化加减速时间以减少再生能量,必要时安装外置再生电阻。
3、 13 号报警:主电源欠电压这意味着主电源的电压低于设定的下限。
可能是电源故障、供电线路问题或者负载过大。
需要确认电源状况,检查线路连接,评估负载是否在合理范围内。
4、 16 号报警:过载过载报警通常是由于电机负载超过了伺服驱动器的额定值。
可能是机械部件卡住、负载突然增大、电机选型不当等原因。
首先要检查机械部分是否顺畅,确认负载情况,如有必要,更换合适的电机。
5、 18 号报警:再生过载当再生能量超过再生电阻的处理能力时会出现此报警。
可能是再生电阻选型不合适、再生电阻损坏或者频繁的急加减速操作。
应检查再生电阻的规格和状态,调整运动参数以减少再生能量。
6、 21 号报警:编码器通讯故障可能是编码器线路连接不良、编码器损坏或者驱动器与编码器之间的通讯参数设置错误。
需要检查编码器的连接线路,确认编码器是否正常工作,正确设置通讯参数。
7、 23 号报警:编码器故障编码器本身出现问题,如内部元件损坏、码盘污染等。
需要清洁或更换编码器。
8、 24 号报警:位置偏差过大这表示实际位置与指令位置的偏差超过了设定的允许范围。
松下伺服驱动器报警代码大全松下伺服驱动器是工业自动化领域中常见的一种设备,它具有高精度、高速度和高可靠性的特点,被广泛应用于各种自动化设备中。
然而,在使用过程中,我们有时会遇到各种报警代码,这些代码对于及时排除故障、保障设备正常运行至关重要。
因此,了解松下伺服驱动器的报警代码以及相应的解决方法显得尤为重要。
1. AL01,电源电压过低。
当松下伺服驱动器显示AL01报警代码时,意味着电源电压过低。
解决方法是首先检查电源线路是否正常连接,然后检查电源供电是否稳定,如有必要,可以更换稳压器或者更换电源线路。
2. AL02,电源电压过高。
AL02报警代码表示电源电压过高,这可能会对伺服驱动器造成损坏。
解决方法是检查电源线路是否正常,排除电源电压过高的原因,必要时使用稳压器进行调节。
3. AL03,过流保护。
当伺服驱动器出现AL03报警代码时,意味着发生了过流保护。
解决方法是检查驱动器输出负载是否正常,检查电机是否有堵转现象,必要时检查驱动器的参数设置是否合理。
4. AL04,过载保护。
AL04报警代码表示发生了过载保护,解决方法是检查负载是否正常,检查传动部件是否有卡滞现象,必要时检查伺服驱动器的参数设置。
5. AL05,过热保护。
当伺服驱动器显示AL05报警代码时,意味着发生了过热保护。
解决方法是检查散热器是否通风良好,及时清理散热器上的灰尘,必要时更换散热器或者增加散热风扇。
6. AL06,编码器故障。
AL06报警代码表示编码器出现故障,解决方法是检查编码器连接是否良好,检查编码器线路是否正常,必要时更换编码器。
7. AL07,通信故障。
当伺服驱动器出现AL07报警代码时,意味着发生了通信故障。
解决方法是检查通信线路是否正常连接,检查通信参数设置是否正确,必要时更换通信线路或者重新设置通信参数。
8. AL08,其他故障。
AL08报警代码表示发生了其他故障,解决方法是通过故障代码手册进行详细排查,根据具体情况进行处理。
松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统因其出色的性能和稳定性而备受青睐。
然而,就像任何复杂的机械设备一样,松下伺服系统在运行过程中也可能会出现各种故障,并通过报警代码来提示用户。
了解这些报警代码及其对应的解决对策,对于快速排除故障、恢复生产至关重要。
以下是对松下伺服常见故障报警代码的详细介绍及相应的解决方法。
一、报警代码 11:过电流保护当松下伺服驱动器检测到电机电流超过设定的允许值时,会触发 11 号报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
解决对策:1、检查电机负载是否过大,如有必要,减轻负载。
2、检查电机电缆是否有短路或接地故障,修复或更换损坏的电缆。
3、检查驱动器是否正常工作,如有故障,及时维修或更换。
4、确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
二、报警代码 12:过电压保护此报警通常表示电源电压过高,或者驱动器内部的再生能量处理电路出现问题。
解决办法:1、检查电源电压是否稳定在规定范围内,如有异常,调整电源。
2、延长减速时间,以减少再生能量的产生。
3、检查外接制动电阻的连接和参数设置是否正确,必要时更换合适的制动电阻。
三、报警代码 13:欠电压保护13 号报警意味着电源电压过低,可能影响伺服系统的正常运行。
应对措施:1、确认电源输入是否正常,检查电源线路是否存在接触不良或断路等问题。
2、测量电源电压,确保其在驱动器的工作电压范围内。
3、如果使用了电源滤波器,检查其是否正常工作。
四、报警代码 14:编码器故障编码器是用于反馈电机位置和速度信息的重要部件,如果出现故障,会导致系统控制精度下降甚至无法正常运行。
处理方法:1、检查编码器的连接是否松动,重新插拔并确保连接牢固。
2、检查编码器电缆是否有损坏,如有,更换电缆。
3、如果编码器本身损坏,需要更换新的编码器。
五、报警代码 16:过载保护当电机长时间运行在超过其额定负载的状态下,会触发过载保护报警。
松下伺服发生故障报警代码一览及对策(七)2011-07-11 17:44
类别:默认分类 | 评论(0) | 浏览(246 )
松下伺服发生故障报警代码一览及对策(六) 2011-07-11 17:43
类别:默认分类 | 评论(0) | 浏览(149 )
松下伺服发生故障报警代码一览及对策(五) 2011-07-11 17:41
类别:默认分类 | 评论(0) | 浏览(174 )
松下伺服发生故障报警代码一览及对策(四) 2011-07-11 17:38
类别:默认分类 | 评论(0) | 浏览(196 )
松下伺服发生故障报警代码一览及对策(三) 2011-07-11 17:37
类别:默认分类 | 评论(0) | 浏览(233 )
松下伺服发生故障报警代码一览及对策(二)
2011-07-11 17:35
类别:默认分类 | 评论(0) | 浏览(391 )
松下伺服发生故障报警代码一览及对策(一)
2011-07-11 17:29
现把松下A5系列伺服的故障报警代码整理出来,供使用松下伺服发生故障的朋友们
尽快排除故障。
A4系列可以参照。
这里每篇文章有大小限制,只好拆开发了,慢慢
找自己需要的了。